
北斗导航载波相位差分定位技术分析
2021-12-17 11:19王新钟
电子测试 2021年22期
王新钟
(国能新朔铁路有限责任公司通信技术分公司,内蒙古鄂尔多斯,017000)
0 引言
北斗导航是基于北斗系统,通过对互联网、通信网络加以整合,进而形成的定位平台。现阶段,多地铁路维护部门均已将北斗导航应用在设备定位环节,随着运行时间的增加,该技术的优点也逐渐显露了出来,即:通过对设备进行可靠、全天候且高精度的定位及导航的方式,确保车辆、人员及其他铁路设备始终处于监管下,相关人员可视情况对其进行实时调度与管理,使设备价值得到发挥。
1 北斗导航差分说明
1.1 系统构成
北斗导航的发展可被划分成两个阶段,2000.10-2007.2为第一阶段,该阶段我国所发射卫星数量为4颗,这4颗卫星均顺利进入预设轨道,用户可借助处于运行状态的卫星,获得自身所需定位及授时服务。2007.3开始进入第二阶段,该阶段研究人员将重心转向建立区域导航还有全球导航方面,北斗导航所能提供服务,逐渐由早期的定位及授时,向文件提供和导航延伸。
该系统可被拆分成三部分,分别是空间段(卫星)、地面段(基站)、用户段(接收机)。空间段包括35颗卫星,且不同卫星对应不同运行轨道,现有轨道包括GEO轨道、IGSO轨道和MEO轨道。地面段通常是指监测站、主控站以及注入站,监测站的职责是接收卫星所传递导航信息,将相关信息提供给主控站,在降低卫星轨道确定难度的基础上,确保卫星时间可得到同步更新[1]。主控站负责获取观测值,通过预处理的方式,获得精密定位所需信息。注入站的核心功能为导入导航数据与信息。
相较于传统的GPS系统,该系统新增了以下功能:首先是短报文通讯,接收机每次所能传输信息约为50个字;其次是精准授时,授时精度通常为40ns至80ns;再次是包容海量用户,该系统所能包容用户最大数值为每小时52万户;最后是高精度定位,在没有对标校站进行设立时,水平定位精度约为100m,而设立相应标校站后,相关精度可提升至15m至20m。
1.2 差分原理
差分定位的优势,主要是可最大程度提升定位精确度,通过对观测信息进行实时获取的方式,快速且精准的确定观测对象位置。事实证明,随着该技术得到广泛应用,企业生产及日常生活均变得更加便利,对其进行研究是大势所趋。受多方因素影响,卫星导航定位与实际情况存在误差的问题始终未能得到彻底解决,单点定位所能达到精度无法满足铁路维护作业要求,基于此,有关部门提出引入差分技术,对定位精度加以提高。
1.3 误差源分析
北斗导航所提供信号,通常有三类误差存在,分别是传播误差、空间误差和用户误差。传播误差往往是指对流程层差以及电离层误差,空间误差以星历误差和星钟误差为主,用户误差同样可分成两类,即噪声误差、多径误差[2]。现有接收机常见伪距误差和估计值如下:
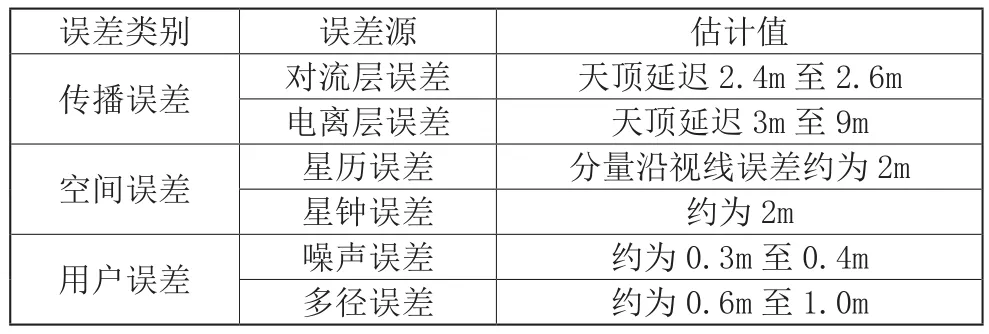
表1 伪距测量值受误差源影响程度
1.4 技术详细分类
根据差分校正对应目标参量,可将差分划分成三类,分别是伪距差分,位置差分,还有本文研究的载波相位差分。符合铁路维护作业要求的差分技术,主要有伪距差分以及载波相位差分,下文将对相关技术进行详细说明:
1.4.1 载波相位差分
铁路作业对设备定位精度所提出要求为不超过1m,本文所讨论技术的精度往往以毫米为单位,由此可见,将载波相位差分用于铁路日常维护作业,可使定位精度最大程度接近预期。
(1)原理
首先,基准站经由数据链向接收机发送实时测量值。其次,由接收机对接收测量值、自身测量值做差分运算,获得差分测量值。最后,根据基线向量、整周模糊度相关数值,对设备所在位置加以确定。
(2)特点
基于该技术所得出测量值的单位多为厘米级。受误差空间所存在相关性制约,在基线长度处于特定范围内时,测量值单位可达到毫米级。
1.4.2 伪距差分
(1)原理
第一步,由接收机对卫星信号进行解码,获得测量值。第二步,结合星历、基准站坐标,对卫星和基准站间的几何距离、测量误差加以确定。第三步,基准站借助数据链向接收机发送差值,接收机可根据差值对伪距进行修正,通过定位解算的方式,对真实位置加以确定。
(2)特点
该技术的应用范围较大,大部分商用接收机所用技术均为伪距差分。铁路设备运行的特点,主要是基准站、移动站距离不断增加,基于该技术对设备进行定位,其精度往往难以获得保障。
2 建立相关差分模型
2.1 载波相位差分
该技术的应用主要涉及四部分内容,分别是:其一,检测并修复载波周跳。其二,模糊浮点运算与求解。其三,模糊度搜索。其四,检验模糊度准确性。无论是人员、车辆,还是其他铁路设备,在正常情况下,均处于移动状态,要想对其进行实时定位,关键是要最大程度缩短对整周模糊度进行运算并求解需要花费的时间,并保证最终结果准确[3]。
该方案指出为彻底消除卫星钟差、接收机钟差给测量值所造成影响,分别在空中、地面对观测量差分进行运算,根据运算结果建立以下方程:
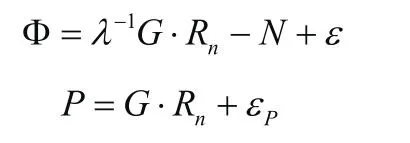
在双差观测公式中,Ф代表载波相位差分所得出观测向量。P代表伪距差分所得出观测向量。Rn代表接收机和移动站对应基线向量。Ɛ代表载波相位差分所得出观测噪声。ƐP代表伪距差分所得出观测噪声。λ代表波长。G代表观测矩阵。N代表整周模糊度。
研究人员考虑到要想使测量效益达到预期,关键要确保测量值满足连续可用的要求,遂决定基于无几何距离法,对载波周跳进行高效检测并修复。该环节能否取得理想效果,通常决定着定位的精确度,分析表明,周跳产生原因是信号失锁/中断使整周计数出现突变/间断,这也间接说明周跳会增加整周相位出现偏差的概率,进而给测量值造成影响,只有对周跳进行高效探测并正确修复,才能使定位精准度达到铁路维护作业要求。随后,在忽略模糊度所对应整数约束的前提下,引入LSAST法,结合观测方程依次确定基线向量、模糊度浮点。将模糊度浮点导入LAMBDA算法中,通过固定整周模糊的方式,对整数最优解和基线向量加以确定。此时,若基准站位置确定,可推断出移动站所处位置。
模糊度求解同样会给定位结果带来影响,上文提到的整周模糊度,通常是指用户测量自身和卫星间距离时,观测到载波波长对应小数波长,由于获取波长整周数难度极大,传统测距技术往往要通过长时间观测,才能获得确定模糊度所需数据,在此基础上,对观测所得数据加以处理并得出最终结果,无法保证观测结果的时效性[4]。引入LSAST法,可从根本上解决上述问题,其现实意义有目共睹。
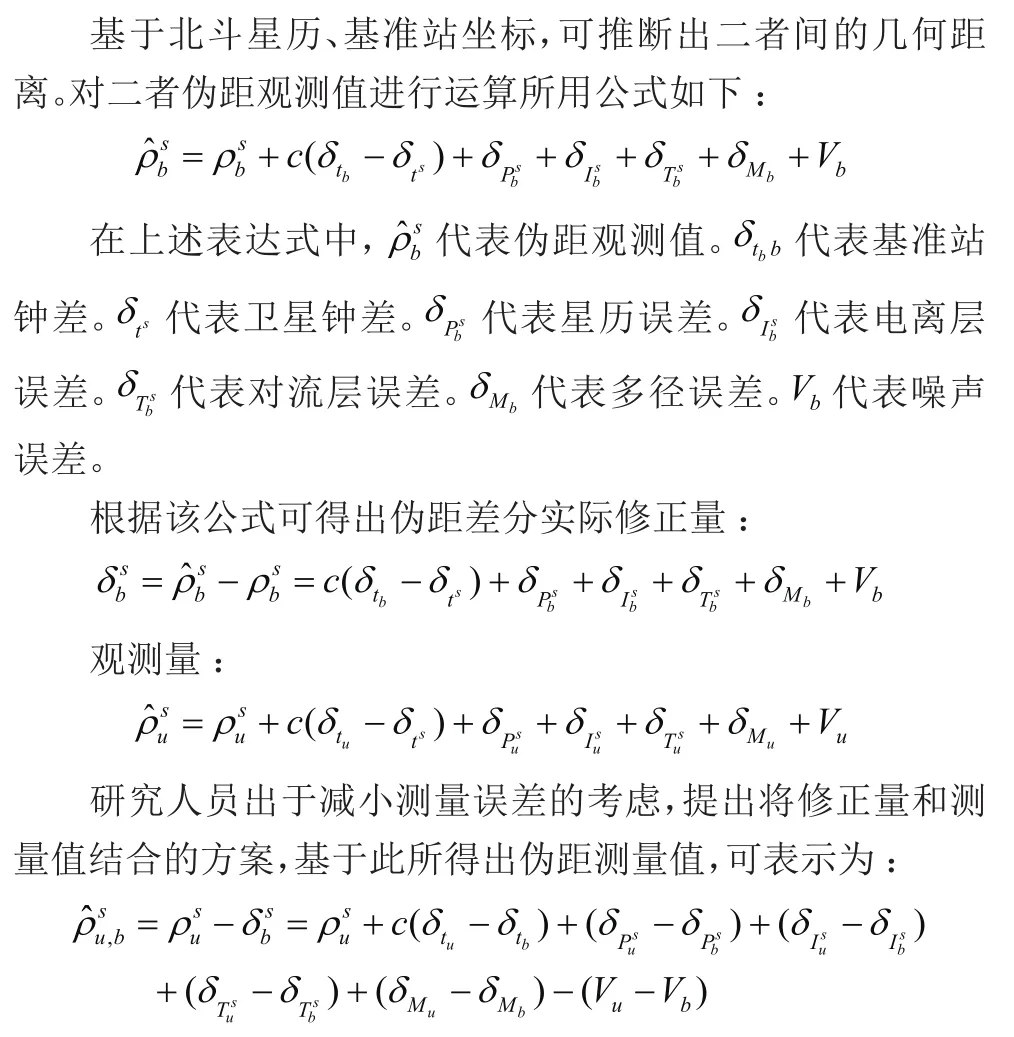
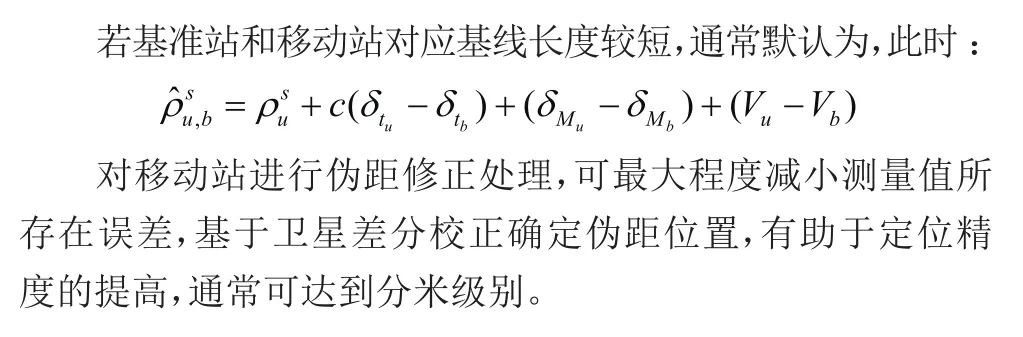
2.2 建立伪距差分模型
3 定位精度试验分析
3.1 搭建试验平台
研究人员以验证定位精度为目的,结合铁路维护作业特点,对动态跑车试验平台进行搭建,通过分析不同技术所展现出精度的方式,确定符合有关部门需求的定位方法。试验流程如下:第一步,确定无遮挡、视野开阔的场地;第二步,在已知点对接收机天线(基准站)加以固定;第三步,基于试验设备(跑车)对接收机天线(移动站)进行安装;第四步,提前开启接收机,经过10min的预热后,使试验设备沿规划路线匀速行驶;第五步,分别利用不同技术,对设备行驶30min内的位置及坐标进行记录。
3.2 分析试验结果
结合各技术所表现出定位精度(见表2)可知,关于水平定位,伪距差分的精度在0.8m左右,单点定位的精度在4.6m左右,本文所讨论技术的精度在0.03m左右。关于垂直定位,伪距差分的精度在2m左右,单点定位的精度在5.4m左右,本文所讨论技术的精度在0.03m左右。综上,伪距差分的精度单位为分米级别;单点定位的精度单位为米级,无法满足铁路维护作业要求;载波相位差分的精度单位为厘米级别,可为有关部门维护工作的开展提供帮助。

表2 各技术定位精度
4 结论
文章以铁路维护作业对定位精度所提出要求为落脚点,结合北斗卫星导航特点,借助动态跑车试验分析载波相位差分所具有定位精度。通过试验可知,常规伪距差分的定位精度约为0.8m,而垂直定位的精度约为2m,本文研究载波相位的精度约为3cm,定位精度提升明显,可最大程度满足铁路维护作业对精度所提出要求,其实际应用价值有目共睹。
猜你喜欢
军事文摘(2023年4期)2023-04-05
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
测控技术(2018年6期)2018-11-25
测控技术(2018年4期)2018-11-25
电子制作(2018年19期)2018-11-14
测绘科学与工程(2017年3期)2017-08-16
测绘通报(2016年12期)2017-01-06
电子制作(2016年1期)2016-11-07
系统工程与电子技术(2016年4期)2016-08-24
