新能源同步机低电压穿越的功角特性研究
2021-12-17 01:46付文启黄永章谷昱君
华北电力大学学报(自然科学版) 2021年6期
付文启, 黄永章,2, 管 飞, 杨 鑫, 谷昱君
(1.华北电力大学 新能源电力系统国家重点实验室,北京 102206;2.华电(烟台)功率半导体技术研究院有限公司,山东 烟台 264000)
0 引 言
随着能源转型的不断深入,电力系统正逐渐演变为高比例清洁能源和高比例电力电子装置的“双高”电力系统[1],规模化电力电子并网暴露出的惯量缺失、阻尼不足和故障电压穿越能力不足等问题威胁电力系统的安全稳定运行[2-4],如何统筹性解决这些问题成为了深化电力系统改革与实现碳中和的首要任务。针对以上问题,许多学者着眼于电力电子换流器控制的改造,如在补偿电网惯量和阻尼方面的虚拟惯量控制技术[5]、附加阻尼环节[6]和虚拟同步机控制技术[7,8]、在提高新能源故障电压穿越能力方面的模型电流控制技术[9]、虚拟阻抗控制技术[10,11]和虚拟磁链控制技术[12],尽管这些技术取得了一定效果,但换流器作为新能源与电网进行能量交互的节点,其本身存在的耐压耐流能力不足的问题[13,14],使得以上控制的改善效果有限。
同步电机有着对电网天然友好的优势,为此,文献[15]以同步电机理论为基础,提出新能源驱动新能源同步机(Motor-Generator Pair, MGP)系统并网的新方式,通过改变新能源与电网的能量交互节点解除换流器存在的物理限制,并凭借同步电机的优良属性弥补“双高”电力系统存在的不足;文献[16]通过实验验证了MGP能为系统提供真实的惯性响应,提高电力系统的频率稳定性;文献[17]通过对MGP进行小干扰建模,从理论推导和实验证明了双机励磁下的MGP具有比同质量块下单发电机更高的阻尼比,有利于系统的小干扰稳定,文献[18]根据MGP两端电压和电动势之间的相位关系,提出了一种源网相位控制策略,实现了新能源驱动MGP安全稳定并网;文献[19]阐述了MGP的电压隔离原理,并通过仿真和实验验证了MGP具有更强的故障电压穿越能力,但并未研究MGP在低电压穿越 (Low Voltage Ride Through , LVRT) 过程中的功角变化机理。
当发生系统性短路故障时,光伏直接并网实现 LVRT主要问题为如何稳定直流母线电压和防止短路过电流冲击[20,21],而MGP主体的同步电机具有足够的短路容量承受过电流,并且其电压隔离作用能保证光伏母线直流电压的稳定,因此MGP实现LVRT的主要问题已转变为MGP的功角稳定问题[22],文献[17]和文献[18]虽然对MGP的功角特性和小干扰稳定进行了研究,但并未进一步研究MGP在短路故障情况下MGP的功角变化特性和大干扰稳定,也并未考虑改进MGP控制以提升其暂态功角稳定能力。为此,本文首先考虑MGP的双机励磁特性,探究了MGP在系统短路故障下的功角变化机理,并在光伏经MGP并网的控制策略中引入电压反馈控制环以进一步提高MGP的暂态功角稳定性,在理论和仿真中与同惯性时间常数的单发电机的暂态功角稳定性进行了对比,得出MGP暂态功角稳定能力更强的结论,并对控制策略改进的作用进行了验证。为之后进一步研究新能源经MGP接入的电网大区域互联中机群摇摆问题提供了研究基础。
1 光伏经MGP并网系统和控制策略
1.1 MGP并网系统
MGP的主体由两台相同容量规格的同步电机构成,一台作为同步电动机(synchronous motor, SM),一台作为同步发电机(synchronous generator, SG),两台电机由一个机械联动轴串联在一起,并配备有各自的励磁系统,光伏经MGP并网的系统结构如图1所示。MGP的运行模式为:光伏发出的电能驱动MGP的同步电动机旋转,同步电动机再带动同轴旋转的同步发电机发电。光伏+逆变器+同步电动机的组合起着类似传统同步发电机组原动机的作用,因此,在机械轴的隔离作用下,MGP的发电机将承担电网故障下的大部分能量冲击,保证光伏和换流器的正常工作运行。
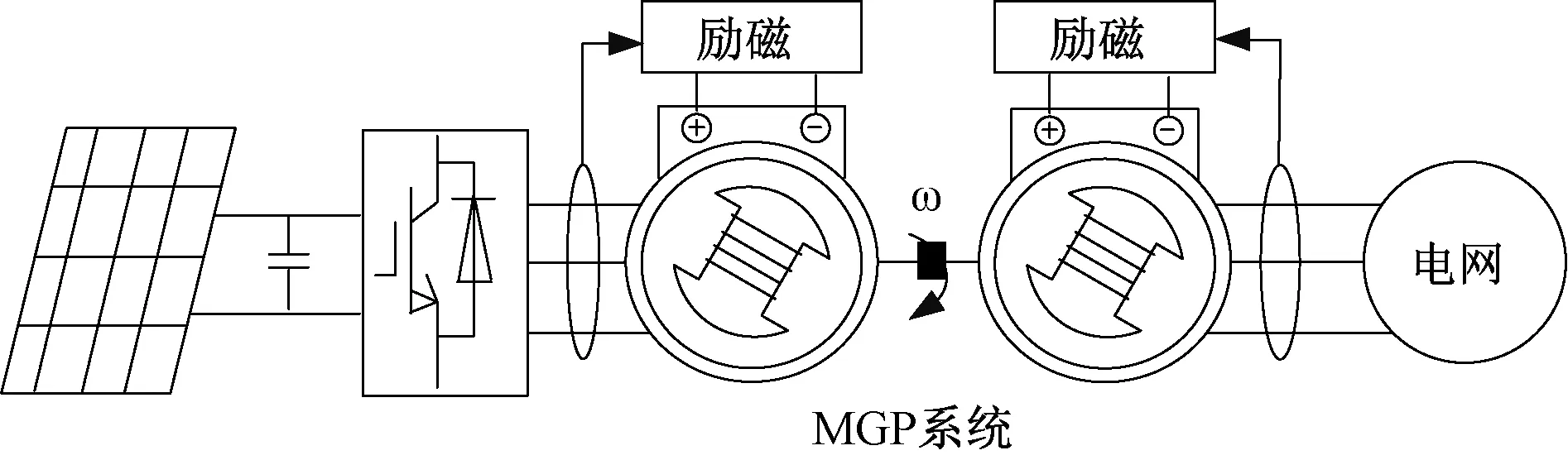
图1 光伏经MGP并网的系统结构Fig. 1 The system structure of PV integration by an MGP
1.2 直流电压反馈控制策略
光伏经MGP并网的直流电压反馈控制策略如图2所示,参考光伏阵列的P-V运行特性,根据光伏板运行状态和最大功率点追踪((Maximum power point tracking, MPPT)计算出给定直流母线电压Uref,以此为参考信号控制MGP输出功率,一旦系统发生扰动导致输出功率变化,光伏直流母线电压就会出现偏差ΔUdc,其偏差信号经PI调节后转变为换流器频率触发信号,通过改变输出电流频率进而控制MGP的电压相角差,最终实现对MGP输出功率的控制。
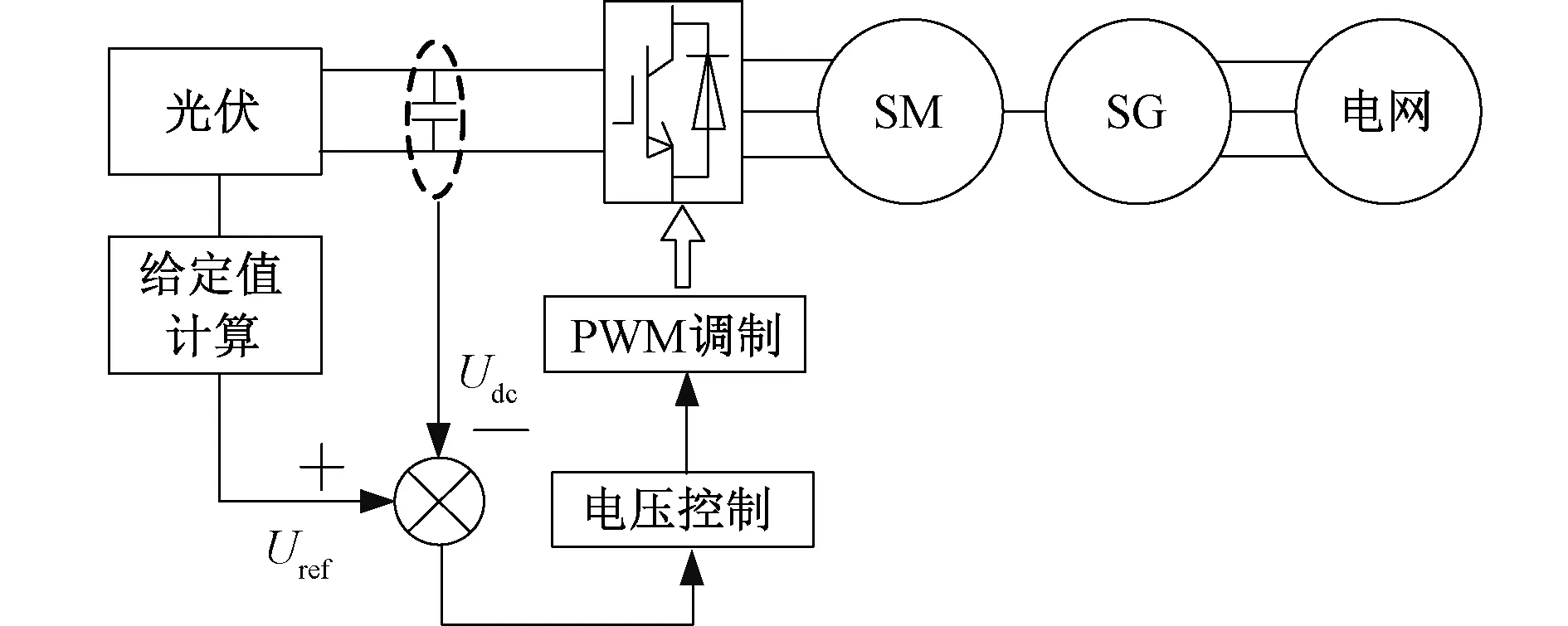
图2 直流电压反馈控制策略Fig. 2 DC voltage feedback control strategy
2 大扰动下MGP的暂态功角特性
2.1 MGP两端功角变化机理分析
MGP的同步电动机内电势ESM与端电压USM之间会形成一个功角δSM,同步发电机的内电势ESG与端电压USG之间也会形成一个功角δSG,如图3所示,由于两台电机同轴旋转,两个功角间又有相互的耦合作用,文献[17]已对传输功率改变下MGP的功角变化情况进行了分析,本文针对MGP发电机端电压突降情况来探究MGP的功角变化特性。

图3 双机功角示意图Fig. 3 Diagram of two synchronous motors′ power angle
根据MGP的功角特性关系,可得同步电动机和同步发电机的功率传输方程为:
(1)
(2)
式中:X′dM和X′dG分别表示同步电动机和同步发电机的暂态电抗。
在系统发生短路情况下,分析MGP的发电机,由式(1)可知,在新能源输入功率不变的情况下,发电机端电压USG突然减小,为保持PeG传输稳定,发电机功角δSG将拉大,但机械转矩依然大于电磁转矩,MGP的转子开始加速上升,发电机磁通量随之增大,由于电机加速,发电机主磁通增大,发电机内电势ESG也会适当增大,一定程度上遏制了δSG的增大趋势。
对于MGP电动机,转速上升后也会导致其主磁通增大,进而导致电动机内电势上升,由于联动轴的机械隔离作用[19],发电机端的电压变化并未对MGP电动机电造成直接影响,而电动机端电压USM表达式为
(3)
式中:id为电动机定子电流直轴分量。
电动机定子电流直轴分量与端电压的关系为
(4)
式中:X1=Xd″+XT,X2=XdM′+XT,X3=Xd+XT,Xd″、XdM′、Xd分别为发电机直轴次暂态电抗、直轴暂态电抗、直轴稳态电抗;Td″、Td′分别为发电机直轴次暂态短路时间常数、直轴暂态短路时间常量;Ta为定子绕组的非周期分量衰减时间常数;XT为恒定值,与系统结构参数有关,由于USM前面的系数基本不变,可以用一个常数K1来表示,则将式(6)带入式(5)中可得:
(5)
由于电动机侧为电流源型换流器而非强电网,USM将随ESM增大而增大,电动机的功角δSM将减小,但MGP的机械隔离作用隔离了发电机侧的电压骤降大扰动,因此电动机功角的变化幅度要低于发电机功角变化幅度。
综合以上分析,可得如图4所示的MGP在LVRT过程中的两端功角变化的示意图。
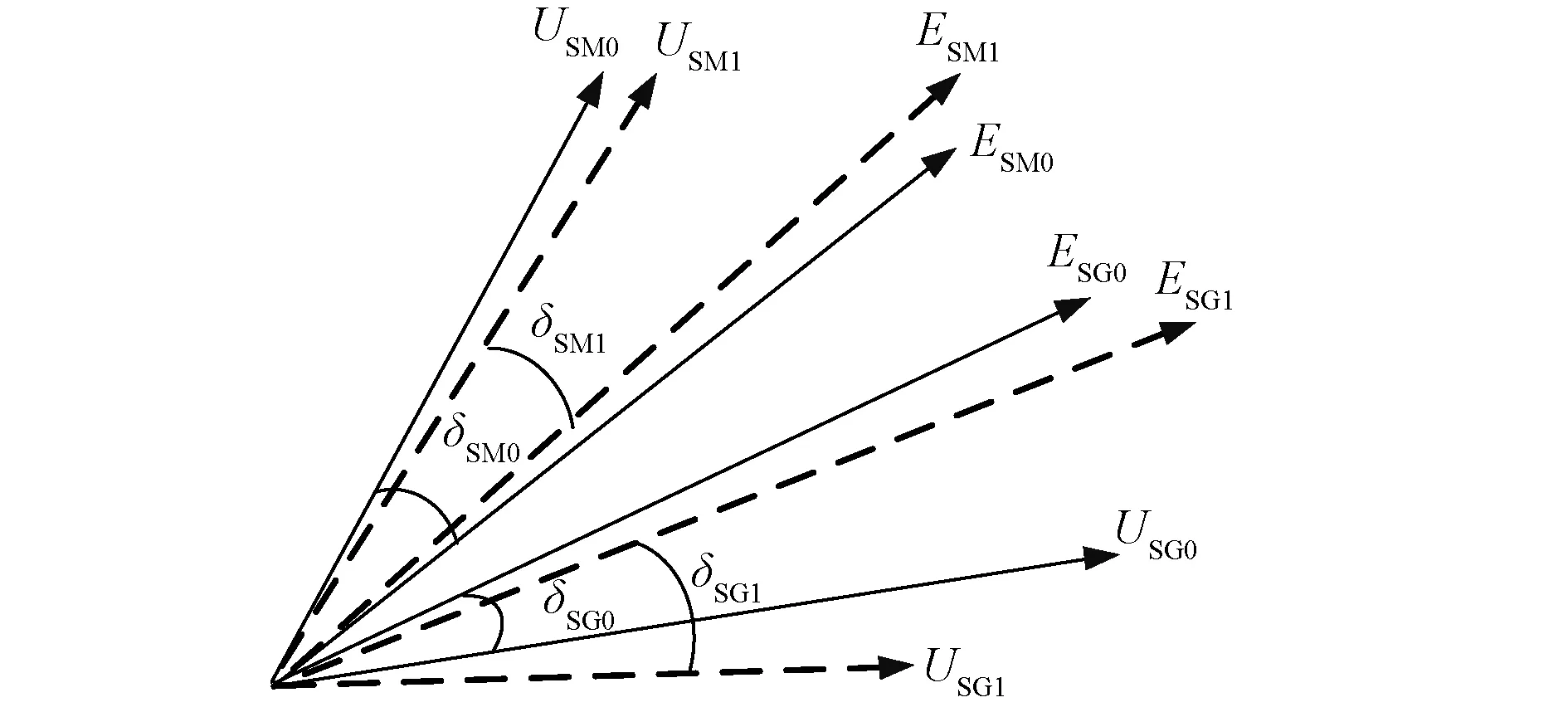
图4 低穿中MGP的功角变化Fig. 4 Power angle variations of MGP during LVRT
2.2 MGP的暂态功角外特性分析
光伏经MGP并网由于机械隔离的作用,在电网侧发生短路性故障而进入LVRT过程中时,MGP的发电机功角变化为主导作用,而电动机端功角则对发电机功角变化起着耦合影响的辅助作用。
设MGP两旋转刚体间无振荡现象,MGP的转子运动方程式为[16]
(6)
式中:MMGP为MGP惯性时间常数;TmG和TmM分别为发电机和电动机机械转矩;TeG和TeM分别为发电机和电动机电磁转矩;KDG和KDM分别为电动机和发电机的阻尼转矩系数;Δω为MGP转速偏差。
同步发电机和电动机的电磁转矩可线性化表达式为
(7)
(8)
式中:KsG和KsM分别为发电机和电动机同步转矩系数。
结合上一节的理论分析,将式(7)和式(8)带入式(6),并以变化量绝对值形式表示可得
(9)
在相同大干扰故障下,传统发电机的转子运行方程为
(10)
由式(9)和式(10)对比可知,若MGP与传统机组具有相同的惯性时间常数,在LVRT过程中MGP的双机励磁特性下的双机功角变化和双机阻尼作用能提供提供更大的电磁转矩和阻尼转矩,有效减小δSG增大的加速度,因而MGP具有更强的暂态功角稳定能力。
3 改进控制策略
电力电子换流器具有响应速度快的优势,由式(6)可知,减小MGP发电机功角变化速度既可以通过尽可能增大发电机电磁转矩实现,也可以通过减小发电机机械转矩实现,其原理类似于常规机组的快关汽门控制,但是与之不同的是,MGP发电机的机械转矩由电动机电磁转矩提供,而电动机电磁转矩可凭借换流器快速响应的优势实现迅速调节,开关控制速度远快于关闭汽门的机械控制速度,因而可作为提高MGP功角暂态稳定的常规手段。
建立光伏有功出力与MGP发电机端电压间的反馈关系,当发电机端电压下降时适当增大光伏直流电容电压以降低光伏输出有功功率;考虑若电压跌落时间过长,MGP在故障初期暂态时间内功角振荡,随后即使发电机端电压并未恢复也会进入稳定状态,此时应当输出功率应当恢复正常工作水平,因此引入MGP转速差信号以根据电机运行状态调整光伏输出功率。综上,在MGP的直流电压反馈控制策略中引入转速-电压双反馈控制环,改进后的控制策略如图5所示。

图5 改进后的控制策略示意图Fig. 5 Diagram of improved control strategy
由上图可知,当转速-电压双反馈控制环检测到发电机端电压降落量超过门槛后,该偏差信号将乘以控制系数KV转换为一个直流电压差值信号ΔUV,适当增大暂态过程中的直流电压,再经直流电压反馈控制对光伏输出有功进行适量下调,通过改变光伏运行点,最终改变MGP发电机的机械转矩。
引入的转速-电压双反馈控制环的控制系数表达式为
(11)
式中:ΔUDC表示直流电压变化量,ΔUAC与UN分别表示发电机端电压的变化量和额定值。
由光伏阵列直流电压变化引起的光伏输入到MGP电动机的电磁转矩变化量为
(12)
式中:K2是与光伏阵列当前运行点状态相关的系数;ω为MGP转速。
在引入转速-电压双反馈控制环后,将控制引起的电动机电磁转矩变化量单独列出,并以ΔTPV表示,则光伏经MGP并网在LVRT过程中的运动方程转变为
(13)
若下垂控制系数KV选取合理,由式(13)可知,转速-电压双反馈控制环的引入能进一步降低MGP在LVRT过程中发电机机械转矩与电磁转矩的不平衡度,增强其暂态功角稳定性。
4 仿真验证
为验证光伏经MGP并网的双机励磁效应和控制策略改善对其暂态功角稳定性的影响,搭建了如图6所示的单机无穷大系统,系统详细参数见表1,由于MGP本身功角的物理含义、动态过程和理论基础与传统常规机组是一致的,因此选取相同容量和相同惯性时间常数的火电机组进行比较,火电机组与MGP的电机参数和励磁方式一致,分别对比在50 s时,线路1发生三相短路后火电机组和控制改善前后光伏经MGP并网的暂态稳定性变化情况。
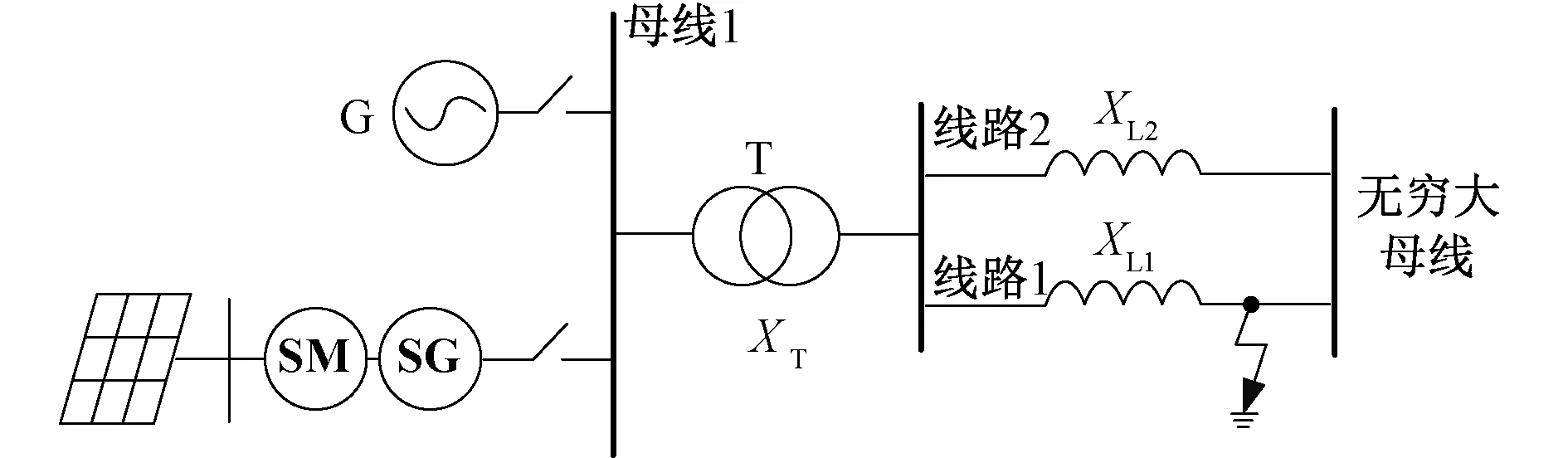
图6 单机无穷大仿真系统Fig. 6 Single machine infinite bus simulation system
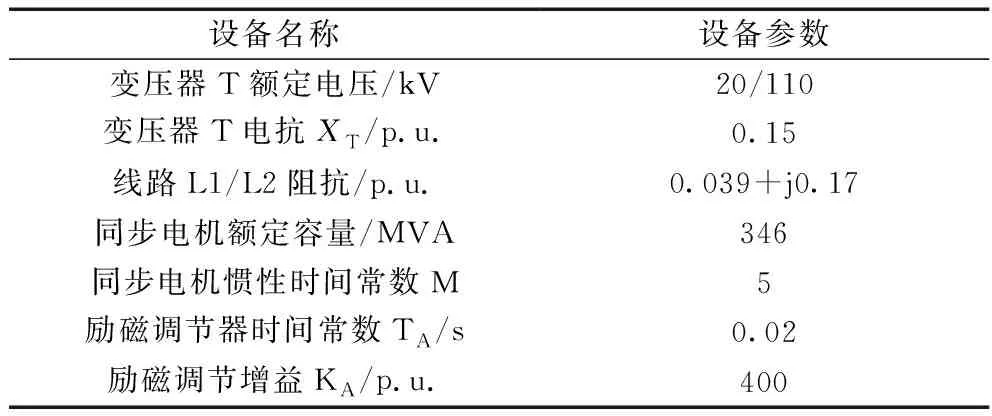
设备名称设备参数变压器T额定电压/kV变压器T电抗XT/p.u.线路L1/L2阻抗/p.u.同步电机额定容量/MVA同步电机惯性时间常数M励磁调节器时间常数TA/s励磁调节增益KA/p.u.20/1100.150.039+j0.1734650.02400
4.1 MGP双机励磁特性的影响
4.1.1 双机功角变化
在仿真中设置不同的短路故障持续时间(分别为0.1 s、0.3 s与0.5 s),对比MGP两端功角的变化情况(忽略两台电机间的初始转子角偏差),仿真结果如图7所示。

图7 MGP两端功角曲线Fig. 7 Power angle curve at both ends of MGP
由图7可知,短路瞬间MGP发电机端电压突降,发电机功角迅速增大,但是在MGP机械轴隔离作用的效果下,电动机的电动势和端电压并未受到电网电压扰动,电动机功角则相对慢速的变小,符合2.1节中对双机功角耦合作用的分析;随着故障持续时间加长,MGP两端功角的变化幅度增大,且功角振荡时间也变长。
4.1.2 与火电机组对比
不考虑控制改进作用,在仿真中设置短路故障时间持续0.5 s,对比光伏经MGP并网(图中表示为PV-MGP)和火电机组各状态量随时间的变化量,结果如图8所示。

图8 PV-MGP与火电机组对比Fig. 8 Comparison between PV-MGP and thermal power unit
图8中第一行两幅图为PV-MGP和火电机组发出的无功功率变化曲线和端电压有效值的变化曲线,由图可知两种情形下的发电机端电压降落量和无功响应能力基本相同;第二行中第一幅图为功率差ΔP(火电机组为发电机机械功率Pm与电磁功率Pe的差值,PV-MGP为忽略电机损耗情况下电动机电磁功率PeM与发电机电磁功率PeG的差值)的变化曲线,第二幅图为频率响应曲线,可知在双机励磁作用下,MGP有着更大的阻尼比和电磁转矩,有效抑制了功率差和频率变化曲线的摆幅,并且更快趋于稳定;第三行为PV-MGP与火电机组的发电机功角和变化曲线,MGP和火电机组发电机功角首摆幅值分别为44°和45°。综合可知,由于MGP大电磁转矩和大阻尼作用,相同故障情况下MGP的发电机功角首摆要小于火电机组,且功角振荡持续时间也更短。
4.2 控制改进作用的影响
对比PV-MGP加入电压反馈环前后,线路1短路持续0.5 s,不同控制系数KV对应的PV-MGP电气量变化曲线如图9所示。
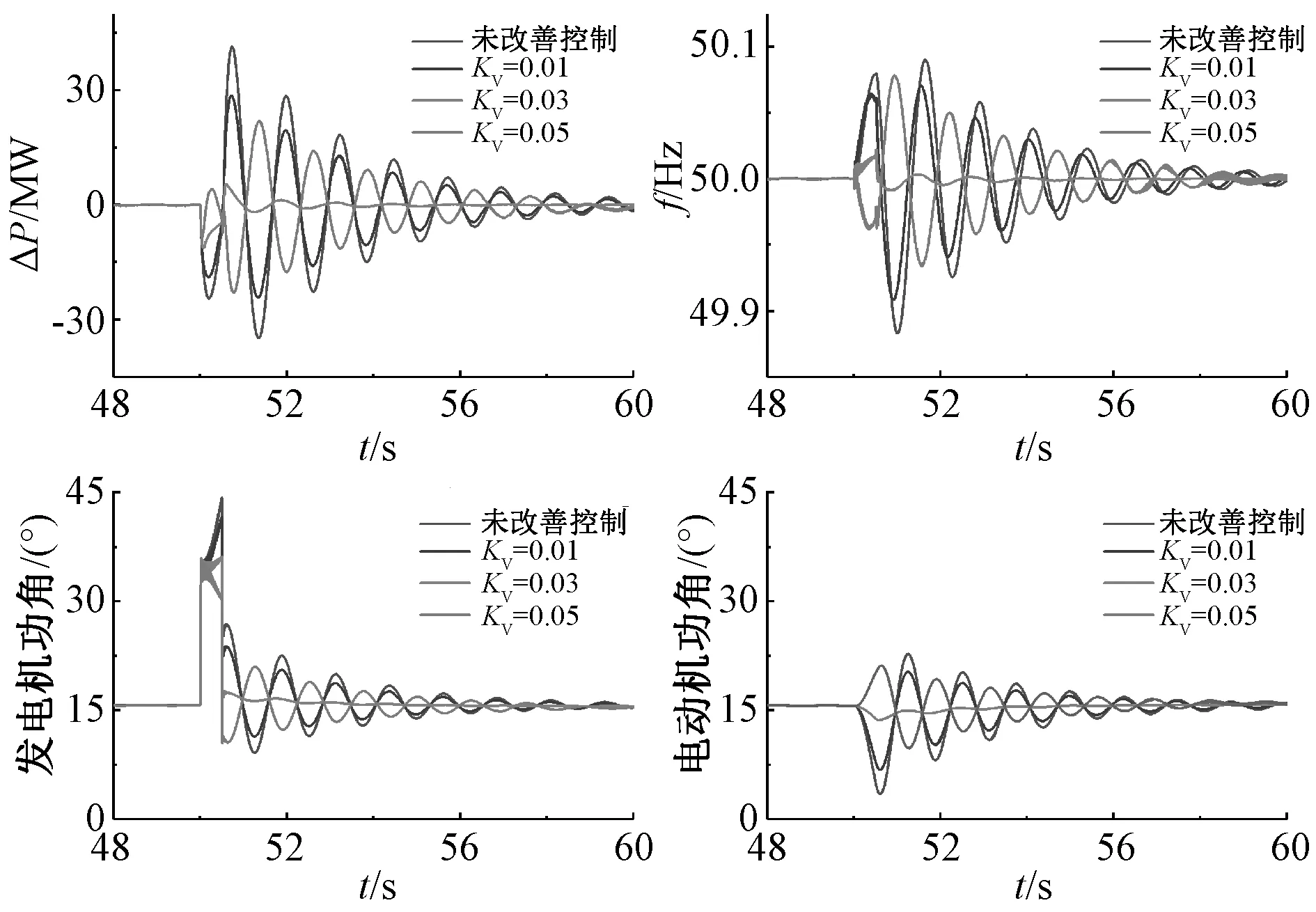
图9 控制策略改进前后对比Fig. 9 Comparison of control strategy before/after improvement
由图9可知,控制策略的改善对MGP两端功率差变化(忽略电机损耗)、频率响应和两台电机的功角响应都有着不同程度的改善作用,随着控制系数KV的增大,故障中PV的输出功率减发量增大,功率差ΔP首摆降低深度减小,频率f的首摆幅度也减小,MGP发电机的功角和电动机功角摆幅都得到相应降低。KV系数增大到0.03时,此时各曲线首摆幅度都得以有效改善,振荡衰减速度最快,各电气量的变化曲线综合表现最佳;当KV系数增大到0.05时,功率差ΔP首摆出现了反向加深现象,电网频率首摆也反向跌落,电动机功角拉大,但并未进一步改善发电机功角首摆幅值,各电气量的振荡衰减速度反而减慢。综合可得,引入直流反馈控制环后,随着控制系数KV的增大,PV-MGP的暂态功角稳定性呈先增强后变弱的现象,考虑换流器对PV功率突变的耐受限制,KV系数也并非越大越好。
5 结 论
本文首先阐述了MGP在LVRT中两台电机的功角变化情况,然后理论分析了MGP的双机励磁作用对光伏经MGP并网的暂态功角稳定性的提升原理,并对MGP并网控制策略进行改进。最后在单机无穷大仿真系统中对比了MGP和火电机组的暂态功角稳定,并通过仿真验证了控制策略改进对MGP功角稳定的提升作用,初步结论如下:
(1)在LVRT过程中,MGP的发电机功角增大,电动机功角减小,由于机械隔离作用,MGP在大电网中暂态功角外特性表现为MGP发电机功角的稳定。
(2)MGP在双机励磁作用下具有更大的阻尼比和电磁转矩,具有比同容量和同惯性常数的火电机组更强的暂态功角稳定性。
(3)光伏经MGP并网在引入转速-电压双反馈环后能进一步增强MGP暂态功角稳定性,但改善效果随控制系数KV的增大先变好后变弱,因而需要选择合适的控制系数。
猜你喜欢
电气传动自动化(2022年4期)2022-08-04
电气电子教学学报(2022年2期)2022-05-23
导弹与航天运载技术(2022年2期)2022-05-09
能源工程(2021年2期)2021-07-21
电加工与模具(2021年1期)2021-02-25
导航与控制(2021年6期)2021-02-18
船舶标准化工程师(2019年4期)2019-07-24
上海海事大学学报(2016年4期)2017-01-19
哈尔滨理工大学学报(2016年2期)2016-09-12
航空知识(2001年5期)2001-06-12