
基于车路协同功能的路侧及车载智能设备研究
2021-12-15 11:28范志恒廖湘荣
中国新技术新产品 2021年19期
华 伟 范志恒 廖湘荣
(深圳市金溢科技股份有限公司,广东 深圳 518000)
0 引言
长期以来,自动驾驶车主要依靠自身的能力对驾驶环境进行识别,由于所采用的信息采集设备(例如摄像头、激光雷达以及毫米波雷达等)的感知条件有局限性,因此会加大实现全工况无人驾驶的难度,导致交通事故频发。另外,感知设备的成本远高于市场可接受的范围,对自动驾驶汽车的总体成本造成影响,引发商业落地难等问题,影响了自动驾驶的发展进程。近年来,“聪明的车+智慧的路”逐渐被行业所认可,或成为未来自动驾驶发展的主要方向[1-3]。
“聪明的车+智慧的路”的工作模式离不开车联网,车联网作为物联网的主要应用领域,是信息化与工业化深度融合的重要方向。在车间与车路间的通信技术除专用短程通信技术(Dedicated Short Range Communication,DSRC) 外,还有以蜂窝网络为基础的C-V2X 技术。后者具有清晰的技术演进路线,其演进路线分为3个阶段,支持LTE-V2X 的3GPPR14、支持LTE-eV2X 的3GPPR15以及支持5G-V2X的3GPPR16,由我国政府和企业主导推进。其技术可直接应用于车载电子或路侧设备中,具有广阔的市场应用场景和良好的技术牵引力。将为车联网关键通信技术的发展提供支撑[4-5]。基于车用无线通信技术(vehicle to X,V2X)的电子终端的成功研发将会加速C-V2X 技术标准在车联网领域应用的成熟度和产业化进程。车联网关键技术分布在“端-管-云”3个层面,该项目是“端”层面,是实现车辆和路测设施智能化、网联化的关键点[6-7]。该文研究的基于LTE-V2X的车载智能设备和路侧智能设备可以支持实现自动驾驶车与道路基础设备的交互,为智能网联汽车获取超视距的环境信息提供支持,有助于保障道路交通的安全以及提高道路的通行率。
1 路侧智能设备开发
1.1 路侧智能设备架构设计
该文设计的路侧智能设备是在路端实现对道路交通云、边以及端进行协同控制的最小单元,具有通信、计算、存储以及控制等核心能力,通过有线或无线通信以及统一的逻辑架构实现完整的功能。路侧智能设备的功能架构如图1所示。
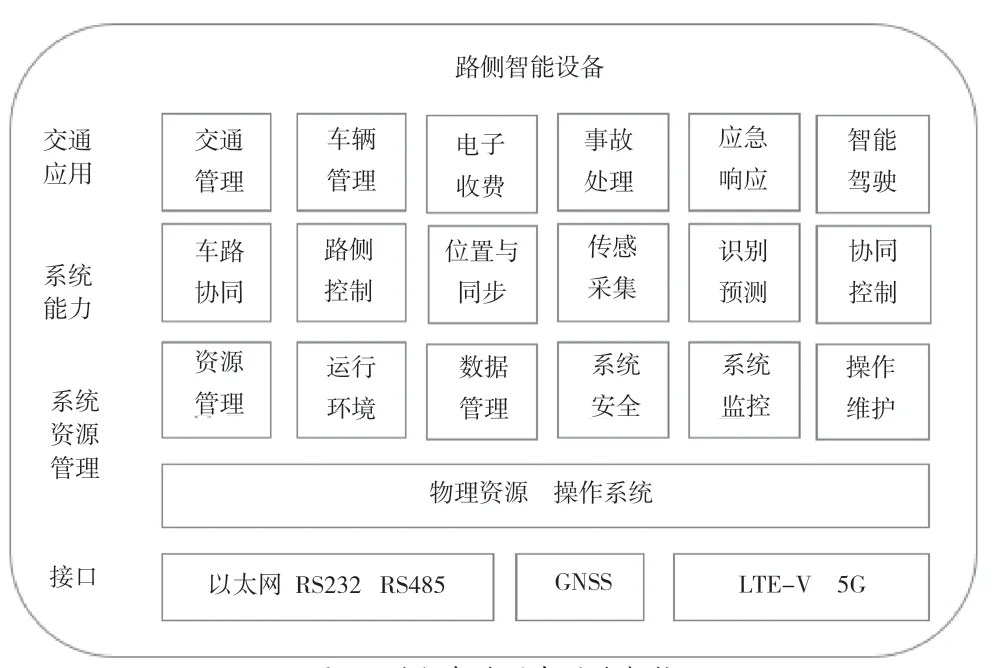
图1 路侧智能设备功能架构
路侧智能设备在车路交互方面提供LTE-V2X、5G双网路通信,能够实现通信的低时延与高带宽。在接入方面,可以通过边缘计算单元实现路侧基础设施感知、交通运行感知、交通气象环境感知以及路侧可变标志等的接入与管理。汇集上述所有信息并接受来自云端控制平台的远端信息、控制指令后,路侧智能设备将完成区域内应急信息的快速发布、控制指令的分发以及融合数据处理任务,同时,路侧智能设备具备接收周边其他路侧智能设备信息的能力,可以快速传递和发布周边紧急事件的相关信息。
1.2 路侧智能设备硬件设计
该文设计的路侧智能设备采用LTE-V2X专用短程通信,工作于5.905 GHz~5.925 GHz专用频段,满足3GPP LTE Release 14标准,主要由中央处理器、LTE-V2X模组、GNSS模组、5G模组、Wi-Fi模组、千兆以太网、RS232/RS484接口以及电源模块等部分组成。可以安装于道路、交通路口、停车场、机场以及高速公路等场景,用于实现车路协同与辅助自动驾驶的功能。
路侧产品采用高性能处理器,内置高精度定位模块,除LTE-V/DSRC通信以外,还具备4G通信、Wi-Fi和蓝牙(Bluetooth)等无线通信功能,提供RJ45以太网和RS232通信接口,能全面满足各种通信需求,支持直流供电与POE供电2种模式。
1.3 路侧智能设备软件设计
路侧智能设备采用Linux操作系统,是一个基于POSIX和Unix的多用户、支持多线程和多CPU的操作系统。软件通过层次化的设计实现设备与资源的抽象和管理。系统的支撑与管理功能包括数据管理、系统安全管理、系统监控以及操作维护等功能。路侧智能设备软件采用分层设计,分为驱动层、协议层和应用层,如图2所示。
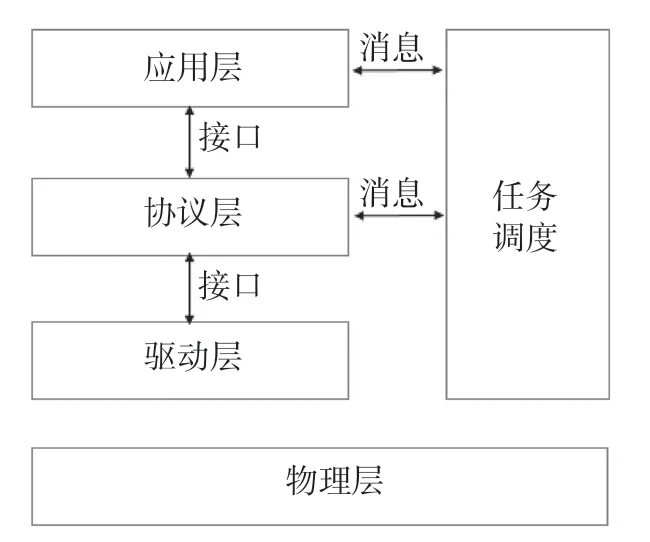
图2 路侧智能设备软件设计框架
路侧智能设备软件采用分层设计,分为驱动层、协议层和应用层。驱动层与硬件布局接线相关,对上层提供统一的I/O功能,屏蔽硬件上的细节信息。协议层包括应用层消息收发/解析功能、网络层(UDP、TCP、IP、串口通信等)消息收发/解析功能。应用层实现路侧智能站系统能力、操作维护管理等功能。
2 车载智能设备开发
2.1 车载智能设备架构设计
车载智能设备通过LTE-V2X专用短程通信网络与路侧智能设备或其他车辆通信。获取路侧信息或他车信息,并将该车的信息发送给路侧智能设备和其他车辆,实现车车、车路协同控制。智能车载设备通过5G网络与交通控制中心联接,实现车辆状态信息上传、道路状况分析以及智能驾驶辅助等功能。智能车载设备功能架构如图3所示。
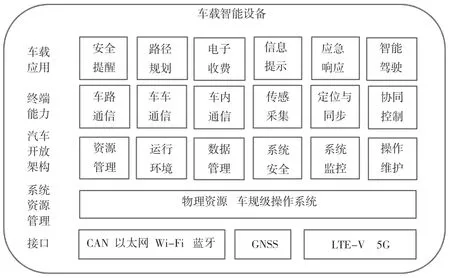
图3 智能车载设备架构
2.2 车载智能设备硬件设计
该文所设计的车载设备是连接路端和车端、车端和车端的通信设备。具有通信、计算、存储以及控制等核心能力,设备工作于5.905 GHz~5.925 GHz专用频段,通过有线或无线通信以及统一的逻辑架构实现完整的功能。除中央处理器外,还集成了LTE-V2X模组、5G模组、GNSS模组、以太网Switch、CAN、Wi-Fi和蓝牙等丰富的接口及其他通信方式扩展。支持国标ITS协议栈,可接收、储存并实时更新车辆的行驶数据,包括当前车速、行驶方向、油门深度以及车距等,向其他车辆或者路侧智能设备发送当前行驶状态数据;接收路侧智能设备发送的交通事件、交通管理的信息,达到危险预警、安全高效驾驶以及辅助自动驾驶的目的。
车载设备的LTE-V2X模组用于与其他设备进行专用短程通信,实现车路协同应用。5G通信模块主要用于设备与服务器或云端的通信、OTA升级和T-BOX应用。CAN接口内置2路CAN接口,分别为低速CAN接口和高速CAN接口,低速CAN接口用于CAN唤醒和低速通信应用。高速CAN接口用于高速通信应用。Wi-Fi 6除提供车内热点外,也可以进行基于Wi-Fi的无线升级。车载智能设备内置Switch,可扩展1路车载以太网和多路千兆以太网接口,保障设备与汽车车机、中控以及多类型传感器的通信,将安全预警信息传递给汽车中控,接收汽车中控下发的控制命令,也可用于多传感器信息的融合。定位模组可以接收卫星定位信号,向上层提供UTC时间及地理位置信息,提供与UTC整秒对齐的高精度秒脉冲。车载设备设计有硬加密模块,可保障数据通信的安全。
2.3 软件设计
车载智能设备软件采用分层设计,分为驱动层、协议层和应用层。驱动层与硬件布局接线相关,为上层提供统一的I/O功能,屏蔽硬件上的细节信息。协议层具有应用层消息收发/解析功能、网络层(UDP、TCP、IP、串口通信等)消息收发/解析功能。应用层具有实现车载智能设备系统能力、操作维护管理等功能,应用层主要分为2个部分,一部分作为基础子系统,集合了更上层应用的公共部分,为这些应用提供交互接口,以便自由组合使用;另一部分使用基础子系统提供的服务,构建直接面向用户的车辆安全、车路协同以及T-BOX类应用。车载智能设备软件设计框架如图4所示。
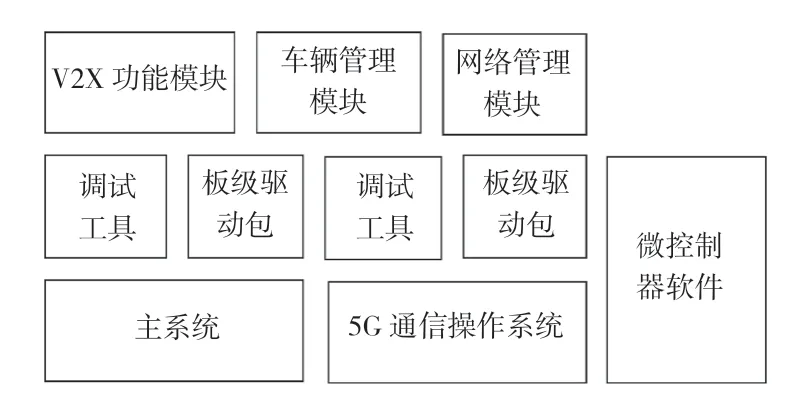
图4 车载智能设备软件设计框架
3 试验场功能测试
3.1 通信性能测试
为测试、验证集成多种通信方式的车路协同路侧智能设备和车载智能设备的交互功能,在深圳市坪山试验场开展了路侧智能设备安装搭建、车辆及车载智能设备环境搭建、定位基站搭建以及配套网络环境与外场环境测试,进行了车路交互实地测试,以验证V2X应用在不同通信环境、距离等条件下通信时延、丢包率等性能。
3.1.1 测试方案
设备性能测试主要测试集成多通信方式的车路协同路侧智能设备与车载智能设备在不同场景下的通信交互性能,包括信号强度、通信时延以及数据丢包率等指标。采用的测试工具见表1。

表1 测试工具表
测试设备发出的信号:丢包、延时测试方案测试LTEV2X端到端的时延和丢包率,将OBU和RSU连接GNSS天线和V2X天线,按照方案开展测试。
3.1.2 测试结果及讨论
表2为在空旷地带的测试结果,按照OBU远离和靠近RSU的方式分别测试多组时延数据。

表2 1 400 m测试结果示意图
试验表明,在空旷地带超过1 000 m就无法收到数据,延时增大,数据无法接收,1 000 m以内平均时延小于50 ms。
表3为空旷地带的测试结果,按照OBU远离和靠近RSU的方式分别测试多组丢包率数据。

表3 超过1 000 m测试结果示意图
试验表明,超过1 000 m的丢包率大于5%,影响数据正常通信,小于1 000 m的丢包率小于0.1%。
3.2 业务通信测试
3.2.1 测试方案
针对路侧消息、车辆消息、地图消息以及中心系统消息等进行道路施工事件、拥堵事件、车辆故障(异常状况)事件以及气象事件等场景的交互测试,主要开展了业务成功率测试和通信距离移动测试。业务成功率和通信距离移动性测试步骤如下:1)车辆从1 000 m的位置向RSU方向行驶,速度为120 km/h,接收RSU事件,根据OBU日志、RSU日志以及卫星定位信息进行比对,测量不同通信距离OBU和RSU的业务成功率(采样点间隔不大于50 m)。2)RSU在1 s内分别进行5次不同的车路一体化业务,重复上述步骤。
重复测试(至少重复测试10次)。
3.2.2 测试结果
车速为120 km/h时,不同距离区间的车路交互业务成功率见表4。
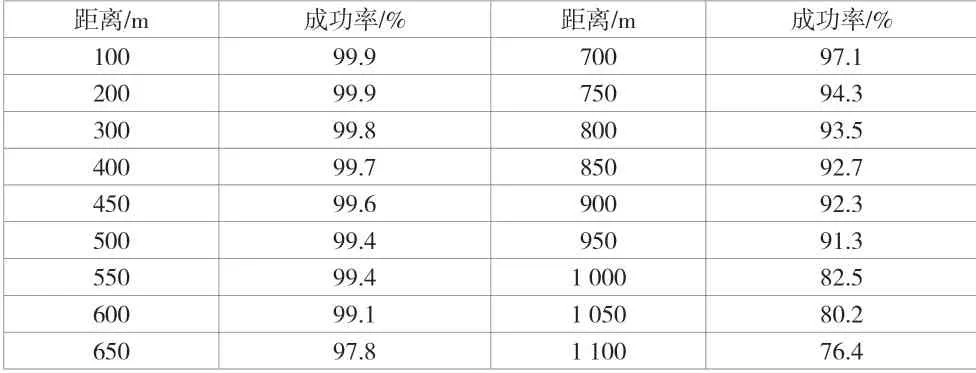
表4 120 km/h业务成功率
实验结果表明,在120 km/h的速度下,车路交互距离保持在600 m以内其成功率大于99%。
4 结论
该文研究结果表明,具有车路协同功能的车载智能设备和路侧智能设备可以通过信息交互来获取自动驾驶车视距之外交通环境信息。考虑设备通信环境和车辆行驶速度,设备在通信距离为500 m的范围内可以实现高效的业务信息交易,信息丢包率小于0.1%,端到端通信时延小于50 ms,可以满足L4级的自动驾驶通信需求。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
计算机与数字工程(2022年1期)2022-02-16
汽车观察(2019年2期)2019-03-15
电讯技术(2018年10期)2018-10-24
中国交通信息化(2018年12期)2018-03-21
教育教学论坛(2016年49期)2017-02-27
电测与仪表(2016年21期)2016-04-11
铁道科学与工程学报(2015年4期)2015-12-24
物联网技术(2015年8期)2015-09-14
中国神经再生研究(英文版)(2014年11期)2014-01-22
