
北斗三号新信号体制共视时间比对*
2021-12-14 12:49:34张继海董绍武袁海波赵书红王威雄
国防科技大学学报 2021年6期
张继海,董绍武,袁海波,广 伟,赵书红,王威雄
(1. 中国科学院国家授时中心, 陕西 西安 710600; 2. 中国科学院大学, 北京 100049; 3. 中国科学院时间频率基准重点实验室, 陕西 西安 710600; 4. 中国科学院大学 天文与空间科学学院, 北京 100049)
国际权度局(Bureau International des Poids et Mesures, BIPM)利用GPS共视(Common View, CV)时间比对方法开展国际上守时实验室间的高精度时间比对并用于国际原子时(International Atomic Time, TAI)的计算始于20世纪80年代[1-2]。同时,该方法也被广泛应用于本地时间与国家标准时间的同步。随着卫星导航技术的发展,为了提高国际原子时计算的稳定性与可靠性,2009年国际时频咨询委员会(Consultative Committee for Time and Frequency, CCTF)建议利用多方法远距离时间比对技术进行国际原子时的计算,并互相形成冗余备份,以提高计算的准确性和可靠性。目前,在国际计量局每月发布的Circular-T公报中,仅包含了GPS系统时间GPST以及GLONASS系统时间GLNT相对于国际标准时间——协调世界时(Universal Time Coordinated, UTC)的时差监测结果供用户使用以及开展相关的科学研究。我国自主设计与建设的北斗三号全球卫星导航系统于2020年7月31日正式开通服务,其包含3颗地球同步轨道卫星、24颗中圆地球轨道卫星以及3颗倾斜地球同步轨道卫星,为全球用户提供高质量的定位、导航与授时(Positioning, Navigation and Timing, PNT)服务[3-4]。2017年在法国巴黎举办的第21届CCTF大会上,相关专家学者也建议尽快将北斗系统纳入国际原子时的归算中,并与其他卫星导航系统形成冗余备份。早在2015年,BIPM的Defraigne和Petit在基于卫星导航系统标准共视时间比对(Common GNSS Generic Time Transfer Standard, CGGTTS)的参考下,发表了关于扩展CGGTTS共视文件时间传递标准的文章[5],统一了多系统标准共视时间传递规范(CGGTTS-V2E),并将全球四大导航系统以及日本准天顶卫星系统(Quasi-Zenith Satellite System, QZSS)纳入标准规范中,用于全球守时实验室间开展常规的时间比对以及相关研究的标准。但该标准中,利用我国北斗系统卫星观测数据生成的CGGTTS标准共视文件是基于北斗二号信号频点(B1I & B2I)的数据。因此,随着我国北斗三号系统及其新频点信号的建设与广泛应用,基于北斗三号新信号体制时间比对的研究会成为国际计量局未来开展北斗共视时间比对的必然趋势。
本文基于我国时间基准UTC(NTSC)系统以及捷克国家时间基准UTC(TP)系统之间的比对链路,在CGGTTS-V2E文件标准的指导下,开展北斗三号信号(B1C & B2a)共视时间比对试验,分别对信号观测质量、零基线以及亚欧长基线时间比对钟差相对于北斗二号信号(B1I & B2I,B1I & B3I)的提高进行了验证与分析。该试验也为基于北斗三号信号体制的远距离时间比对参与国际原子时的计算提供了可靠的技术与试验基础,同时也进一步增强了基于北斗系统高精度时间比对方面的应用。
1 北斗共视数据产生与比对原理
以本地守时实验室的UTC(k)为参考信号,接收机通过直接接收北斗广播信号开展北斗三号信号共视时间比对研究,其原理链接如图1所示[6-7]。

图1 接收北斗广播信号法Fig.1 Method of receiving BDS broadcast signal
本地卫星观测以及数据采集如图1所示,数据采集模块实时存储所观测到北斗系统卫星的观测值,因此一般原始观测方程[8]可描述为:
(1)

1.1 电离层时延修正
对于B1C和B2a信号的双频用户,采用双频无电离层组合伪距来修正电离层延迟的影响,其计算方法[9-10]为:
(2)
PCB1Cp-B2ap=ρ+c(dtr-dTs)+dtrop-
(3)
式中,DCB(P1P3)=C1P-C6I,DCB(P2P3)=C5P-C6I,其中C6I为北斗B3频点的伪码观测数据。
1.2 卫星钟差修正
卫星钟差修正可利用二次模型进行修正,其表达式如式(4)所示[9]。
Δtsv=a0+a1(t-toc)+a2(t-toc)2+Δtr
(4)
式中:Δtsv为卫星测距码相位时间偏移(s);a0,a1,a2分别为卫星钟时间偏差(s)、卫星钟频偏(s/s)以及卫星钟频漂(s/s2);t为信号发送时刻卫星测距码相位时间;Δtr为相对论修正项,其值为
(5)

1.3 对流层时延改正
参照BIPM发布的标准共视规范(CGGTTS-V2E)文件,对流层时延修正利用NATO模型[5],其表达式如式(6)所示。
Δttropo=f(E)·ΔR(h)
(6)
式中:E为卫星方向高度角,
(7)
ΔR(h)为天顶方向对流层总时延,h为接收天线的海拔高度(km),ΔR(h)可以利用式(8)计算。
(8)
其中,Ns=324.8,ΔN=-7.32e0.005 577Ns,Nslog=ln[(Ns+ΔN)/105]。
基于BIPM发布的关于标准共视(CGGTTS-V2E)时间传递规范,北斗标准共视(CGGTTS格式数据)数据处理方法可描述为接收机连续跟踪16 min(其中前2 min为接收机捕获卫星阶段,中间13 min为接收机连续跟踪卫星并采集观测值,后1 min为数据处理阶段)的卫星测量数据,其中对13 min可视范围内所有北斗卫星,利用采集的伪距值对每颗卫星的卫星钟差项、接收机误差项以及信号传播路径上的各项时延进行修正,获得每秒下通过单颗卫星计算得到的本地时与北斗卫星导航系统时间(BeiDou navigation satellite system Time, BDT)之间的偏差,最后将单颗星解算的780个连续的时差值按照CGGTTS-V2E标准规范进行拟合,取中间点处的钟差值作为当前16 min下的本地时与BDT的偏差。其数据算法处理过程描述如图2所示[5, 11-12]。
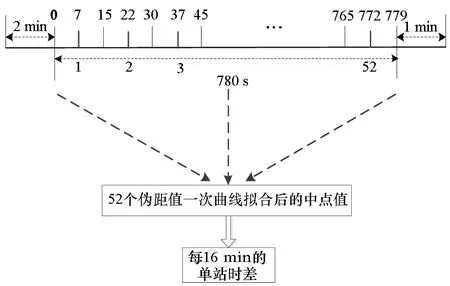
图2 北斗标准CGGTTS产生过程Fig.2 Standard CGGTTS generation process of BDS
基于上述所描述的算法流程,利用本地所观测到的北斗RINEX观测文件以及导航电文文件,解算出北斗二号信号以及北斗三号信号的标准CGGTTS共视文件,并开展两地基于北斗导航系统的共视时间比对,其比对原理如图3所示。
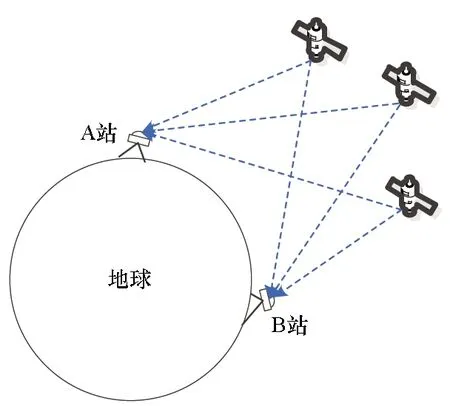
图3 北斗共视时间比对法Fig.3 Method of BeiDou common view time comparison
北斗共视算法可描述为:设A站的时间为tA,B站的时间为tB,北斗系统时间为BDT[11]。
ΔtA=tA-BDT
(9)
ΔtB=tB-BDT
(10)
式(9)减式(10)即可得到两观测站的时间偏差:
ΔtA-ΔtB=tA-BDT-tB+BDT=ΔtAB
(11)
2 试验结果分析
利用放置于我国时间基准系统以及捷克时间基准系统中的GNSS多系统时间传递型接收机采集输出的观测值,开展北斗三号信号共视时间比对研究,并对数据处理的结果进行分析与验证。
表1为试验中各守时实验室中所用到的接收机类型及其天线。

表1 实验室中所用的接收机
2.1 观测信号质量分析
2.1.1 伪距多路径噪声
在基于伪距的时间比对中,多路径效应是指本地观测站天线除了接收到一个GNSS卫星发射的电磁波信号外,还可能会接收到若干个该信号经天线周围建筑、树木等物体反射或折射回的信号,这些非直线路径信号会使接收机得到的信号失真并导致码伪距和相位测量错误[13-16]。在此,利用伪码和载波相位观测无电离层组合观测值估算出多路径所带来的误差噪声影响,其表达式[17]可描述为:
(12)
式中,下角标i和j为不同频点,MPj为伪距多路径组合(单位:m),λi和λj为波长,fi和fj为载波频率,φi和φj为载波相位观测值,Pj为伪距观测值,Bij为模糊度。
利用2020年4月15日—2020年4月24日我国时间基准系统中接收机采样间隔为300 s的北斗二号信号频点(B1I、B2I)以及北斗三号信号新频点(B1C、B2a)的伪距以及载波相位观测数据,分别对可视范围内的所有北斗卫星开展多路径噪声影响分析。

图4 北斗B1I及B1C频点多路径噪声Fig.4 Multipath noise of B1I and B1C
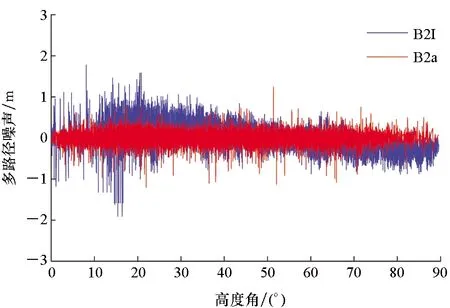
图5 北斗B2I及B2a频点多路径噪声Fig.5 Multipath noise of B2I and B2a
图4和图5分别为北斗B1I、B1C以及B2I、B2a不同频点的多路径噪声随卫星高度角的变化情况。由此可见,北斗三号信号引起的多路径噪声要小于北斗二号信号引起的多路径噪声,且北斗三号引起的多路径误差噪声相对于北斗二号较平稳。
2.1.2 北斗信号信噪比
开展远距离时间比对的信息都是基于本地接收机解算的GNSS卫星空间信号,通常利用信噪比(Signal-to-Noise Ratio, SNR)来衡量空间信号的好与坏,并间接反映测距的精度。SNR定义为接收到的信号功率PR与信号噪声功率N=kTBn之间的比率,如式(13)所示[18-19]。
SNR=PR/(kTBn)
(13)
式中:k为玻尔兹曼常数,其值为1.38×10-23J/K;T为噪声温度,单位为K;Bn为噪声带宽,单位为Hz。
利用2020年4月15日—2020年4月24日我国时间基准系统中接收机采样间隔为300 s的北斗二号信号频点(B1I、B2I)以及北斗三号信号频点(B1C、B2a)的观测数据,分别对可视范围内的所有北斗卫星开展信噪比分析。

图6 北斗B1I及B1C频点信噪比Fig.6 SNR of B1I and B1C
图6和图7分别为北斗B1I、B1C以及B2I、B2a不同频点的信噪比随卫星高度角的变化情况。从图中可以看出高度角越大,则信号信噪比越高,B1I和B1C的信噪比分别保持在20~50 dB-Hz以及25~52 dB-Hz,B2I和B2a的信噪比分别保持在20~53 dB-Hz以及25~53 dB-Hz;B1C频点的信噪比要高于B1I,B2a频点的信噪比在高度角大于50°时要高于B2I。

图7 北斗B2I及B2a频点信噪比Fig.7 SNR of B2I and B2a
2.2 北斗三号信号体制共视时间比对
2.2.1 北斗三号零基线共钟比对
利用守时系统中的两台同源GNSS接收机2020年4月15日—2020年5月10日的RINEX多系统观测数据,开展零基线同源时间比对(Common Clock Difference, CCD)实验研究[20-21],两台接收机外接UTC(NTSC)信号源,同时接收机各自外接自带天线,接收机连接原理如图8所示。
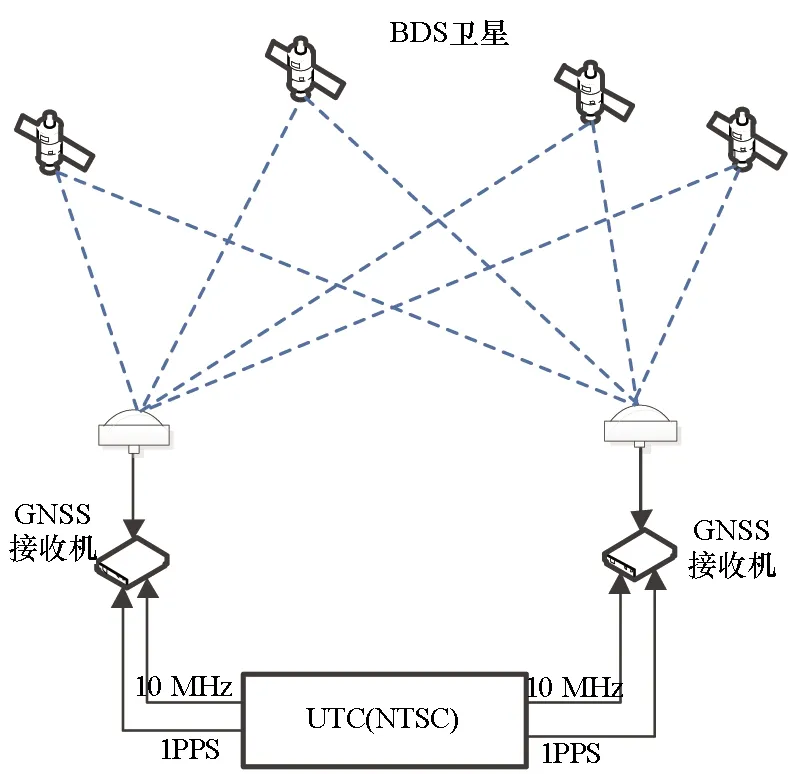
图8 接收机连接原理Fig.8 Principle of receiver connection
如图8所示,两台接收机天线的直线距离为5 m以内,且在零基线时间比对中,由于外接相同的时间频率源, 因此一次差分可以消除大部分原子钟所带来的噪声影响[8, 22],进而能够直接反应出时间比对的性能。此方法也被BIPM用在全球时间比对链路相对校准中。
如图9所示,利用北斗三号新频点信号双频组合解算的零基线钟差波动基本在±1 ns以内,北斗二号信号双频组合钟差的零基线结果波动在±2 ns以内,且北斗三号零基线钟差的噪声明显小于北斗二号。钟差的标准差(STandard Deviation, STD)如表2所示。
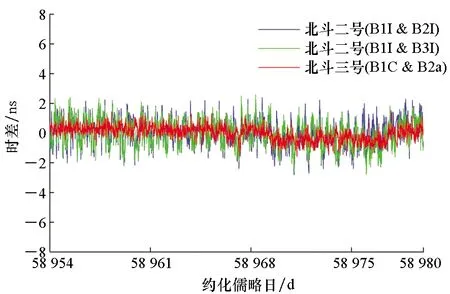
图9 北斗二号和北斗三号零基线钟差比对结果Fig.9 Result of CCD in BDS-2 and BDS-3

表2 北斗零基线钟差标准差
通过表2可以看出,北斗三号B1C和B2a频点组合的零基线钟差的标准差最优,且B1C和B2a频点组合的零基线钟差的标准差相对于北斗二号B1I和B2I频点组合提高了44.24%,相对于北斗二号B1I和B3I频点组合提高了43.59%。

图10 GNSS四系统零基线钟差比对Fig.10 CCD of four systems of GNSS
图10为利用北斗三号以及其他三大导航系统的零基线比对钟差。从图10可以看出,四系统零基线钟差结果具有较好的一致性(为了能够直观地看出对比结果,将基于GPS、GLONASS以及Galileo系统的钟差进行了平移,平移后的钟差在时间比对方面不影响比对钟差的稳定度以及不确定度等)。表3为利用不同系统开展零基线比对钟差的标准偏差。
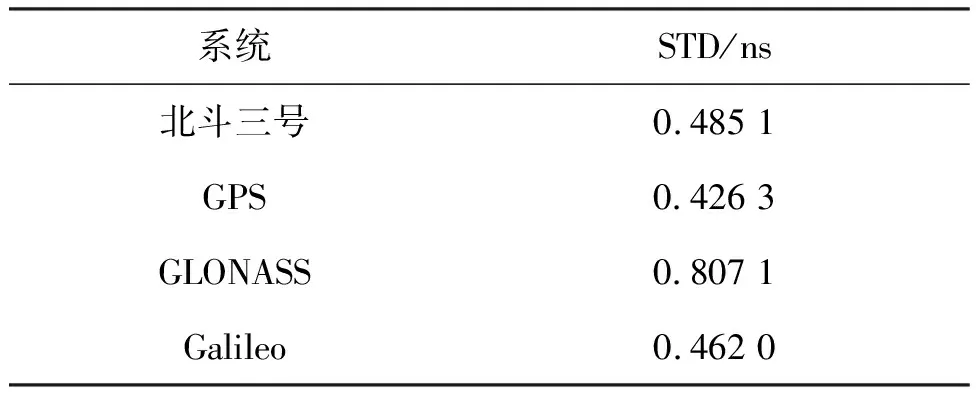
表3 四系统零基线钟差标准差
通过表3可以看出,四系统零基线比对钟差的标准差均优于1 ns,且北斗三号信号的零基线钟差的标准差与GPS系统以及Galileo系统相当。
2.2.2 北斗三号长基线共视时间比对
利用2020年4月15日—2020年5月10日的北斗RINEX观测数据,分别基于北斗二号信号无电离层组合以及北斗三号信号无电离层组合开展中捷远距离北斗共视时间比对(两守时实验室之间的距离约为7 058 km),并与其他三个卫星导航系统进行对比。
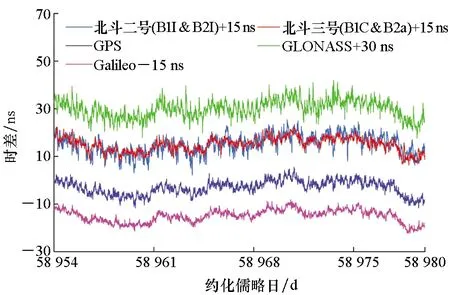
图11 基于GNSS四系统的共视时间比对Fig.11 Common view time comparison based on four systems of GNSS
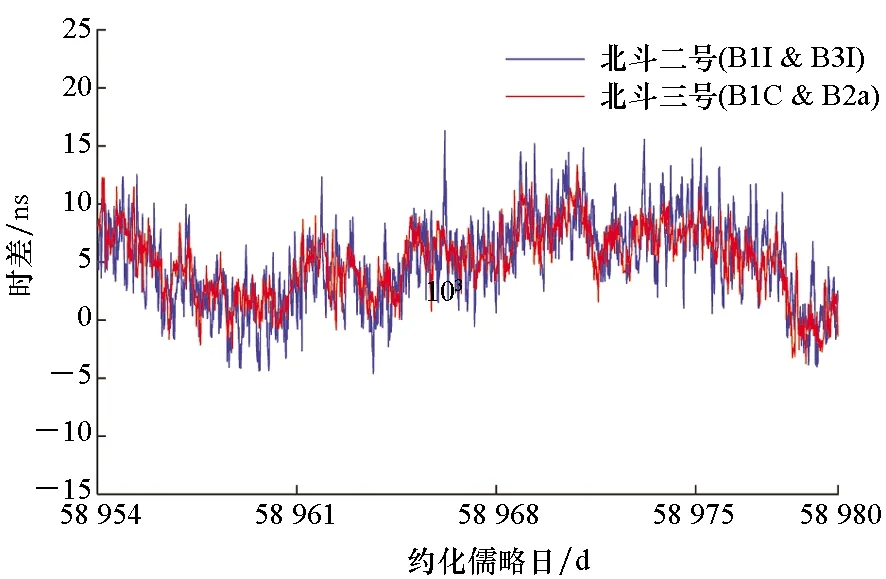
图12 基于北斗二号与北斗三号的共视时间比对Fig.12 Common view time comparison based on BDS-2 and BDS-3
图11为利用北斗二号(B1I & B2I)信号与北斗三号信号以及GPS、GLONASS、Galileo开展的中捷两地高精度共视时间比对钟差。从图11中可以看出,利用四系统开展的共视时间比对钟差具有相同的趋势项,且北斗三号B1C和B2a双频组合获得的两地钟差相对于北斗二号B1I和B2I双频组合获得的两地钟差具有较小的噪声。
图12为北斗二号B1I与B3I双频组合与北斗三号信号双频组合的两地共视时间比对钟差。从图12的结果可以看出,利用北斗三号信号的双频组合与北斗二号具有相同的趋势项,且北斗三号B1C和B2a双频组合获得的两地钟差的噪声小于北斗二号B1I与B3I双频组合的结果。
基于四系统获得两地比对钟差的频率稳定度(通常利用Allan方差(Allan DEViation, ADEV)表征),同时对比了北斗三号新信号体制组合与北斗二号信号组合的结果,如图13和表4所示。

图13 钟差的频率稳定度Fig.13 Frequency stability of time difference

表4 基于北斗共视的两地钟差频率稳定度
从图13和表4可以看出利用北斗(二号以及三号)以及其他导航系统开展中国和捷克两国守时实验室间的共视比对钟差的频率稳定度在10-4/天量级,且北斗三号新信号体制B1C和B2a双频组合获得的两地钟差的稳定度相对于北斗二号B1I和B2I双频组合以及B1I和B3I双频组合具有明显的提高。
图14为利用北斗三号B1C和B2a双频组合获得的两地钟差的稳定度相对于北斗二号B1I和B2I双频组合以及B1I和B3I双频组合提高的百分比。
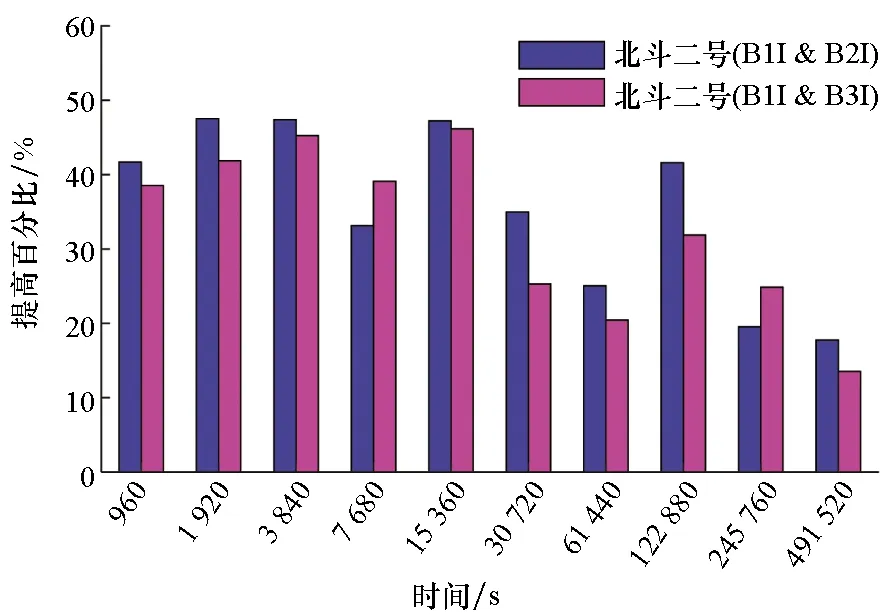
图14 频率稳定度提高百分比Fig.14 Improvement percent of frequency stability
通过图14可以看出基于北斗三号长基线共视比对相对于北斗二号,不仅可以减少两地时间比对钟差的噪声,而且可以改善两地时间比对钟差的稳定度。
3 结论
基于我国时间基准系统和捷克国家时间基准系统中的GNSS多系统接收机原始观测数据(采样间隔为30 s),并采用BIPM发布的CGGTTS-V2E时间传递规范,开展了基于北斗三号信号的共视时间比对研究,对比分析了北斗二号信号观测质量与北斗三号信号观测质量,以及中捷两地分别基于北斗二号及三号信号的共视时间比对。
试验结果表明,基于北斗三号信号的共视时间比对可以有效改善本地测码伪距的观测质量,相对于北斗二号信号,减少了多路径噪声的影响,提高了观测信号的信噪比。基于北斗二号信号频点的双频组合以及北斗三号信号频点的双频组合与GPS、GLONASS、Galileo系统在接收机零基线共钟时间比对方面,利用北斗三号获得的两接收机零基线钟差相对于北斗二号的噪声较小,且标准偏差优于北斗二号,并与GPS以及Galileo系统获得的两接收机零基线钟差结果的标准偏差相当。在共视时间比对方面,利用四系统获得UTC(NTSC)与UTC(TP)的钟差结果具有相同的趋势,且北斗三号信号频点的测码伪距组合解算的两地钟差相对于北斗二号信号频点组合的测码伪距组合解算的两地钟差噪声较小。同时,利用北斗三号信号解算两地钟差的稳定度优于北斗二号信号,提高在10%以上。
目前,随着北斗三号全球系统全球组网的完成,北斗系统将为全球用户提供高精度的PNT服务。同时基于北斗三号信号频点的高精度时间比对也为参与国际原子时的计算提供了技术支撑。
猜你喜欢
广东通信技术(2023年9期)2023-10-29 07:09:32
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
导航定位学报(2018年3期)2018-09-03 00:56:16
载人航天(2016年4期)2016-12-01 06:56:24
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
水利科技与经济(2016年9期)2016-04-22 01:07:30
电信工程技术与标准化(2015年10期)2015-12-22 09:08:10
电信工程技术与标准化(2013年4期)2013-08-09 08:22:28
