
重力势能锁止型外骨骼设计及其效能评价*
2021-12-14 12:50:08曹恩国胡伟峰
国防科技大学学报 2021年6期
曹恩国,高 阳,王 刚,胡伟峰,曹 毅
(1. 江南大学 设计学院, 江苏 无锡 214122; 2. 江南大学 机械工程学院, 江苏 无锡 214122)
目前,外骨骼机器人已经成为国内外各科研机构的研究热点[1-2]。下肢外骨骼是一种可穿戴的机械装置,为穿戴者提供支撑、保护和助行等帮助[3-4]。外骨骼按照动力源可分成主动式和被动式两类:主动式外骨骼需要外部能源提供能量,如BLEEX[5-6]、ReWalk[7-8]、HAL[9]等,整体重量较大,结构较复杂,电池电量耗尽后将严重阻碍人体的运动;被动式外骨骼不需要外部能源的驱动,依靠机械外骨骼自身的传动机构来实现助力。比利时根特大学运动科学系的研究表明踝关节跖屈所需的力量可以从膝关节伸展减速运动中回收,该团队设计的被动式外骨骼可以减少穿戴者(6±2)%的行走能量消耗,但该外骨骼不能移动[10]。美国特拉华大学开发出了一种“重力平衡”被动式外骨骼,这种外骨骼可以在整个步态范围内卸载掉下肢关节的负重,穿戴外骨骼条件下的平均肌电描记(ElectroMyoGraphy, EMG)峰值约为不穿戴外骨骼条件下的25%[11]。澳大利亚国防科技组织研发的被动式外骨骼的柔性电缆系统可以将66%的负重直接传递到地面[12]。美国卡内基梅隆大学设计了一款被动式外骨骼,通过棘轮结构和弹簧收集小腿拉伸与收缩的能量用于行走过程助力,但只能降低7.2%的能量消耗[13]。综上所述,现存被动式外骨骼在负重方面表现出色,但在步行辅助中存在助力效果不明显等缺陷。本研究开发了一种基于重力势能锁止的下肢外骨骼,利用行走过程中人体整体重力势能损失作为驱动能源,并制作了能量转换装置,将重力势能“转移”到摆腿所用的动能,这样只需较小的储能行程就可以为摆腿提供较大的助力行程与能量辅助,从而达到辅助步行的目的。该设计具有重量轻、成本低、与人体匹配度高等优点,并通过实验验证了该外骨骼样机的助力性能。
1 外骨骼设计与分析
1.1 外骨骼原理设计与机构设计
如图1所示,人体按照正常步态行走时,单个步态周期可分为支撑相和摆动相。从首次触地期到支撑相末期,人的单脚从悬空到与地面接触,重力势能与肢体动能做功,直到重力势能降到最低。从摆动相前期到摆动相末期,人体依靠自身肌肉和惯性完成下肢屈曲动作。根据哈佛大学学者Mochon和McMahom对人类行走过程中摆动腿的研究得出,人体支撑腿与摆动腿的运动状态类似于倒立双摆[14]。因此,本设计将助力机构放置在髋关节处,在支撑相储存重力势能与动能做功,减少触地时对各关节造成的冲击,在摆动相释放存储的能量提升大腿以达到辅助行走的效果,在摆动过程中膝关节的运动主要靠摆腿的惯性实现运动辅助。

图1 人体步态Fig.1 Human gait diagram
根据以上分析,设计了一款被动式下肢外骨骼,其基本结构和零部件如图2所示。此外骨骼模型通过曲柄滑块机构实现弹簧垂直位移与髋关节旋转的转化,且保持了较好的传动角[15]。通过大小链轮传动实现行程的放大,将较小的弹簧伸缩量转化为足够大的髋关节摆腿角度;通过足部换向机构实现行程的放大,保证了踩踏舒适;通过棘轮、棘爪实现助力的传动锁定,通过摆盘机构实现传动锁定的自动控制,并通过滑轮与牵引钢丝实现弹簧伸缩行程的倒置。整体模型在髋关节、膝关节、踝关节处设定了三个旋转自由度,髋关节的运动范围为-10°~50°,膝关节与踝关节运动范围不限制,双腿外骨骼总质量为2.85 kg。
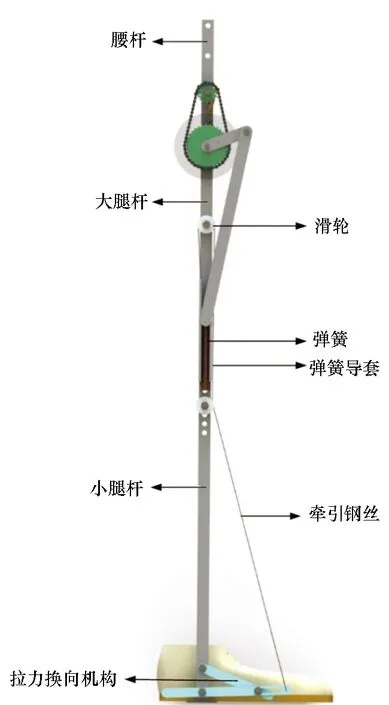
(a) 总体装配示意(a) Schematic diagram of general assembly

(b) 传动锁定机构示意(b) Schematic diagram of transmission and locking mechanism图2 外骨骼零部件示意Fig.2 Schematic diagram of exoskeleton components
1.2 外骨骼助力过程及关键步态分析
如图3(a)、图3(e)所示,穿戴外骨骼模型行走,在支撑相前期足底触及地面后,进入储能阶段,在支反力FN的作用下钢丝的拉力F1将弹簧拉伸,曲柄做逆时针运动。在储能阶段末期,当人体处于支撑相中后期时,脚面与地面完全接触,此时髋关节的运动角度为-10°,随大腿杆一起运动的摆盘,在其上柱体B的推动力作用下,将棘爪扣合在棘轮的轮齿中,链传动失效,与大链轮相连接的曲柄处于最上方的极限位置,系统进入释能阶段开始辅助抬腿。
如图3(b)、图3(f)所示,在助力阶段中,弹簧逐渐缩短,释放能量为髋关节助力。棘轮和棘爪处于扣合状态,链传动的失效导致曲柄在这个过程中处于静止状态,连杆的下端点在弹簧的拉力F2作用下相对于大腿杆做直线运动。这个过程中连杆绕其上端点做逆时针转动,连杆在弹簧导套侧面施加力来助力抬腿过程。
如图3(c)、图3(g)所示,当助力过程结束时,髋关节运动角度为50°,随大腿杆一起运动的摆盘在其后面柱体A的推动力作用下,将棘爪和棘轮打开,链传动恢复工作,此时弹簧处于原长,大腿处于步态最高位置。
如图3(d)、图3(h)所示,释能过程结束后,步态将进入过渡阶段,髋关节开始做顺时针转动,小腿在惯性的作用下继续做逆时针转动。此阶段棘爪和棘轮处于打开状态,链传动恢复工作,在脚面触及地面之前,曲柄伴随着大链轮做顺时针转动。直到足底再次触及地面后,开始储能阶段,进入下一次步态循环。
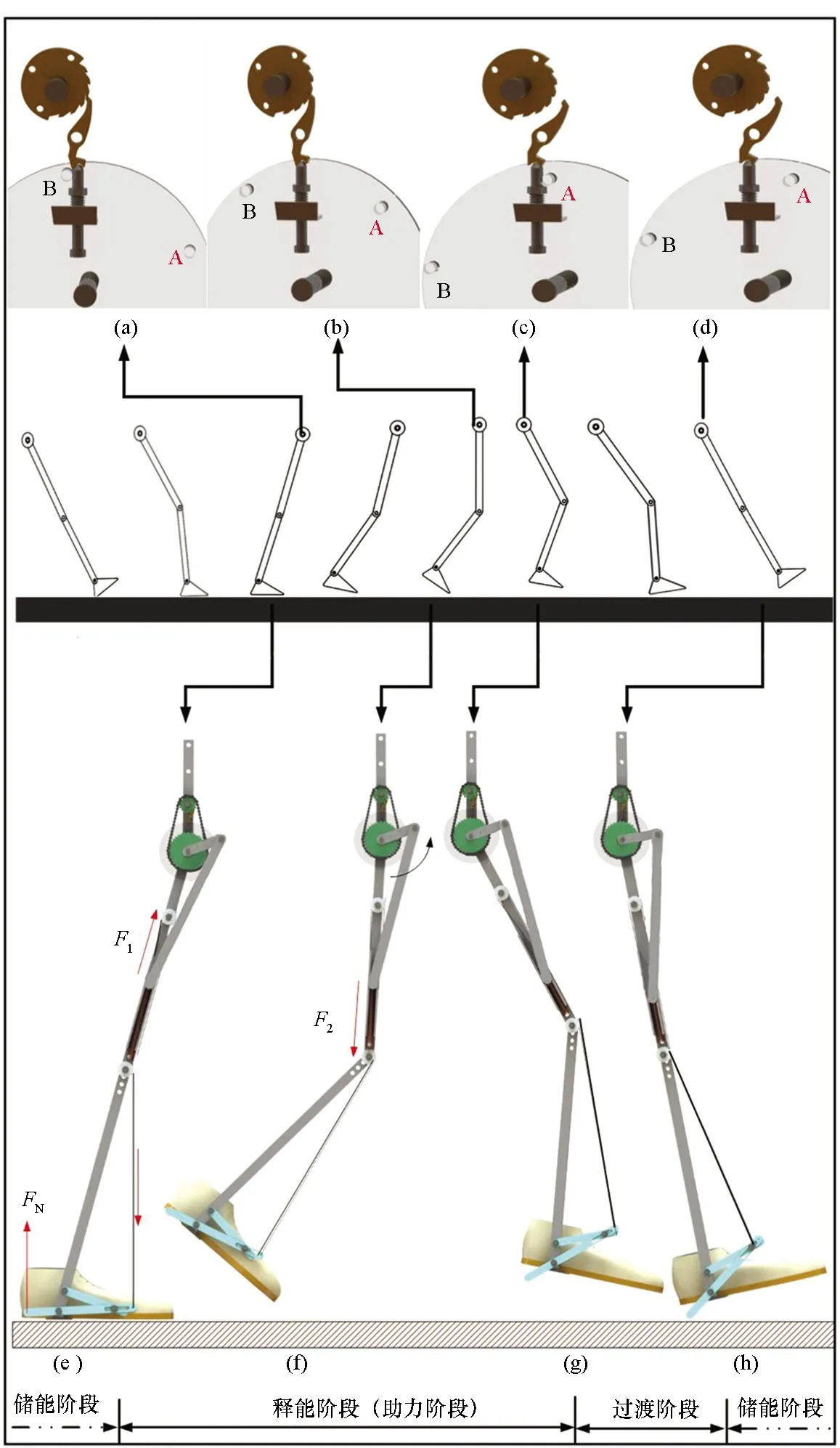
图3 外骨骼工作过程Fig.3 Working process of exoskeleton
2 基于Adams的外骨骼动力学分析
2.1 Adams仿真预处理
Adams是一款强大的动力学仿真软件,复杂模型需要先在其他建模软件中建立,再导入仿真,本研究模型可以在本软件内直接建立,并按照如下步骤设置:设置背景网格参数及重力参数;将人体上肢简化为大地参考系下的固定端;将连杆的连接部分均设置为转动副;添加各部分质量参数,例如穿戴外骨骼时大腿部分质量应设置为大腿质量与大腿杆质量之和;将各个转动副驱动数据导入,将各个关节对应的角位移添加至转动副上;将足部所受摩擦力及支持力导入;设置仿真时长为1.3 s,仿真步数为500。完成后外骨骼动力学模型如图4所示,动力学模型参数如表1所示。
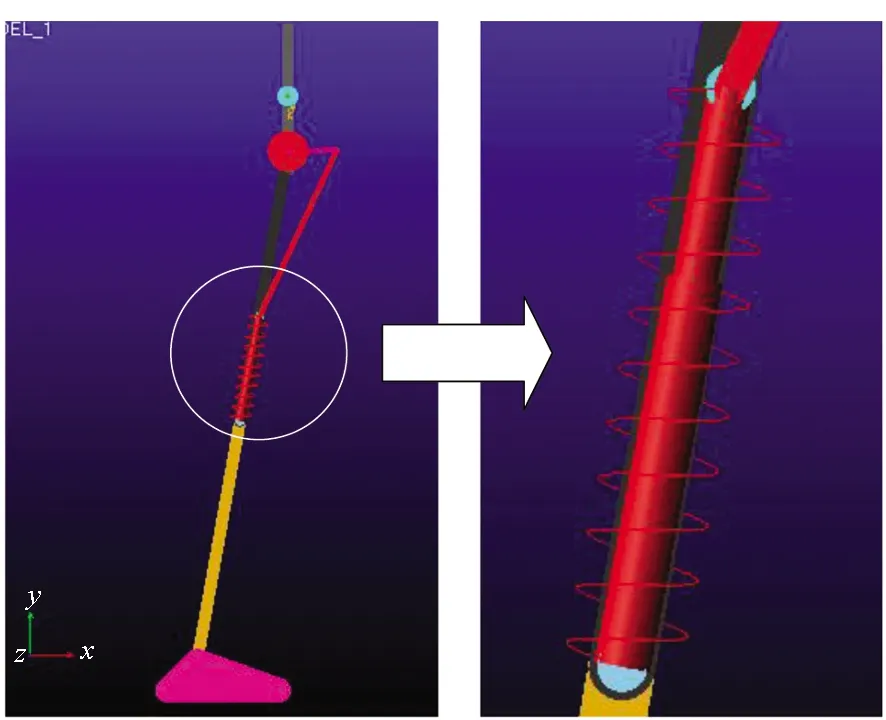
图4 外骨骼动力学模型Fig.4 Dynamic model of exoskeleton
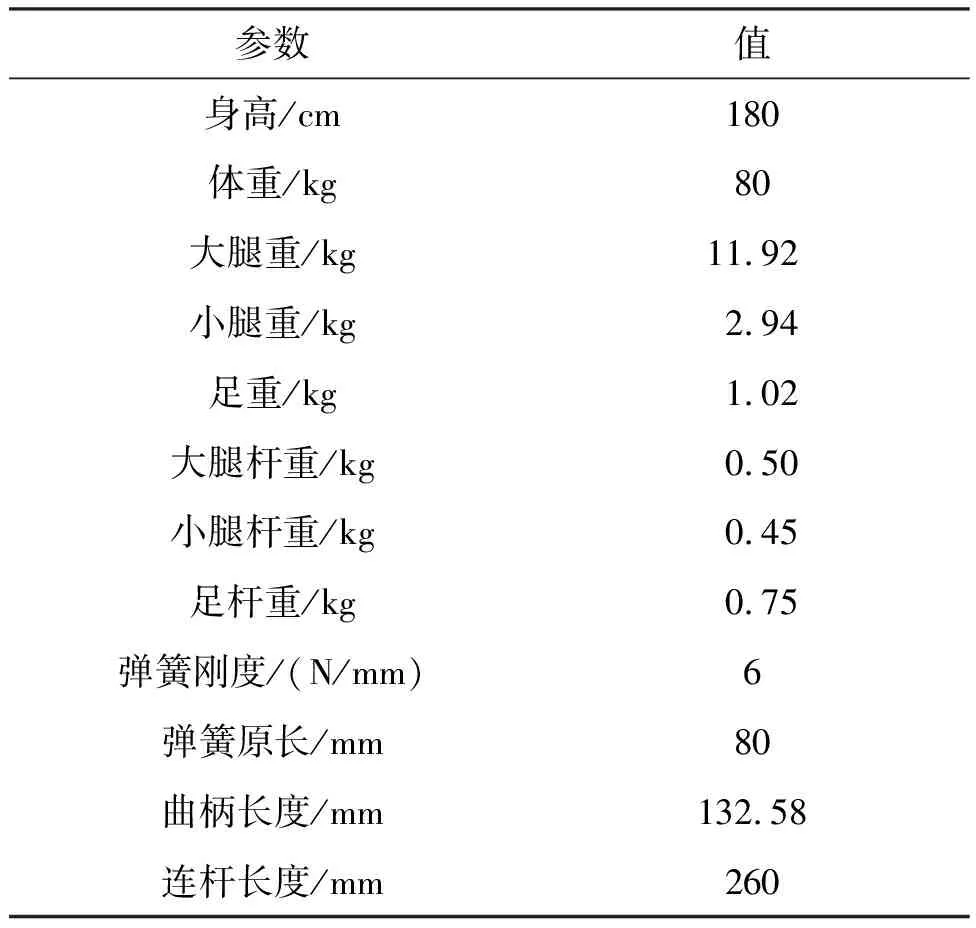
表1 外骨骼动力学模型参数
2.2 仿真结果与分析
此外骨骼的传动系统主要针对髋关节的运动,并不涉及膝关节和踝关节的助力,且髋关节助力并不会影响到膝关节、踝关节的力矩和功率,因此仅计算了髋关节的力矩和功率变化曲线。将动力学模型的参数导入Adams中,得到髋关节力矩和髋关节功率变化如图5~10所示。
如图5、图6所示,通过对比两个阶段发现,在储能阶段,无外骨骼下肢的髋关节峰力矩要小于穿戴外骨骼时的髋关节峰力矩,而在释能阶段,穿戴外骨骼的髋关节峰力矩则小于无外骨骼下肢的髋关节峰力矩,且释能阶段穿戴外骨骼对于髋关节峰力矩的积极作用大于在储能阶段的消极作用。如图7所示,通过对比无外骨骼下肢的髋关节峰力矩总量和穿戴外骨骼髋关节峰力矩总量,可以发现峰力矩有了23.43%的下降。
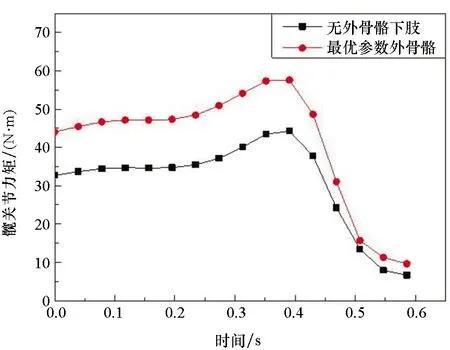
图5 储能阶段髋关节力矩对比Fig.5 Comparison of hip joint torque in energy storage stage

图6 释能阶段髋关节力矩对比Fig.6 Comparison of hip joint torque in energy release stage

图7 髋关节峰力矩对比总图Fig.7 Total comparison of hip joint peak torque

图8 储能阶段髋关节功率对比Fig.8 Comparison of hip joint power in energy storage stage
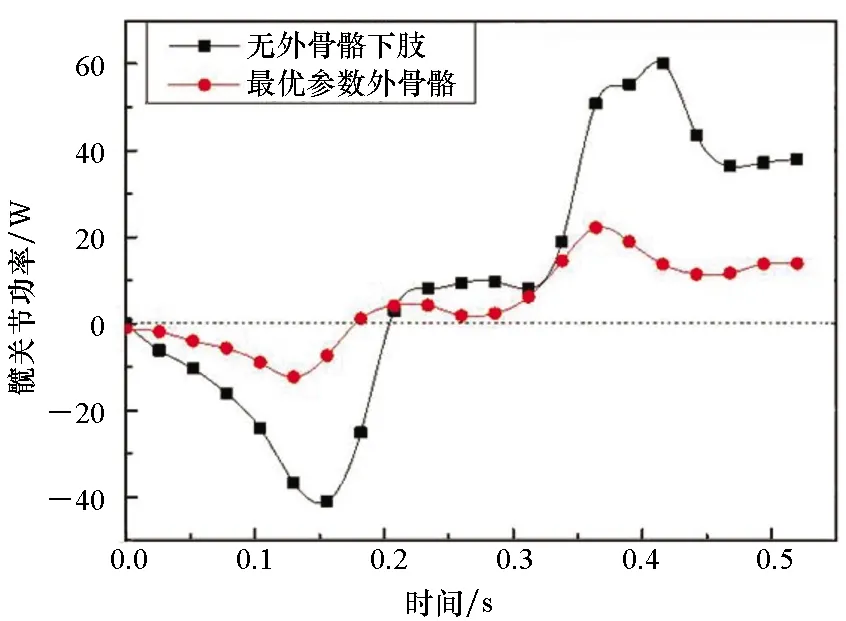
图9 释能阶段髋关节功率对比Fig.9 Comparison of hip joint power in energy release stage

图10 髋关节做功对比总图Fig.10 Total comparison of hip joint work
如图8、图9所示,通过对比两个阶段发现,在储能阶段,无外骨骼下肢的髋关节做功量要小于穿戴外骨骼时的髋关节做功量,而在释能阶段,穿戴外骨骼的髋关节做功量则小于无外骨骼下肢的髋关节做功量,且释能阶段穿戴外骨骼对于髋关节做功的积极作用大于在储能阶段的消极作用。如图10所示,通过对比无外骨骼下肢的髋关节做功总量和穿戴外骨骼髋关节做功总量,可以发现做功总量有了30.59%的下降。
3 外骨骼实验分析
3.1 外骨骼性能测试标准
以往学者提出了多个外骨骼效能变化的测试标准:MacGregor等验证了被动外骨骼在平均行走速度下的行动能力提升[16],通过标准化手段确定了行走速度与心率之间的关系,这种方法也被称为生理消耗指数(Physiological Cost Index, PCI);在文献[17]中,作者通过平均行走速度和PCI确定被动式外骨骼在行走过程中对于行动能力的提升,并且测量了氧气消耗水平(发现了氧气消耗法和PCI方法在能量消耗测量上具有很高的相关性);Isakov等[18]提出了一种FES-aided步行系统,通过测试步态数据和平均速度来测试行动能力;Kobetic等[19]介绍了一种叫作hybrid-FES的系统,可以通过提供平均速度、心率和血压变化、氧气消耗和二氧化碳呼出以及髋部和膝盖角度变化的动力学数据来描述腿部行动能力。直到最近,Esquenazi等[20]采用了两种标准化手段——十米步行测试(Ten-Meter Walk Test, 10MWT)实验以及六分钟步行测试(Six-Minute Walk Test,6MWT)实验来测试截瘫患者在使用外骨骼情况下的行走能力,记录了心率和血压的变化,但是并没有将这些测试手段结合起来。Farris等[21]通过将多种标准化手段结合站起行走计时(Time Up-and-Go,TUG)实验、10MWT实验以及6MWT实验,较为全面地得到了患者在穿戴两款外骨骼下的行动能力。
测试行走能力主要通过监测行走过程中的速度、距离和PCI两种手段。本文将从多个角度来描述测试者的行动能力,共采取三组测试,分别为TUG实验、6MWT实验以及上坡步行测试(Up Hill Test,UHT),实验环境如图11所示。在衡量行走消耗的指标中,氧气消耗被认为是一种较为完善的手段,然而需要很高的实验成本。因此,有人提出基于心率变化来测试能量消耗的方法,其中较为经典的分别是文献[22]中提到的总心率指数(Total Heart Beats Index, THBI)及在文献[16]中提到的PCI。THBI与氧气消耗具有高相关性,PCI相比THBI而言其对于氧气消耗的相关性略微下降,但THBI要求在行走过程中不间断地获取心率数据,而PCI只需要测量休息状态下的和运动后的运动心率,对于测试环境的适应性更好[23]。因此,本研究采用PCI标准测试方法,测试者需要测量试验前的心率P1(beats/min)和试验后的心率P2(beats/min),以及平均速度v(m/min),PCI可以由下列方程得到:

(a) TUG实验(a) TUG experiment(b) 6MWT实验(b) 6MWT experiment(c) UHT实验(c) UHT experiment图11 实验环境Fig.11 Experiment environment
(1)
3.2 实验测试流程
5名来自江南大学机械工程学院的健康测试者(年龄25±2岁,身高172±5 cm,体重72±4 kg)加入了此次实验,在测试之前1 h首先让测试者熟悉下肢外骨骼的使用方法,然后分别进行不穿戴外骨骼和穿戴外骨骼的运动实验,首先进行TUG测试,然后进行6MWT测试,最后进行UHT测试。采用华为运动手环测量记录受试者的心率。
3.2.1 TUG测试流程
TUG测试标准如下所述:选择无坡度水平地面作为测试环境,在起点设置椅子,并在距离15 m的位置上标记转折点,测试者听到指令后在起点由坐姿站起,并以舒适的速度走向转折点,到达后转身走回起点,往返共30 m,实验结束后记录下完成的总时间。为了标准化测试,每次测试都在静息心率时记录心率并开始,完成任务后15 s再次记录心率。测试者在未穿戴和穿戴外骨骼时各完成3次有效测试,在测试过程中遇到未获取到心率的情况则视为无效测试。TUG测试主要考察测试者完成日常组合运动的能力。
3.2.2 6MWT测试流程
6MWT测试标准如下所述:选择无坡度的水平地面作为测试环境,测试者听到指令后开始,并以尽可能快的速度行走,到达6 min时停止,实验结束后记录下完成的总距离。为了标准化测试,每次测试都在静息心率时记录心率并开始,完成任务后15 s再次记录心率。测试者在未穿戴和穿戴外骨骼时各完成3次有效测试。6MWT测试主要考察测试者持续步行的运动能力。
3.2.3 UHT测试流程
UHT测试标准如下所述:选择江南大学曲水桥作为测试环境,桥底起点与桥顶终点之间距离为80 m,高度差为8 m,测试者听到指令后开始,并以尽可能快的速度行走,到达终点后停止,实验结束后记录下完成的总时间。为了标准化测试,每次测试都在静息心率时记录心率并开始,完成任务后15 s再次记录心率。测试者在未穿戴和穿戴外骨骼时各完成3次有效测试。UHT测试主要考察测试者上坡步行的运动能力。
3.3 测试结果与讨论
对于测试结果,在三个方面进行讨论,分别是运动能力、心率以及能量消耗,本文使用了SPSS 2.0版本的配对样本t检验,并以95%的置信级别来确保每组测试的差异在统计学上是显著的(p>0.05时差异不显著,p<0.05时差异显著)。
3.3.1 运动能力
如表2所示,将TUG和UHT测试的完成时间、6MWT测试的行走距离作为检测运动能力的测试标准,记录了各组的测试数据平均值以及标准差。其中TUG测试时间未通过显著性测试,其原因可能在于TUG测试动作较为复杂,测试者在动作转换时会受到外骨骼结构的影响,从而抵消了外骨骼带来的运动能力的提升。在6MWT测试中,测试者的运动能力有了5.29%的提升,且通过了显著性测试,证明了外骨骼在连续平地运动中的有效性。在UHT测试中,测试者完成运动的时间降低了1.21%,但是未通过显著性测试,其原因可能在于测试者需要完成上坡动作,外骨骼的自重影响了对运动能力的提升。
3.3.2 心率
将运动后15 s的心率和休息状态心率的差值作为研究心率变化情况的标准,是否穿戴外骨骼的心率变化如表3所示,结果表明在TUG、6MWT和UHT测试中,在穿戴外骨骼时心率差分别有4.5%、3.3%和9.4%的下降,其中TUG和6MWT测试结果未通过显著性测试,其原因可能是这两种运动剧烈程度较低,助力效果带来的心率差降低不显著。UHT测试结果通过了显著性测试,其原因可能是上坡路况运动程度更剧烈,助力效果带来的心率差降低更加显著。

表2 运动能力测试平均值及标准差总览表

表3 心率差平均值及标准差总览表
3.3.3 能量消耗
将PCI作为能量消耗的标准,表4中展示了是否穿戴外骨骼的测试数据。结果表明在TUG测试中,穿戴外骨骼的情况下能量消耗下降了2.9%,但是未通过显著性测试,其原因可能在于TUG测试动作较为复杂且剧烈程度较低,测试者在动作转换时会受到外骨骼结构的影响,降低了外骨骼的效果。在6MWT测试中,穿戴外骨骼的情况下能量消耗降低了8.1%,且通过了显著性测试;在UHT测试中,穿戴外骨骼的情况下能量消耗下降了10.4%,且结果通过了显著性测试。这说明在UHT和6MWT测试中,穿戴外骨骼能够显著降低能量消耗。

表4 能量消耗平均值及标准差总览表
4 结论
本研究设计了一款被动式下肢外骨骼,将重力势能转化为行走过程中的动能,并分析了储能和释能两个过程中的机构传动以及能量转换。通过外骨骼动力学分析,得到髋关节峰力矩总量在穿戴外骨骼时比不穿戴外骨骼时降低了23.43%,髋关节做功总量在穿戴外骨骼时比不穿戴外骨骼时降低了30.59%,初步验证了外骨骼的效果。为了验证外骨骼的实际使用效果,分别进行了短距离动作转换TUG测试、上坡行走UHT测试以及长时间连续行走6MWT测试。实验结果表明,穿戴外骨骼对于短距离动作转换未产生显著效果, 但在长时间行走中降低了8.1%的能量消耗,在上坡行走中降低了10.4%的能量消耗。
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
体育科技文献通报(2022年4期)2022-10-21 03:20:00
体育科技文献通报(2022年3期)2022-05-23 13:46:20
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
作文中学版(2020年1期)2020-11-25 03:46:21
中国工作犬业(2019年2期)2019-03-06 12:26:16
发明与创新·中学生(2017年12期)2017-12-11 00:25:48
发明与创新·中学生(2016年1期)2016-05-30 10:48:04
发明与创新(2015年25期)2015-02-27 10:39:14
