
基于视觉的嵌入式轮椅床自动对接系统
2021-12-14 02:47郭韶华解迎刚刘菁林
物联网技术 2021年12期
郭韶华,解迎刚,刘菁林
(北京信息科技大学 信息与通信工程学院,北京 100101)
0 引 言
当代中国的老龄化现象逐渐严重,考虑到独生子女家庭众多,加之当今时代竞争较大,老人的子女忙于工作,往往没有时间照顾老人;如果选择雇佣保姆来看护老人,又将增加一笔较大的开销。综上所述,大多数家庭更愿意购买一款电动轮椅床,在方便老人行动的同时,节省开销[1]。目前市面上的普通轮椅床一般不具备避障和床椅自动对接功能,无法解决老年人日常行动不便的问题。多功能护理床作为医疗护理行业的创新护理设备,其外形及功能的创新对老年人(尤其是失能或半失能老年人)护理起到至关重要的作用。随着生活品质的提升,对护理床功能的要求愈加苛刻[2]。
另外,除了满足家庭需要,医院也可以使用。输液室里的靠背座椅大多无法灵活调整位置,病人在输液时身体不适,体验不佳,如果轮椅床可以通过调整靠背位置来调整坐姿,那么病患在输液时将感到更加舒适、轻松。对于看护病患的家人而言,在夜晚不方便离开时也可以躺在轮椅床上休息,随时照顾病患或者老人。当家属不在时,病患若想躺下休息,只需按动控制轮椅床的按钮,使轮椅和床体对接即可。该轮椅床既方便了家属和医生,又能使病人得到更好的休息,利于康复。大多数病人在伤病期间往往心理脆弱,身体虚弱,智能轮椅床不仅提供了可靠的活动方式,同时也减轻了他们的心理负担。目前大多数研究基于对轮椅的智能化改造实现轮椅的自动感知、自动避障、灵敏控制、无线通信、双陪护等功能,具有功耗低、安全性强、功能全面、性价比高等优点[3]。
1 设计方案
基于视觉的嵌入式轮椅床自动对接系统是一款以人工智能和嵌入式技术为核心的多功能护理床[4],通过获取轮椅与床体精准的相对位姿,实现可分离式轮椅床的对接[5]。轮椅床自动对接系统流程如图1所示。首先调整好电机转速,启动程序模型车前进,根据后续各传感器返回的电平值,改变2个电机的运转状态和运转速度,如即将碰到障碍物时,模型车转弯实现避障,同时根据FPGA处理的图像实时观测模型车相对于U型对接板块的位置,借助LED灯显示左偏或者右偏,实时进行位置调整;当模型车正对U型对接板块时,保持一定的速度前进,在对接板块的终点安装一个碰撞传感器作为对接卡扣,对接完成后电机停止运转,模型车停止前进。
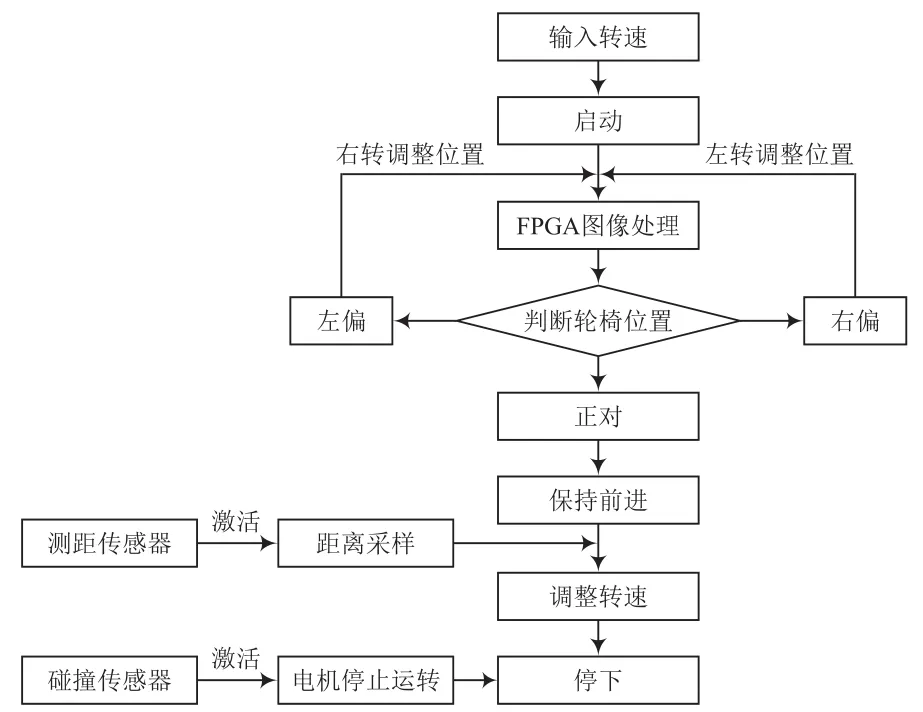
图1 轮椅床自动对接系统流程
2 装置工作原理
该系统主要由电机模块、图像处理模块、传感器模块等组成。
2.1 电机模块
系统选用5 V电压驱动的4相5线步进电机(减速步进电机),其减速比为1∶64,步进角为(5.625/64)°[6]。如果需要转动1圈,那么需要360/(5.625/64)=4 096个脉冲信号[7]。步进电机结构与外形尺寸如图2所示。
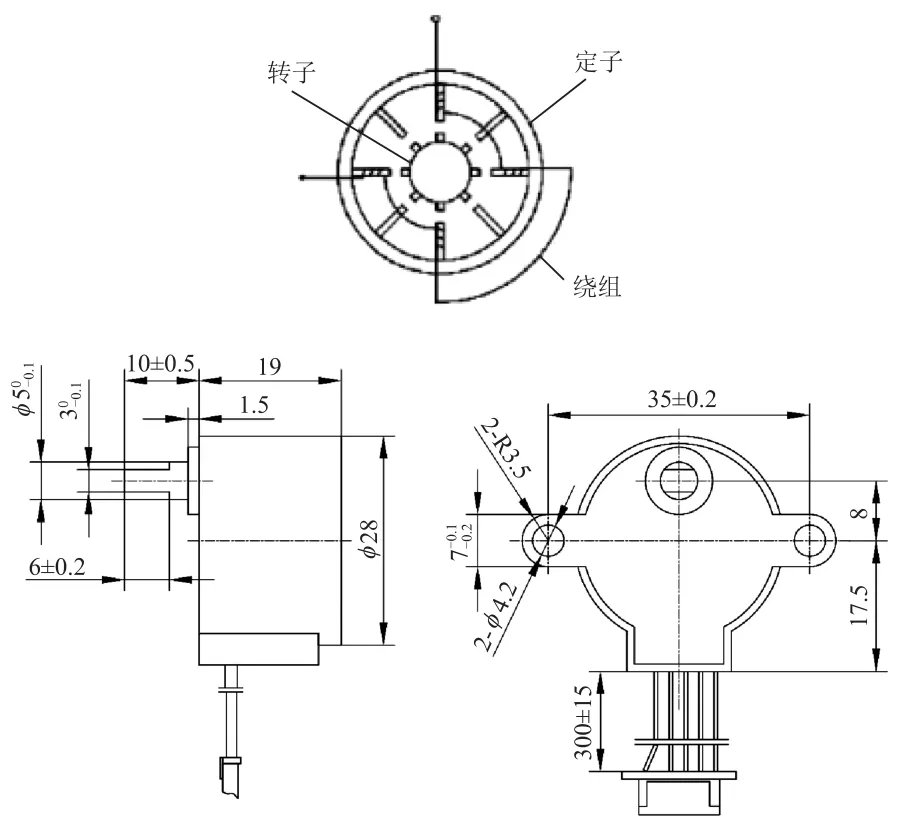
图2 步进电机结构与外形尺寸
实验采用FPGA模块控制步进电机运转,先规定左、右电机的运转速度,在未碰到传感器前,电机以恒定速度运转;当左、右电机以相同速度运转时,模型车保持前进状态;在收到需要转弯的指令后(如前方有障碍物,或者对接路线需要调整),控制左、右电机的运转状态,当左边电机运转右边电机停止时,模型车向右转,反之模型车向左转。电机工作流程如图3所示。

图3 电机工作流程
2.2 图像处理模块
随着多媒体的广泛应用,与多媒体密切相关的图像处理技术也得到了飞速发展,出现了多种形式的图像处理技术,FPGA就是其中一种,具有开发难度小、应用方式灵活以及维护成本低等优点[8]。FPGA的处理速度相比PC机和DSP更快,故本系统采用FPGA对图像进行处理(对图像中的红点进行颜色识别)。先在U型床两侧对称画2个红点用来判断轮椅的位置,显示图像的同时提取2个红点的位置坐标,并计算2个红点中间处的坐标。当摄像头位于2个红点正中心时,判断自身位置正对U型轮椅床,可以保持前进;当摄像头判断自身所处位置相对于2个红点中心位置左偏时,说明目前轮椅相对于U型床的入口位置左偏,其中一个LED灯亮起,提醒用户右转相应角度来调整位置;当摄像头判断自身所处位置相对于2个红点中心位置右偏时,说明目前轮椅相对于U型床的入口位置右偏,另一个LED灯亮起,提醒用户左转相应角度来调整位置。FPGA提取U型床位置流程如图4所示。

图4 FPGA提取U型床位置流程
2.3 传感器模块
历史的车轮滚滚向前,科学技术也在不断发展,新技术、新概念不断涌出,为传感器的发展带来了新的动力。此次实验主要使用测距传感器、碰撞传感器和避障传感器,碰撞传感器和避障传感器在未被激活时保持在1状态,激活后为0状态,由此控制模型车转弯、避障。测距传感器可以实时监测模型车距离U型对接模块的距离,在即将对接完成时改变模型车的速度。通过多传感器数据分析处理,及时算出车身避障所需转动的角度,从而提高四轮小车自动避障的灵敏度和精度[9]。
3 系统实现
系统识别通过FPGA实现,实验采用QuartusⅡ13.0编写程序代码,编程语言选用Verilog。
3.1 图像显示
本次实验采用的摄像头为OV5640,对摄像头进行相关配置并接收摄像头采集的数据信息,将摄像头传入的图像数据处理后写入SDRAM。
3.2 颜色提取
该部分主要包括图像采集模块、数据缓存模块、FPGA核心模块和VGA显示模块。通过动态阈值和自适应颜色匹配模板实现颜色识别,使得系统对光照变化的环境有很好的鲁棒性[10]。系统总体设计如图5所示,图像处理流程如图6所示。

图5 FPGA系统框架
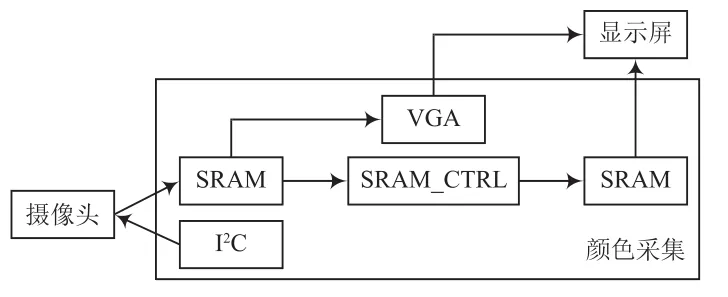
图6 图像处理流程
3.3 步进电机的控制
普通的ARM和FPGA都可以作为控制芯片实现步进电机的控制。但如果步进细分,选择ARM实现控制,则需要频繁进出定时器来实现高频率的step脉冲输出。由于ARM的代码为顺序执行,频繁进出定时器势必会打断其他操作,对系统性能的提升存在弊端[11]。因此,本次实验采用FPGA控制步进电机的方式来控制模型车的前进、转弯,避障或对接变速则通过各种传感器辅助实现。2个电机分别用1个碰撞传感器来控制其运转与停止,当碰撞传感器激活时,其逻辑值由1变为0,电机停止运转并保持状态值不变。电机持续运转及其仿真如图7所示,此时传感器为高电平,电机逻辑值不断改变,控制其持续运转。当碰撞传感器激活时,电机状态保持不变,电机停止运转及仿真如图8所示。

图7 电机持续运转及仿真

图8 电机停止运转及仿真
3.4 对接过程
当智能车轨道已正对U型对接板块时,测距传感器实时监测两者间的距离。在传感器前方不同位置放置一个障碍物,改变障碍物与传感器的距离,并在PC端显示距离信息。距离显示信息及流程如图9所示。
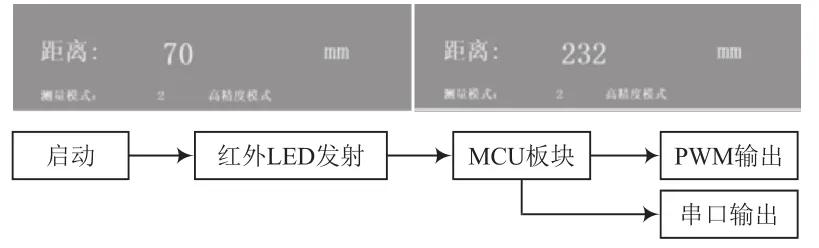
图9 PC端显示的距离信息及流程
在监测距离时,还需注意轮椅对接时行进的速度,当即将到达终点时,激活测距传感器,改变cnt计数值与步进电机逻辑值的变化速度,从而降低轮椅床的对接速度。如图10所示,当前方障碍物与臂章传感器间达到一定距离时,传感器被激活,电平值由高变为低,电机转速改变。

图10 避障传感器激活
图11为实际对接过程的图片,途中已经根据2个红点调整好模型车的位置,准备进行对接。对接过程中,模型车上的避障传感器会在即将对接完成后改变车速,并通过测距传感器[12]实时监测距离,对接完成后,模型车停下。
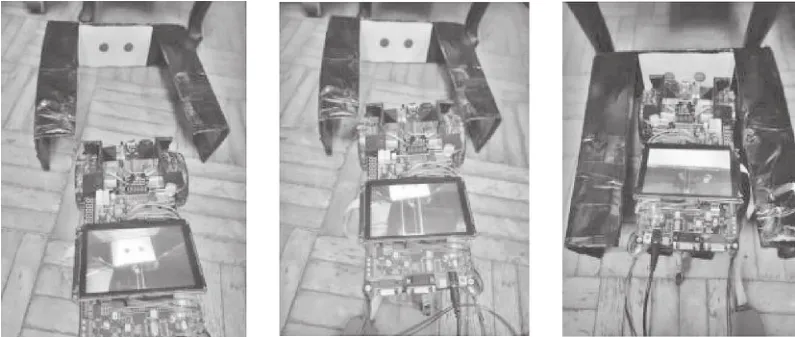
图11 对接过程
4 结 语
系统实现了一种可以不借助人力控制的轮椅对接系统,在控制对接过程中,采用FPGA开发板控制步进电机来实现对模型车运动的控制,并利用传感器实现避障、控速的功能;调整位置时通过FPGA进行颜色识别,处理图像中事先画好的红色标记,同时在显示屏中显示采集的图像,借助LED灯反馈位置信息,便于及时调整位置;对接时的速度通过激光测距传感器控制,完成对接。本系统实现了对空巢老人居家帮扶器械的智能化与物联网化改造升级,在物联网领域和智能家居领域具有一定的实际应用价值,应用前景广阔。
猜你喜欢
山东工艺美术学院学报(2020年5期)2020-12-10
数学小灵通·3-4年级(2020年3期)2020-06-24
新世纪智能(高一语文)(2019年10期)2020-01-13
小资CHIC!ELEGANCE(2019年28期)2019-09-12
海峡姐妹(2019年1期)2019-03-23
天津诗人(2017年2期)2017-11-29
山东工艺美术学院学报(2017年4期)2017-11-01
爆笑show(2015年5期)2015-07-09
疯狂英语·中学版(2013年2期)2013-03-25
