高性能Ku波段线性调频雷达的研究与设计
2021-12-13 06:31王贝贝王志鹏
电视技术 2021年10期
王贝贝,王志鹏
(1.江苏师范大学 江苏圣理工学院,江苏 徐州 221116;2.天津大学 微电子学院,天津 300072)
0 引言
连续波雷达是一种运用连续信号获取目标物距离的雷达体制,其中线性调频连续波雷达由于具有高分辨率、无距离盲区、辐射功率小等优点,被广泛应用在国防军事、民用系统中[1]。通过直接数字频率合成器(Direct Digital Frequency Synthesis,DDS)技术,既能减小物体尺寸,又能获得高分辨率、频谱纯净、扫频时间短的连续波信号。但DDS输出频率最高只能达到参考时钟的40%,远远不能满足雷达发射所需的频段。
本文通过DDS与锁相环(Phase Locked Loop,PLL)技术相结合的方法,获得Ku波段的雷达激励信号,并经功率放大器放大后发射出去。该模块集成了发射通道、接收通道、I/Q通道以及ADC采样系统,并通过在链路中加隔离器来防止信号窜扰,由此设计出一款便于携带的一体化雷达系统。
1 系统设计方案
Ku波段抗微波辐射能力强,不易受外界环境的干扰,因此被广泛应用到雷达系统中。目前有多种途径可以产生该频段的调频信号,其中应用最为广泛的是小数分频PLL,但该方法在相位噪声、跳频时间、杂散抑制以及线性度方面存在局限性,已经不能满足当代电子对抗对高性能雷达的要求。为了实现高性能Ku波段线性调频雷达的设计,获取所需要的Ku波段发射激励信号,本设计拟运用DDS和PLL相结合的方法,将两种技术优势相结合,在获得高频信号的同时,避免相位噪声的恶化[2]。
雷达系统的总体设计方案如图1所示。本设计选用100 MHz时钟源为两路PLL芯片提供参考,其中一路经过锁相环芯片HMC783上变到11.6 GHz作为本振信号。另一路经过HMC833上变到2.5 GHz,该高频时钟为DDS提供参考。进入DDS芯片AD9915并输出带宽100 MHz、扫频时间2 ms的调频信号,通过混频器后,产生雷达需要的12.3~12.4 GHz的射频信号。为了缩小系统尺寸、提高可携带型,本设计将发射和接收通道集成到一个模块中,通过把射频信号功分两路,一路经功率放大器放大后发射出去,另一路与接收到的回波信号进行混频,下变到易于处理的两路基带信号-同相分量和正交分量。为了准确获得I/Q信号中的多普勒信息,接收到的模拟信号经过ADC采样把数字信号传输到处理器中进行快速傅里叶变换(Fast Fourier Transform,FFT),解析出需要的距离信号,克服了模拟正交相检技术受器件自身性能影响大的弊端,提高了I/Q信号幅度相位的一致性。该雷达总的设计尺寸为148 mm×118 mm。

图1 雷达系统整体设计方案
2 调频信号单元设计
本设计的关键部分是调频信号电路的设计。通过调频信号的带宽和扫频时间可以理论算出所测目标物的距离信息。推导如下:

式中:f1、f2是由DDS产生的扫频信号的上限和下限频率。可通过控制单元改写DDS中的寄存器的值来改变输出扫频信号的BW上限和下限,二者相差求出扫频带宽,T为扫频时间,由寄存器的取值决定,进而求得DDS产生的非驻留斜波斜率k。射频信号从发射到接收所用的时间为Δt,由式(3)求得发射信号与反射信号混频后的差频信号,用光速c距离R代入式(4),推导出需要的雷达测距 公式。
扫频信号的步进时间影响了雷达测距的精度,通过DDS斜率步进间隔公式计算出最小频率步进间隔:

参考时钟fsysclk由锁相环HMC833产生的 2.5 GHz信号提供,P是DDS内部寄存器的取值,为了达到最小的频率扫描步进,通过控制芯片写入寄存器为1,代入公式求得,雷达系统最小扫频步进间隔时间为9.6 ns。测得DDS产生的线性扫频信号与PLL生成的11.6 GHz混频后的雷达激励信号如图2所示,其中DDS扫频时间控制在2 ms,扫频上限设置800 MHz,下限设置为700 MHz。
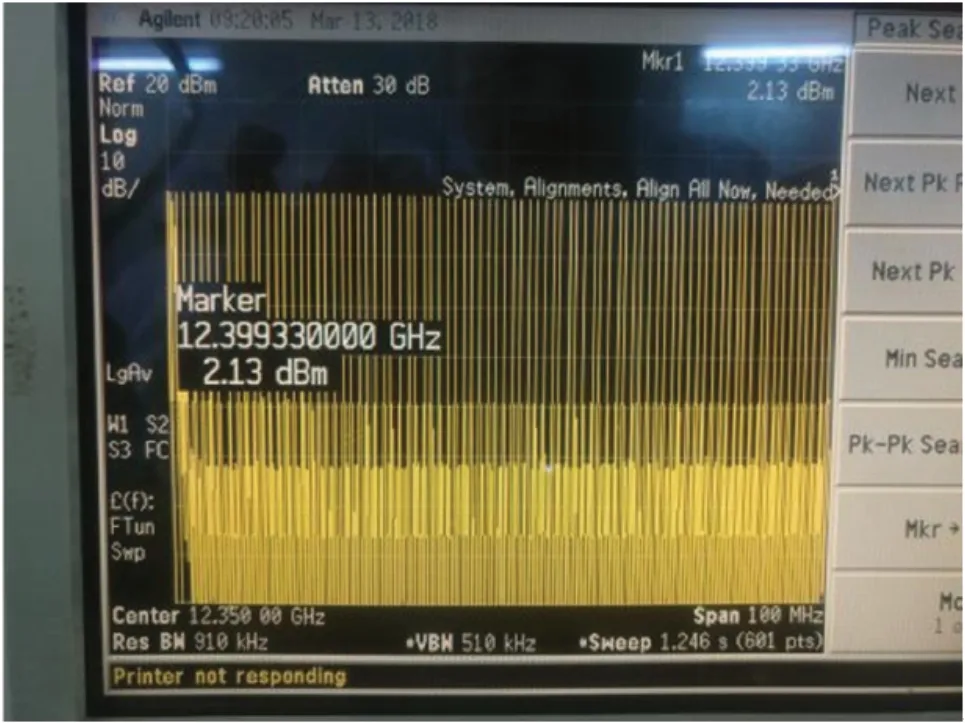
图2 输出雷达激励信号测试图
3 I/Q通道的设计与理论分析
雷达信号经过物体反射后,由天线接收后与发射信号混频,得到两路相互正交的基带信号,经过I/Q通道后进入ADC芯片进行采样[3]。假设在一个扫描周期T内,第n个脉冲信号可表示为:

式中:f0是雷达激励信号的起始频率。经过物体反射后接收到的脉冲信号为:
式中:A(t)代表信号的幅度,回波信号与发射信号混频后经过低通滤波器后得到的信号为:
包含后续处理的I/Q信号,对其中一路进行 分析:

通过欧拉公式计算求得:

对获得的信号进行傅里叶变换获得离散距离谱,经过主控芯片计算出不同差频信号对应的幅值,如图3所示。

图3 差频信号对应幅值信息
由图3可以看出幅度值在28 kHz附近时有一个高峰,代入式(5)可以求出此处差频信号所对应的目标物的距离,高峰值后面的次峰值是由干扰物以及多次反射造成的,可以通过软件滤波去除。串口以ASCII码的格式把处理后的信息打印出来,如图4所示。

图4 差频信号对应距离信息
通过图4可以看出,所测目标物距离在84 m附近,最小精度可以达到3 m。
4 系统的总体装配以及实验平台的 搭建
考虑到电磁兼容的问题,在设计电路时,要着重减小信号之间的串扰,腔体隔腔的合理设计可以很好地避免不同信号之间的相互影响。在混频之前,信号还处于低频阶段,PCB板可以选用4350B,混频之后信号达到了Ku波段,需要选用高频板材料,这里选择罗杰斯5880。由于发射和接收通道在一个模块上,需要在通道之间添加隔离器来增加隔离度,在发射通道的末端添加功率放大器把激励信号放大发射出去,这里选用2 W的功放FMMC5618。总体电路的设计如图5所示。

图5 雷达系统的总体布局
实物装配完成后,使发射和接收天线朝向对面的大楼来测量大楼的距离,并利用示波器来测量接收到的波形信号。实验平台如图6所示,完成对雷达系统的整体调试工作。

图6 雷达系统测试平台
5 结语
本文提出并设计了一款便于携带的线性调频雷达系统,工作在Ku波段,工作带宽100 MHz,扫频时间2 ms,发射激励信号功率2 W,很好地满足了短距离测试的需求。利用DDS产生连续波形,高度集成化的电路设计,极大地缩小了整机尺寸。通过实验平台的搭建测试,测得两楼之间的距离为 84 m,验证了雷达系统的可行性。
猜你喜欢
能源工程(2021年5期)2021-11-20
探索科学(学术版)(2020年2期)2021-01-16
航天器环境工程(2020年3期)2020-11-04
舰船电子工程(2019年6期)2019-07-08
传感器与微系统(2017年7期)2017-08-09
电子制作(2017年8期)2017-06-05
通信技术(2016年12期)2016-12-28
河北大学学报(自然科学版)(2015年6期)2016-01-29
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18