
基于FMCW雷达的差频信号采集系统设计*
2019-07-08 01:54:46
舰船电子工程 2019年6期
(陆军炮兵防空兵学院电子工程教研室 合肥 230031)
1 引言
调频连续波(Frequency Modulated Continuous Wave,FMCW)雷达是一种最小测量距离近、测量精度高的测量技术,具有体积小、结构相对简单、成本和功耗较低、受环境影响小等优点[1],常用于汽车、火车防撞,液位、物位测量。近年来,随着无人驾驶技术的迅速发展,FMCW雷达作为重要的传感器,应用更加广泛[4~5]。
2 FMCW雷达测距原理
FMCW雷达通过发射天线向目标发射调频连续波信号并接收目标的反射信号,用回波信号和发射信号的一部分进行相干混频,得到包含目标距离和速度信息的差频信号,然后对差频信号进行处理和检测,从而得到目标的距离和速度信息。通常线性调频有锯齿波和三角波两种调制方式,前者可获得目标的距离信息,后者可同时获得目标的距离和速度信息,本系统线性调频连续波雷达采用三角波调制方式,处理简单,易于实现。
在静止目标情况下,假定调制信号为理想的三角波,且不考虑寄生调幅、噪声和杂波的影响,由于目标和雷达之间是相对静止的,FMCW雷达系统的发射信号频率按三角波的规律周期性变化,发射信号和回波信号时频曲线如图1(a)中所示,对应的差频信号时频曲线图如图1(b)所示,其中T为调频连续波周期,Δt为延时时间,ΔF为调频带宽,Δf为差频信号频率。
由图1可知,回波信号与发射信号的时频曲线形状相同,仅仅在时间上滞后Δt,则延迟时间Δt与目标距离R的关系为

其中R为目标到雷达天线的距离,c为在自由空间的电磁波传播速度,由图1(a)所含的三角关系可知:


图1 三角波调制的雷达信号时频曲线
结合式(1)和式(2)可得目标静止模式下,目标与雷达之间的距离公式[2~3]:
由上式可见差频信号频率Δf与距离R成线性关系,因此FMCW雷达测距系统的关键就在于测量差频信号的频率,在调制信号参数ΔF和T一定的情况下,只要测得差频信号的频率Δf,就可利用式(3)得到雷达天线与目标之间的距离R。
在运动目标情况下,采用三角波调制的FMCW雷达系统的发射信号和回波信号时频曲线如图1(a)中所示,对应的差频信号时频曲线如图1(c)所示。
当由于目标与雷达天线之间存在相对径向运动,此时接收回波信号的载波相对于发射信号载波将产生一个频移,即为多普勒频移fd,根据多普勒频移原理可知:

其中,f为发射信号的中心频率,v为目标与雷达的相对径向运动速度。对于运动目标,在三角波前半周上升沿和后半周下降沿期间的差频信号不同,fb+为反射信号与发射信号上升沿期间得到的一个差频信号即上扫频段频率,fb+为下降沿期间得到的一个差频信号即下扫频段频率,Δf为目标相对静止时的差频信号频率,三者之间的关系为
联合式(3)和式(4),可得目标的距离和速度[2~3]:

其中v的符号由目标与雷达天线之间相对运动方向决定,当目标靠近雷达天线时,v为正值,反之为负值。由式(3)和式(7)分析可得,静止模式下目标距离与一个完整的调制周期内的差频信号频率有关,在运动模式下,目标距离与前半周期上升沿和后半周期下降沿两段差频信号频率的平均值相关,在实际应用中,不管目标是处于相对运动还是相对静止,只要分别求出调制三角波的上升沿和下降沿的差频信号的频率,就可以利用式(7)和式(8)来计算目标的距离和速度信息,这就是FMCW雷达测距测速的原理。
采用三角波调制信号进行调频时,由图1(b)和图1(c)的差频信号时频特性曲线可以看出,每一个调制周期内都会存在两处不规则的时间区域,在此区间上差频信号频率和目标距离没有直接关系,因此在进行雷达系统设计时,应使得T>>Δt,以减小不规则区;另外也应尽可能地在规则区域内对差频信号进行采样从而减少不规则区域上的影响。受FMCW雷达发射机功率的限制,FMCW雷达一般应用于近程测距,存在T>>Δt,因此从时域来看差频信号在绝大部分时间上的频率是Δf,从频域来看规则区域上差频信号能量远大于不规则区域上差频信号的能量,差频信号的频谱能量集中在以Δf为中心的频带内,所以可在频域上对差频信号进行处理,计算差频信号的中心频率,从而实现对目标信息的提取。
3 FMCW雷达近程测距系统结构
系统采用Innosent公司生产的FMCW雷达收发器 IVS-162[6~8]负责发射和接收雷达信号,利用单片机控制DAC产生雷达工作所需的三角波调制信号,VCO接收三角波调频信号后,输出一个发射信号,发射信号分成二路,一路经发射天线发射出去,一路进入混频器;接收天线接收到回波信息,经去噪放大处理后,进入混频器与发射信号进行混频,从而形成差频信号;经过差频信号处理(处理后的差频信号也称为中频信号)完成滤波放大后送入单片机,由单片机进行AD采样和信号处理,从而获取目标的相对速度和距离信息。系统结构框图如图2所示。
收发前端是雷达系统的核心,主要包括压控振荡器VCO、混频器、定向耦合器等,其中VCO输出信号的频率受到三角波调制信号的控制;定向耦合器是把VCO输出功率的一部分耦合到混频器的输入端,作为混频器的本征信号,混频器的作用是完成回波和本征信号的差频,从而输出差频信号。

图2 系统结构原理框图
4 前端数据采集模块设计
4.1 差频信号处理
FMCW雷达收发器输出的差频信号含有一定的噪声和干扰信号,且幅值很小,大约在10mV~20mV之间,由于随着目标距离的增加,目标差频信号很容易淹没在噪声和杂波中。可见差频信号处理的好坏直接将影响到对目标回波信号的检测,进而影响到测距测速的精确度[9~10]。差频信号处理电路如图3所示。
差频信号处理电路主要由前置低噪放大、高通滤波器、可变增益调整电路和低通滤波器四部分组成。前置低噪放大器由OP211构成的,OP211是高精度运算放大器,可实现低噪声、低功耗、高带宽等特性,可实现放大接收到的微弱差频信号和降低噪声对其的干扰;采用单路、精密、极低噪声、低输入偏置电流运算放大器的AD8671,搭建了二阶巴特沃斯有源高通滤波器和低通滤波器,高通滤波器滤除所泄露的调制信号、电源噪声和近距离低频干扰信号,低通滤波器滤除电路内部和信号中的高频谐波分量;可变增益调整电路由AD603组成,AGC调整电路可根据滤波后信号大小调整增益,将不同的差频信号放大到系统可以进行采样分辨的幅度,以便后续数字处理部分能够正常工作。在三角波调制信号的上升沿和下降沿,通过单片机改变窄带滤波器的中心频率,对去噪处理后的差频信号进行扫描,扫描的宽度可以根据测距范围来选择,通过窄带滤波器的信号进入峰值保持器,A/D采样后送入单片机进行比较识别。
4.2 AD采样和信号处理
由于三角波调频和AD采样需要同步,才能正确获取上升沿和下降沿期间的差频频率,系统采用定时器中断控制DAC模块产生三角波,定时器中断函数内,每产生一个DAC电压值,ADC进行一次采样并保存在一个临时数组中,当临时数组达到采用点数,程序进入FFT算法部分,通过对采样点数进行 FFT变化,即可计算出上/下扫频段频率[11~12],根据式(7)和式(8)计算可得目标距离和相对速度。当增加采样点数可以在采样频率不变的情况下增加分辨率,如果点数增加一倍,采样率也提高一倍,那么分辨率不变,但能识别的最高频率将提高一倍,这是采样点数增加的优点,带来的缺点是同时会减慢运算速度[13]。

图3 差频信号处理电路原理图
软件流程如图4所示,启动系统并初始化,进入AD采样,经FFT变换和谱峰搜索获取频率信息,根据上/下扫频段频率计算出目标距离和相对速度。
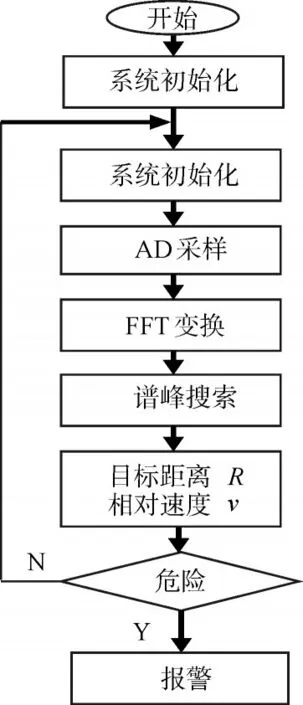
图4 数据采集系统软件流程图
5 结语
系统的前端FMCW雷达性能、差频信号的处理以及A/D的分辨率都会影响到测距测速的精度,提高前端雷达性能和减少差频信号受干扰程度,测量精度就能得到进一步提高。
基于FMCW雷达的差频信号采集系统具有性能稳定、结构相对简单、成本较低、功耗较小、精度较高等优点,在导弹炮弹引信、灌装液面高度测量、起重机防撞报警、车辆防碰撞主动安全预警等需要高精度近程测距的场合有着广阔的应用前景。
猜你喜欢
声学技术(2023年5期)2023-11-13 03:33:46
能源工程(2021年5期)2021-11-20 05:50:42
传感器与微系统(2017年7期)2017-08-09 01:34:14
河北大学学报(自然科学版)(2015年6期)2016-01-29 02:16:37
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年9期)2016-01-18 03:46:04
舰船科学技术(2015年8期)2015-02-27 15:38:48
海军航空大学学报(2015年4期)2015-02-27 13:45:51
电测与仪表(2014年17期)2014-04-04 11:56:48
振动、测试与诊断(2014年6期)2014-03-01 01:14:47
