
单镜头无人机进行倾斜摄影建模精度的探索★
2021-12-13 07:23刘才龙董泽进
山西建筑 2021年24期
刘才龙,董泽进
(安徽交通职业技术学院土木系,安徽 合肥 230051)
随着城市信息化发展,二维地图信息已经满足不了现代化的发展需求,测绘行业正努力朝三维数字化地图信息发展,无人机倾斜摄影航拍实景建模是能很好地恢复航拍区域实景的三维模型,而且是高精度的,具有色彩信息多元性数据[1]。对这个新型测量方法,无人机无论是固定翼还是多旋翼,其市价不菲,少则几十万元,多则上百万元,如此高昂的费用投入对大范围实景建模质量当然有保障,对于有实力的生产单位可以承受,而对于实力有限的单位去做这方面任务实在太难。那么对于小范围区域的倾斜摄影测量能否用比较经济航拍器代替。本文就是针对小范围区域用单镜头微型四旋翼无人机代替正常无人机去生产建模,其产生的平面精度到底能否达到大比例尺的要求,引起其精度的影响因素又是哪些进行了一些探索。
1 实景建模基本原理
实景建模基本原理是无人机在实景测绘区域上空按照规划好的航迹路线航摄,无人机下端安装一台五镜头合成相机对下面进行拍摄[2]。通过控制系统定时同拍5张不同角度的照片,1张是正拍获取正片,其余4张是一定角度斜拍,获取斜片[3]。沿规划的航线定时航拍时保证航向和旁向所拍的相邻照片有一定的重叠率,为后期建立立体模型提供了必要的条件[4]。
外业结束后,将航拍序列照片导入到电脑,通过倾斜摄影建模软件对这些序列照片进行空三计算,再进行图像配准和图像融合来完成图像拼接纠正处理,从而实现恢复现场的实景三维模型,这不仅包含了现场实物大小的恢复而且还包含对现场实景色彩的恢复,为大比例尺地形图数据获取与更新打下基础[5]。
2 微型无人机倾斜摄影测量的思索
微型四旋翼无人机不具备倾斜摄影测量的功能,由于自身轻小,承载能力低,电池容量小导致其两个关键方面很难实现,一是很难承载比较重的五镜头合成的相机进行航拍;二是续航能力弱,限制了更大范围的航拍作业。如果解决这两个问题就可以实现小型无人机三维倾斜摄影测量,但从小型无人机设计上看这两个问题都不能解决。唯一的办法就是如何利用现有的条件去实现。事实上是可以实现的,那就是采用单镜头对测绘区域分5个航线独立进行航拍,1个正拍航线,4个斜拍航线,正拍航线拍正片,斜拍航线拍斜片[6-7]。这是对正常无人机悬挂的五镜头作业工作进行分解去完成,最终都能获取一个航拍位一张正片,四张斜片,获得了立体像对的基本条件[8]。基于这样的基本原理推出下面微型四旋翼无人机实景建模过程。
3 微型四旋翼无人机实景建模过程
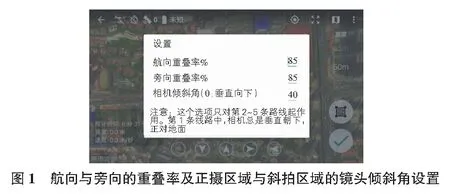
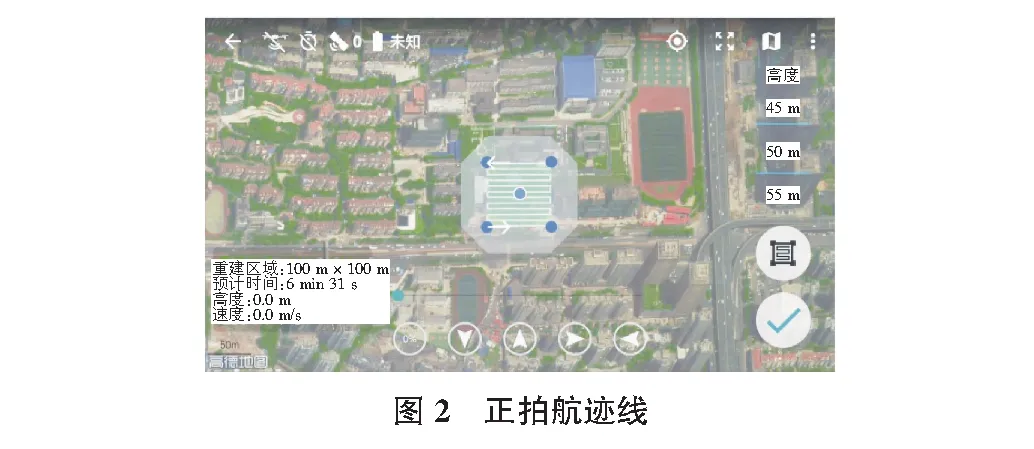
下面使用大疆微型四旋翼无人机御AIR这款,借助Altizure Beta第三方飞行控制软件对一个实景区域100 m×100 m小范围进行倾斜摄影试验。首先对小型无人机各部件安装到位,无人机摇控器与手机连接,并打开无人机及摇控器电源,通过手机打开大疆DJl GO 4 APP软件对无人机进行飞前安全自检,再打开Altizure Beta APP,对航拍区域进行设置。在APP软件中通过高德影像地图就能看到实测区域的影像,对需要航拍区域进行实线框选,然后设置航拍航向与旁向的重叠率及正摄区域与斜拍区域的镜头倾斜角度(见图1),以及航拍高度的设置。软件自动规划出5条航迹线,1条是正拍(见图2),4条是斜拍。飞机会按照这五个规划的航迹线正常拍摄,中间如果快没电时它会智能自检并自动飞回起飞位置,更换电池后再按照上次停拍的位置继续航拍,直至拍完5条航线为止。
将无人机航拍的5条航线的照片导入到电脑中保存留用建模。三维倾斜测量建模软件国内外常用的软件有好几款,这几款软件各有其优缺点,其中Context Capture倾斜摄影测量建模软件虽然使用相对比较复杂且价格较高,但模型纹理效果最为理想,输出格式多,精细度高,下面就以这款软件来对航拍区域进行建模[9]。
打开其中的Context Capture Center Master软件,新建工程项目,添加用于建模的航拍照片,并对像片进行自检。导入像控点坐标并刺点,提交空三运算,打开引擎软件Context Capture Center Engine启动空三运算,运算结束后,进入实景建模环节。点击右下角“提交新的生产项目”,依据电脑内存配置情况,对整体模型进行切块设置,再对建模格式及坐标系统进行设置,最后选择需要建模的瓦片进行建模,最终重建出摄影区域的三维模型及表面的纹理(见图3)[10]。

4 精度对比及影响因素
通过这种小型无人机建成三维模型形成的外围结构尺寸精度到底如何,下面在建模时把模型格式转化为OSGB,有了这种格式就可以在清华山维EPS中打开,依据三维模型,采用“以面代点法”,就可以精确地绘出房屋的平面图(见图4),通过平面图就可以量出房屋的边长。下面对照三维模型在图上量出模型的水平边长与现场实测值进行对比,为了保证现场实测的房屋的边长精度,边长的量取采用了达到毫米级精度的手持激光测距仪进行精密测量,由于其产生的误差只有几毫米,因此忽略不计,其测量值设为真值。在测量的若干条边长值中将测量的部分偏差值特别大的几个值去除,查其原因是在图上捕捉面的清晰度导致量距出现大的偏差,但这些值数量较小,统计结果如表1所示。

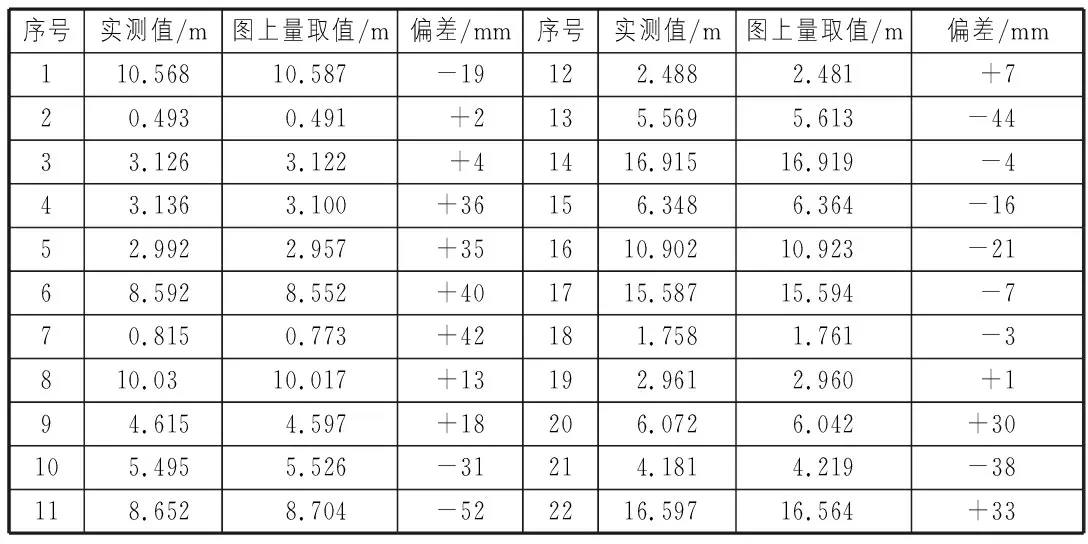
表1 数据分析
通过22组实测值与图上对应房边长度对比,偏差值最大的有-52 mm,最小的有+1 mm,按照一组同精度观测值中误差式(1)计算这组数据的中误差m值为±27 mm。通过这组数据还发现最大的偏差与最小的偏差值出现的比较少,偏差的大小与边长长度无关。如果由此实景建成的模型通过清华山维软件生成线划图DLG,消除捕捉模型上点位人为误差,依据国家的《1∶500外业数字测图技术规程》相近地物点间距中误差精度规定为±0.12 m,其精度完全可达到大比尺1∶500的平面测图精度要求[11]。
m=±[ΔΔ]n
(1)
5 结语
通过以上整理出的结果可知:使用单镜头微型无人机进行倾斜摄影建模,其平面尺寸精度整体很高,从转化平面图方面来看可以满足大比尺1∶500的平面测图精度要求,可以用于小范围的项目作业,个别部分测量值偏大可能与航拍时照片的清晰度有关,这个问题可以通过降低航拍高度和选择光线充足的天气作业来解决。
猜你喜欢
一重技术(2021年5期)2022-01-18
国画家(2021年4期)2021-10-13
现代企业(2021年2期)2021-07-20
华人时刊(2021年23期)2021-03-08
时代邮刊·下半月(2020年9期)2020-09-23
中学生数理化·八年级物理人教版(2019年9期)2019-11-25
中学生数理化·八年级物理人教版(2019年12期)2019-05-21
金桥(2018年6期)2018-09-22
电子制作(2018年11期)2018-08-04
小学生优秀作文(低年级)(2018年6期)2018-05-19
