无尾升力式飞行器Weissman判据图仿真
2021-12-10 11:47:40张石玉赵俊波张青青赵力宁
气体物理 2021年6期
张石玉, 赵俊波, 张青青, 赵力宁, 高 清
(中国航天空气动力技术研究院, 北京 100074)
引 言
面对称再入机动飞行器可实现大范围机动、 宽速域、 大空域飞行, 具有打击范围大、 作战响应快、 突防能力强等优点, 是当今高超声速武器装备发展的技术前沿.
与常规旋成体类再入飞行器相比, 面对称再入机动飞行器升阻比高, 采用大迎角姿态减速, 并采用倾斜转弯的方式改变飞行方向. 同时, 飞行环境和速度跨度较大: 从高空稀薄气体区到海平面的大跨度空域环境, 从高超声速到亚声速的飞行速度范围. 期间经历边界层转捩过程、 气动热烧蚀过程. 上述因素使得飞行器气动特性变化较大, 不确定度增高, 同时存在横航向气动耦合严重、 航向与纵向压心变化不一致、 气动非线性特性强等问题. 这使得按照横航向控制独立设计的传统设计方法无法满足面对称再入机动飞行器的综合指标要求, 需要研究考虑横航向气动耦合特性的飞行器设计准则.
在探索飞行器再入机动飞行技术的过程中, 早期学者已经意识到稳定性是制约飞行器研制的关键点, 在HTV-2之前的一系列研究中一直进行探索和改进. 然而仍未能完全摸清面对称再入机动飞行器的操稳特性, HTV-2飞行器首次试验即因横航向耦合失控而失败, 第2次飞行因气动热导致气动特性变化超出预期, 飞行器失控自毁.
对于再入机动飞行器, 稳定性判据是前期方案论证评估中最便利和有效的分析评估准则, 其中, Weissman判据图是评估横航向气动耦合稳定性和操控性的重要判据. Weissman判据图是Weiss-man[1-4]根据多个战斗机飞行试验和仿真结果总结归纳出的判据, 用于描述大攻角时飞机失速前的运动偏离过程及长时间运动偏离后的尾旋程度, 指导飞机的横航向稳定性设计. 诸多学者[5-9]将Weiss-man判据图应用于超/高超飞行器的设计中, 期望在设计早期就考虑控制的需求, 保证飞行器在气动稳定性和操纵性上具有良好的性能, 同时寻求与飞行器总体性能之间的平衡. 祝立国等[10-11]研究了某翼-体组合体简化模型的偏航动态稳定性参数CnβDYN和横向操纵偏离参数LCDP, 推导了航天坐标系下的判据形式, 分析了该判据与传统横航向稳定性判据的差异: 即传统判据没有计入两者的相互耦合效应, 同时无法预估滚控发散问题. 杜涛等[12]采用根轨迹分析方法研究了典型先进再入机动飞行器在CnβDYN和LCDP处于不同状态时的横航向稳定性, 并提出了飞行器的设计方向. 闵昌万[13]在Weissman判据图的基础上, 采用根轨迹图分析方法进一步完善了横航向闭环控制的稳定性判据. 陈功等[14]采用直接拉偏气动力系数并结合非线性仿真和Kriging建模的方法, 完成了HL-20飞行器Weissman判据图稳定性敏感区域的划分.
Weissman和陈功等均采用直接拉偏气动力系数方法研究Weissman图的稳定性分区. 然而这一拉偏过程缺乏气动外形作支撑, 使得拉偏后的气动数据可能远超出气动布局的设计范围. 本文以类HTV-2升力式飞行器为研究对象, 分析该飞行器在再入下压段的末段, 即气动载荷最大点的Weissman判据图分布特点. 本文的研究从飞行器基础外形出发, 通过调整关键外形参数来形成飞行器外形集, 并采用数值计算方法获得各外形对应气动参数, 最后结合飞行仿真技术和Weissman判据分区规则构建此飞行器的Weissman判据图.
本文的方法可应用于方案论证阶段的面对称再入机动飞行器横航向耦合稳定性设计, 为飞行器的进一步布局优化和控制策略设计提供支撑.
1 Weissman判据图及分区规则
Weissman判据图的横轴是偏航动态稳定性参数CnβDYN, 纵轴是横向操纵偏离参数LCDP. 两参数是由横航向4自由度线化动力学方程组的Routh稳定性分析而得, 详细推导过程参考文献[10-11].
CnβDYN表达式[10-11]如式(1)所示, 表征飞行器在受扰动后的横航向运动稳定性, 由于考虑了横航向的耦合作用,CnβDYN能更真实地反映飞行器的横航向运动稳定性. 通常随攻角增大, 飞行器航向稳定性大幅降低; 但横向稳定性随攻角增大而提高, 横航向的耦合作用使得横向稳定性弥补了航向稳定性的不足, 使得飞行器在部分大攻角区间保持横航向运动稳定性. 因此, 相对于传统的航向静稳定性设计判据Cnβ,CnβDYN放宽了对航向静稳定性的设计要求, 是更加宽松的设计判据, 为提升飞行器性能提供了可能.
(1)
LCDP表达式[10-11]如式(2)所示, 描述的是采用差动舵进行滚转控制时是否会发生操纵偏离. 当差动舵正向偏转(作负向滚转机动)时, 两差动舵也将产生负向偏航力矩(体现在控制导数Cnδa), 从而产生负侧滑角, 当横向稳定性Clβ较高时, 可能导致飞行器正向滚转, 从而产生与操纵方向相反的滚转运动.
(2)
横航向4自由度线化动力学方程组的Routh稳定性分析表明, 上述两参数小于零时飞行器横航向无控稳定、 滚控不偏离. 实际飞行试验及仿真研究表明: LCDP的稳定性边界是1×10-3量级的小值.
Weissman采用拉偏气动数据的方式获得大批量气动数据, 并对每组气动数据开展飞行仿真, 以仿真结果是否失稳为依据将判据图分成4个区, 如图 1[3]所示(调整为航天坐标系/前上右坐标系后). 4个区分别定义为:A区是稳定区,B区是无控稳定、 滚控失稳区,C区和D区是横航向耦合强发散区. 随后Weissman采用F-8, F-102, F-106和SAAB-37飞行器的飞行数据进行对比分析, 发现这些飞行器的偏离发散区与判据图的边界吻合良好, 证明该判据图预测偏离的可靠性.

图1 Weissman判据图Fig. 1 Weissman chart
Weissman对于B,C,D区没有给出明确的划分方法, 只是定性对比了各区的运动现象, 如“偏航发散更剧烈”“进入尾旋速度更早”“尾旋更平”等. 这样的定性描述无法用来定量确定B,C,D区的边界, 因此需要研究确定B,C,D区的划分方法.
参考文献[1-4,15]中对Weissman判据图不同分区的描述, 均提到了无控状态和滚转控制状态. 因此, 在分区研究中分别开展无控状态和滚转控制状态的飞行仿真分析, 界定各状态的划分区域. 在重复参考文献的仿真研究后, 通过不同分区的仿真结果对比分析确定Weissman判据图的分区标准, 如表 1所示.

表 1 Weissman判据图分区飞行现象Table 1 Phenomenon of each region in Weissman chart
对比各区域运动现象, 可以提取出几个关键点来区分不同区:A区和B,C,D区的区别在于,A区无控时不失稳, 滚控时滚转运动不反向;B,C区的差异在于无控时C区滚转偏航显著发散;C,D区的区别在于在无控情况下D区发生攻角发散. 此外, 长时间滚控机动后的飞行器尾旋特性如表 1所示,A区不发生尾旋,B区为陡尾旋,C区介于陡尾旋和平尾旋之间,D区为平尾旋. 经验证, 该分区规则与文献中的仿真结果完全一致.
2 无尾升力式飞行器
在确定Weissman判据图的分区规则后, 以类HTV-2升力式飞行器为对象, 开展Weissman判据图研究. 区别于文献中的拉偏气动系数方式, 本文采用调整外形的方式构建批量气动外形和气动数据, 并采用前文介绍的分区方法开展稳定性的飞行动力学仿真分析.
2.1 基础外形飞行器
基础外形飞行器参考HTV-2构型, 如图 2所示. 该外形为无立尾升力体布局, 前体侧缘后掠角70°, 飞行器总长3.85 m, 高0.614 m, 宽1.15 m, 机翼侧向有切屑长度0.9 m, 体尾部有两面水平安装的体襟翼; 两面体襟翼同向偏转控制俯仰, 反向偏转控制滚转.

图2 基础外形飞行器的三视图Fig. 2 Model of lifting body vehicle
2.2 调整外形飞行器
研究表明, 影响升力式飞行器横航向气动特性的主要外形参数包括: 前体侧缘后掠角、 前体侧缘上反角、 体身高度、 侧缘切削量大小、 体襟翼间距、 体襟翼尺寸. 因此本文在研究过程中单独改变上述外形参数, 形成的调整外形与基础外形对比如图 3所示, 图中黑实线为基础外形, 紫色、 蓝色实线为调整外形.

图3 调整外形与基础外形对比图Fig. 3 Configurations of reformed vehicles
具体调整尺寸如表 2所示.

表2 布局汇总表Table 2 Difference between reformed vehicles
3 Weissman判据图研究结果
参考再入机动飞行器的弹道, 以下压减速段的末段状态: 高度50 km,Ma=15作为分析点. 采用基于Newton理论的工程计算方法获得气动数据.
作为示例, 基础外形、 增后掠外形和增上反外形的横向稳定性导数Clβ和偏航稳定性导数Cnβ如图 4, 5所示. 由图可知, 无立尾的布局导致飞行器在全攻角范围航向不稳定, 同时小攻角下横向稳定性也较低. 随着攻角增大, 横向稳定性显著增强.

图5 典型外形航向稳定性导数Fig. 5 Directional stability derivative of typical configurations
各外形的偏航动态稳定性参数CnβDYN和横向操纵偏离参数LCDP如图 6, 7所示. 在小攻角时, 飞行器的CnβDYN大于零, 处于不稳定状态; 随着攻角增大, 由于横向稳定性导数Clβ显著增大, 横向稳定性的增稳作用使得横航向气动耦合稳定性参数CnβDYN变得稳定. 横向操纵偏离参数LCDP始终大于零, 且随攻角增大而增大.

图6 各外形偏航动态稳定性参数Fig. 6 Dynamic directional stability parameter

图7 各外形横向操纵偏离参数Fig. 7 Lateral control departure parameter
结合气动特性分析结果, 对各外形的多个攻角状态开展无控和带开环滚转控制的6自由度飞行动力学仿真, 研究不同CnβDYN条件下的攻角、 侧滑角和姿态角是否发散; 不同LCDP条件下是否发生滚转反向. 滚转控制仿真时, 滚转舵偏为正向偏转1°.
图 8, 9分别为无控时横航向稳定和失稳时的典型仿真结果; 图 10, 11分别为滚转控制条件下滚转不反向和反向时的典型仿真结果.
由结果可知, 当CnβDYN失稳时, 飞行器滚转角发生单向发散偏离(见图 9), 同时偏航角也出现大幅震荡现象. 当LCDP失稳时, 飞行器发生滚转控制反向, 即正滚转舵偏产生正滚转角(见图 11).
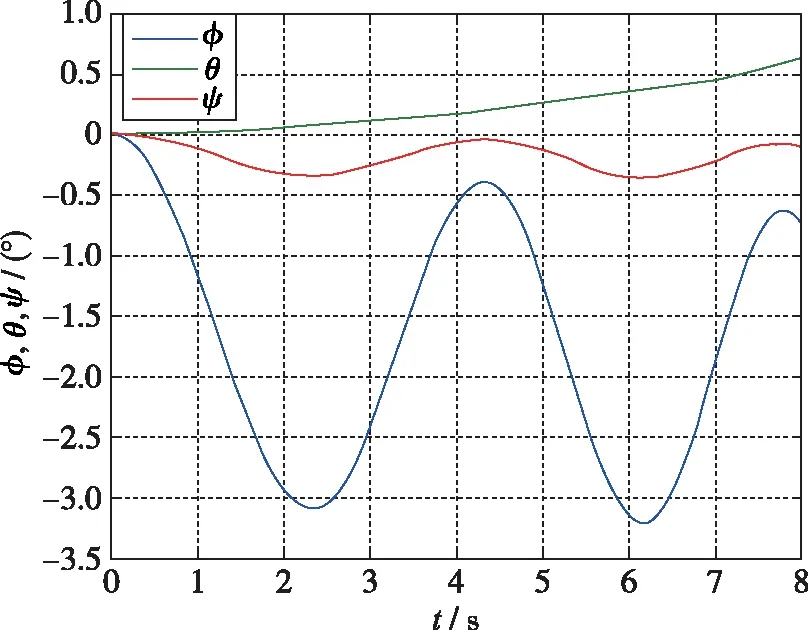
图8 增上反角布局无控条件的姿态角(2-1, α=10°)Fig. 8 Attitude angle of dihedral-angle-increased vehicle in uncontrolled simulation(2-1, α=10°)

图9 增后掠角布局无控条件的姿态角(1-1, α=10°)Fig. 9 Attitude angle of sweep-angle-increased-vehicle in uncontrolled simulation (1-1, α=10°)

图10 增后掠布局开环滚控条件的姿态角(1-1, α=5°)Fig. 10 Attitude angle of sweep-angle-increased vehicle in aileron-controlled simulation (1-1, α=5°)

图11 增上反角布局开环滚控条件的姿态角(2-1, α=5°)Fig. 11 Attitude angle of dihedral-angle-increased vehicle in aileron-controlled simulation (2-1, α=5°)
根据仿真结果判断CnβDYN和LCDP的稳定性边界, 可以构造出本文研究的类HTV-2升力式飞行器的Weissman判据图, 如图 12所示.

图12 无尾升力式飞行器Weissman判据图Fig.12 Weissman chart of tailless lifting body
由图可知,CnβDYN的稳定性边界近似为0. 当CnβDYN>0时, 无控横航向运动显著失稳; 当CnβDYN<0时, 无控横航向运动稳定; LCDP的稳定性边界位于0.001 67~0.001 75范围内, 当LCDP≤0.001 67 时滚转舵控制不反向(正滚转舵产生负滚转角); 而LCDP≥0.001 75时滚转舵控制反向(正滚转舵产生正滚转角). 两个边界将Weissman判据图分为4个区域, 分别为A,B,C/D和F区.
A区为稳定区, 该区域的飞行器横航向无控和滚控均稳定. 该区对航向稳定性要求较高, 飞行器需要具备较大的立尾等提高航向稳定性的气动布局, 这将严重降低飞行器升阻比. 本文飞行器在该区域没有状态点.
B区为轻度失稳区, 该区域无控不失稳或滚转轻度失稳, 但滚控将导致滚转运动反向. 当飞行器位于该区域时, 采用常规控制策略将导致滚控反向失控; 可采用考虑耦合的控制策略控制飞行器. 本文飞行器在中等至大攻角时(α>10°)位于该区域, 此时随着攻角增大, 横向稳定性增高的量值高于航向稳定性降低的量值, 使得CnβDYN由失稳区恢复至稳定区, 但同样由于航向稳定性降低, 横向稳定性增高, 导致LCDP增大并进入滚控反向区域. 由此研究可知, 类HTV-2飞行器在下压段末段的大攻角飞行试验段均在Weissman判据图的B区.
C/D区为中度失稳区, 此时飞行器无控横航向失稳、 滚控滚转运动反向. 对于无航向增稳能力的飞行器, 采用常规控制手段和利用耦合的控制手段都无法实现稳定控制, 因此应避免将飞行器设计在该区域; 对于有航向增稳能力的飞行器, 可考虑首先进行航向增稳控制, 将该区飞行状态调整至B区, 之后采用考虑耦合的控制手段可实现稳定控制; 本文飞行器在小攻角至中等攻角时(5<α<15°)位于该区域, 因此如果对该飞行器进行布局优化, 则需要在小、 中等攻角时提高航向稳定性或降低横向稳定性, 使得飞行器进入B区.
F区为中度/强烈横航向失稳区, 此时飞行器无控横航向中度或强烈失稳, 滚控滚转运动不反向. 对于无航向增稳能力的飞行器, 采用常规控制策略和增稳措施均难以实现稳定控制; 对于有航向增稳能力的飞行器进行航向增稳控制, 可能将该区飞行状态调整至A区, 之后采用常规控制策略实现稳定控制; 本文飞行器在小攻角(0°<α<5°)时位于该区域, 此时飞行器航向稳定性导数Cnβ>0, 航向失稳, 而横向稳定性导数Clβ也较低, 同时由于攻角较小, 横向稳定性在对航向的增稳作用有限, 使得CnβDYN中度或强烈失稳; 同样由于横向稳定较低, 同时滚控诱导偏航力矩相对较小, 使得LCDP量值较小, 滚控不反向.
根据上述Weissman判据图及其划分边界、 稳定性结果以后, 可指导飞行器的布局设计方向. 根据分析结果可知, 本文的类HTV-2飞行器气动特性分布主要在B区, 此时采用考虑耦合的控制策略可实现飞行器稳定控制, 如此可兼顾气动性能和可控性.
4 结论
本文详细介绍了Weissman判据图的分区规则, 并以无尾升力式飞行器为对象, 研究了Weissman判据图分区边界及各区的运动特点. 研究表明, 无尾升力式飞行器主要气动特性分布在Weissman判据图的B区, 该区域无控横航向运动稳定, 滚控滚转运动反向, 常规控制策略无法稳定控制, 需要利用耦合的控制策略来实现飞行器的稳定控制.
本文的方法可应用于方案论证初期的面对称再入机动飞行器横航向耦合稳定性设计. 首先通过大幅调整外形形成外形库, 之后运用数值计算或工程方法获得气动数据库, 最后运用飞行仿真手段, 结合本文提出的Weissman判据分区方法, 获得飞行器的Weissman判据分区图, 从而为飞行器的进一步布局优化和控制策略设计提供设计依据.
猜你喜欢
作文·小学中高年级(2022年6期)2022-04-12 00:00:00
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
宇航总体技术(2019年5期)2019-10-11 07:32:56
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
北京航空航天大学学报(2017年7期)2017-11-24 05:27:22
电子制作(2017年24期)2017-02-02 07:14:16
戏剧艺术(上海戏剧学院学报)(2016年1期)2016-01-23 02:35:08
中国医疗美容(2015年1期)2015-07-12 10:06:33
振动与冲击(2015年2期)2015-05-16 05:37:34
空气动力学学报(2015年3期)2015-04-14 08:42:40