基于关联成像的气缸盖内壁影像检测方法研究
2021-12-10 06:46张皓宇杨风暴王肖霞
内燃机工程 2021年6期
张皓宇,杨风暴,王肖霞
(中北大学 信息与通信工程学院,太原 030051)
0 概述
气缸盖作为内燃机气缸的核心部件之一,其主要功能是将气缸密闭形成封闭空间,承受高温高压的工作环境。气缸盖上分布有多个气门、喷油孔、螺栓和其他组件,在气缸非稳定工况下气缸盖内壁极易产生磨损、凹陷、破裂等损坏,这将导致气缸各部件相互间的协调紊乱,影响内燃机气缸的工作性能[1-3],因此需对气缸盖内壁的状况进行检测。目前常规的气缸盖内壁检测方法需将气缸拆卸进行水压、气压及目视等专项检测再重新组装调试,存在检测时间长、耗费人力多、成本消耗较大等缺陷[4-5];而借助计算机模拟软件对气缸盖进行有限元分析,通过温度的变化规律及应力应变分析预测气缸盖内壁容易出现危险点的位置,难以直观体现影响气缸正常运行的主要原因,且建立气缸盖模型时缺乏切实可靠的边界条件使得模拟结果与实际存在差距[6-12]。综上所述,需要一种新型的更为直观的方法来实现对气缸盖内壁的检测。
影像技术在医学、夜间探测等领域逐步获得广泛的应用[13-14]:将影像技术应用于医学X光诊断中,可实现对人体内部器官、组织、肿瘤等的成像,辅助医生对患者进行诊断,提高治疗方案的准确性;将红外检测技术用于夜间行车探测,通过红外热像仪获取路面目标图像,识别行人、车辆等目标,可为夜间行车安全提供保障[15]。如果在气缸盖内壁的检测中引入影像技术,直观呈现气缸盖内壁影像,将利于气缸盖内壁的有效探测。然而,气缸盖内壁位于气缸内部,处在高温高压的恶劣环境中,若要获得相关图像信息需将探测器放入气缸内部,而传统的影像技术无法对气缸盖内壁完美呈现,因而选择关联成像。关联成像[16-17]又称鬼成像(ghost imaging, GI),是一种新型的成像方式。其原理与传统光学成像不同,目标图像无需直接获取,而是由两部分探测数据进行关联计算得到,且探测过程与重构影像过程完全独立。光场关联成像的探测过程收集了不同的光场分布信息及相应作用于目标后的总光强,而重构过程则是通过光场分布与总光强值关联计算来还原出目标影像。利用关联成像原理分离热探测过程与影像重构过程,在气缸盖上布置传感器测点,收集内壁的热能量场分布和外壁的总热量,再通过计算机对数据进行关联重构影像,这种方式恰好可以解决传统影像技术无法利用图像探测器直接获得气缸盖内壁影像的问题。
本文中针对目前气缸盖内壁检测效率低且难以直观体现的问题,利用关联成像原理来实现气缸盖内壁影像的有效探测。采用压缩感知关联成像方法(compressed sensing ghost imaging, CSGI)对气缸盖内外壁两部分数据进行关联运算,实现气缸盖内壁影像的间接获取。通过数值仿真,利用峰值信噪比及结构相似性等定量评价指标,结合重构影像的直观性分析验证了关联成像应用于气缸盖内壁影像检测的有效性。该方法可针对发动机缸内高温高压环境中无法对发动机缸盖等热负荷严重的关键部件进行直观分析的问题提供一种新的分析手段,利于对缸盖内壁磨损区域进行有效判定。
1 结合气缸盖工作规律的关联成像分析
内燃机在高温高压的工作环境下,气缸盖易在热应力的作用下产生磨损、开裂等问题。图1为气缸盖底板的热能传递示意图。在气缸盖获得来自燃烧室的热能量后,热能由底板内壁火力面①区域向外壁②区域传播,在这一过程中,热能在气缸盖内主要以热传导的方式传递[18-19]。

图1 气缸盖底板的热能传递
热传导过程遵循导热基本定律——傅里叶定律,如式(1)所示。
(1)
式中,Φ为热流量;A为传热面积;λ为热导率;T为温度;x为壁面厚度。
气缸盖内壁的热能量场关联成像[20]与传统光场的关联成像原理相同,需要通过气缸盖内壁热场分布和气缸盖底板外壁总能量值两部分数据来实现成像,如图2所示。其中,气缸盖内壁热场分布记录的是气缸运行的N个时刻缸盖内壁每一点的热能值,记作Ia(x,y;N);气缸盖底板外壁总能量值则是内壁热场与气缸盖相互作用后底板外壁对应每个点透过的热能值的叠加值,记作Ib(t)。由于内壁影像是由气缸盖内壁每一点的计算结果叠加而成,那么就需要不断改变热场Ia(x,y;N),同时收集Ib(t),以获得足够的数据量。最后将收集完成的数据信息导入计算机,通过关联运算重构出气缸盖内壁影像。
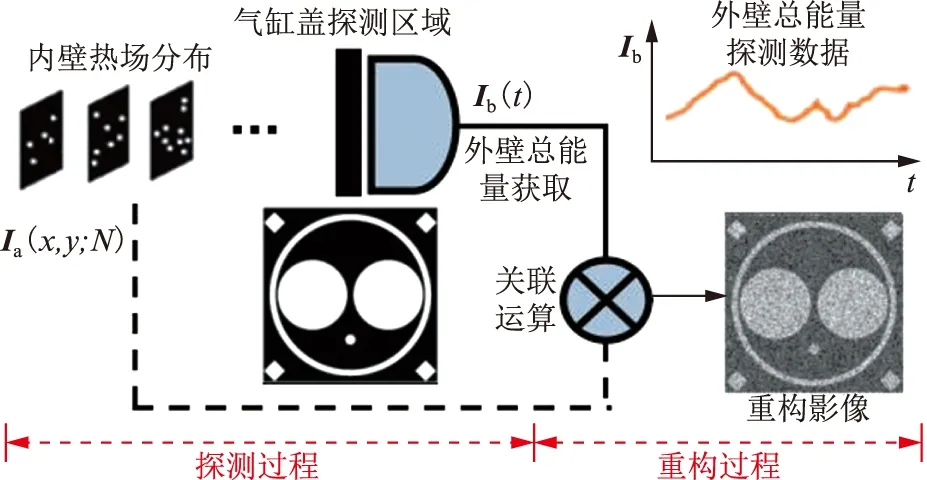
图2 气缸盖热场关联成像原理图
结合以上分析,将气缸盖底板热透过系数函数用T(x,y)表示,那么热场与气缸盖底板相互作用后的总能量值Ib可表示为式(2)形式。
(2)
再通过外壁总能量值Ib与探测的内壁热场分布Ia(x,y) 相互关联,重建目标对象TGI(x,y)如式(3)所示。
(3)
为获得高质量的气缸盖内壁影像,整个探测过程需获得多组不同的气缸盖内壁热场分布Ia(x,y)及对应的外壁总能量值Ib,所需的数据可使用热电偶在内燃机不同工况下按时刻连续收集。结合文献[21-22],在气缸加速工作再到减速工作这一过程中,通过气缸盖内壁不同区域的温度场分布计算气缸盖内壁热场分布。缸盖内壁测点位置如图3所示。由于气缸盖内壁温度分布具有从中心沿径向递减的特点,以四气门气缸盖为例,在各气门围绕的中间位置布置测点,其中点1~3为纵向从排气门侧向进气门侧分布的测点,点4~8为进排气门间横向分布的测点。图4为各测点的温度随时间的变化曲线。

图3 缸盖内壁测点位置分布
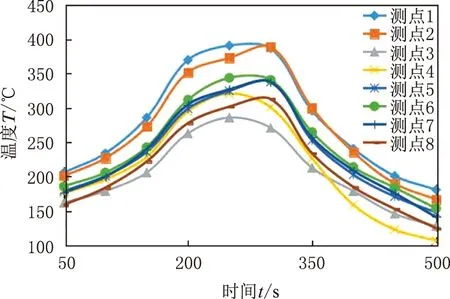
图4 缸盖不同位置测点的温度变化曲线
分析图4可知,在气缸由加速工作到减速工作这一过程中,缸盖内壁温度随着时间的推进呈现先上升后下降的连续变化,最高温度约为400 ℃。但缸盖内壁各测点的变化量是不同的,这样的变化也体现为相应气缸盖内壁各点热能不同,从而使得每次采集的热场Ia(x,y)之间具有较大的差异性。本研究正是利用这样的差异性特征为后续热场矩阵的数据模拟及关联成像技术的运用提供了基础条件。
2 原理和方法
获得高质量气缸盖内壁影像的关键在于数据的采集及关联方法的选择。数据采集的目的是获取气缸盖内壁热场分布及气缸盖外壁总能量值,为关联成像提供足够的计算数据。关联方法会对关联计算采用的数据量、关联计算的时间及最终成像质量产生影响。
2.1 关联数据的采集
由于气缸盖内壁分布的热场可由气缸盖内壁的温度分布情况计算,本研究中利用传统的热电偶测量方式对气缸盖热场进行收集。内燃机运行由 700 r/min 加速至4 000 r/min,在这一过程中按不同时刻使用阵列式热电偶对气缸盖内壁进行一系列的热场收集;同时在气缸盖外壁区域布置贴片式热敏电阻,将各个区域的能量值叠加作为气缸盖外壁的总能量值。在使用关联成像对气缸盖影像进行计算获取时,遵循“内壁热场分布与气缸盖底板热透过率函数的乘积等于气缸盖外壁总能量值”的原则,将系列的气缸盖内壁热场与外壁总能量值一一对应。
选择在不同工况下采集数据的主要原因为内燃机在不同转速、不同功率及不同负荷的工况下工作时,气缸盖内壁受到的影响形式不同,会引起内壁热场的分布变化较大,收集的数据组实现线性关联运算时容易得到更多像素点位置的解,这将明显提高重构影像的质量。
2.2 压缩感知关联成像法
采用压缩感知关联成像法[23]对探测的数据进行关联计算能够提高气缸盖内壁重构影像的质量。作为一种新型的信号处理方法,压缩感知理论可在获取可压缩信号的同时重建稀疏信号,相较于奈奎斯特采样理论,它通过开发信号的稀疏特性用随机采样获取信号的离散数据样本,提高数据间的不相干性,用较少的采样次数通过非线性重建算法还原出气缸盖内壁重构影像。其关键在于信号的稀疏结构和不相关性。该过程涵盖稀疏表示、压缩观测和信号优化重构3个部分。
使用压缩感知关联成像方法重构气缸盖内壁影像的过程如图5所示,分为以下几个步骤:(1) 将气缸盖底板热透过系数T(x,y)(后文简写作T)展开为M×1的列向量,在稀疏变换域下表示为式(4)形式。

图5 压缩感知关联成像方法重构气缸盖内壁影像步骤
T=ΨS
(4)
式中,稀疏矩阵Ψ为M×M维的正交完备基矩阵;S为T在稀疏矩阵Ψ上的系数矩阵。(2)选取N个适合的气缸盖内壁热场强度分布矩阵Ia(x,y)按行展开并组合作为测量矩阵Φ,确保能最大限度保留信号T中的信息,大小为N×M(N≪M)。那么,气缸盖外壁探测结果Ib可构成一个N×1的数据向量Ib,表示为式(5)形式。
Ib=ΦT=ΦΨS
(5)
(3)通过压缩感知测量矩阵Φ重构信号,由Ib来关联计算目标对象TCS,即可转为求解最小l1范数下的最优化,满足式(6)所示条件。
TCS=argmin‖ΨS‖l1s.t.Ib=ΦT=ΦΨS
(6)
根据正交匹配追踪(orthogonal matching pursuit, OMP)算法,重构出稀疏系数S的近似解S′后,再由相应的正交稀疏基Ψ,通过公式(6)即可获得气缸盖内壁信息T的近似解TCS,完成目标的重构。
3 仿真试验分析
为了验证气缸盖内壁关联成像技术的有效性,本研究中选用了3幅128像素×128像素的气缸盖模型二值图,即单缸双气门、单缸四气门和双缸双气门模型图作为目标进行试验。仿真中使用的N个热场分布矩阵Ia(x,y)是由MATLAB软件根据气缸盖内壁热场分布规律区域性增强后随机生成,气缸盖外壁探测结果Ib则通过式(5)获得。对于气缸盖内壁区域的影像图还原,只需使得像素点的尺寸远小于探测区域,以保证气缸盖内壁影像的还原质量。这里为了客观地评估重构的气缸盖内壁影像的质量,引入峰值信噪比(peak signal to noise ratio, PSNR)和结构相似性(structural similarity, SSIM)两个指标进行定量分析,计算方法如式(7)和式(8)所示。
(7)
(8)
(9)
式中,IMSE为原始图像与重构图像的均方误差(mean square error, MSE);f(x,y)与f′(x,y)为相同位置对应的第(i,j)个像素点的原图和重构影像;M=n×m,为总像素点个数;T表示原图像信息;T′表示重构影像信息;μT、μT′为T、T′的平均值;σT、σT′为T、T′的方差;σTT′为T、T′的协方差;c1、c2为常数,是为了避免分母为0而维持稳定。
图6~图8为单缸双气门、单缸四气门和双缸双气门气缸盖的二值模型图及不同采样次数下的重构影像图。从图中可以直观看出,重构出的气缸盖内壁影像可将气缸盖内壁上进排气门口、喷油孔、圆环凹槽及各受热区域完整呈现,且随着关联计算采样次数的逐渐增加,气缸盖内壁影像的清晰度也迅速提高。这是由于在达到全采样前,每一次采样数据都可能会为气缸盖内壁影像的重构补充有效信息,而随关联计算结果的不断完善即图片像素点数据的不断补充,重构图像也将越来越接近实际图像。但关联计算采样次数增多的同时也增加了对大量的冗余信息的处理,会使计算时间大大延长。试验结果表明,4组采样次数下3种气缸盖模型图的重构时间分别为143.4 s、263.8 s、379.7 s、509.9 s。根据以上分析,关联成像的重构时间受到原模型图像素尺寸大小及关联计算采样次数的影响而与气缸盖类型无关,因此在实际试验时可选择合适的采样率以减少关联计算消耗的时间。
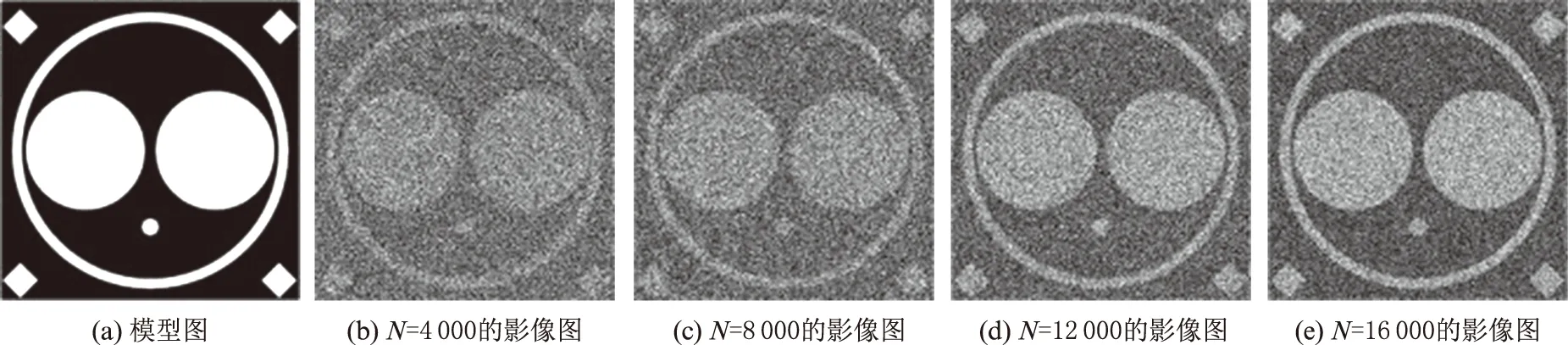
图6 单缸双气门模型图及不同采样次数下的重构影像图
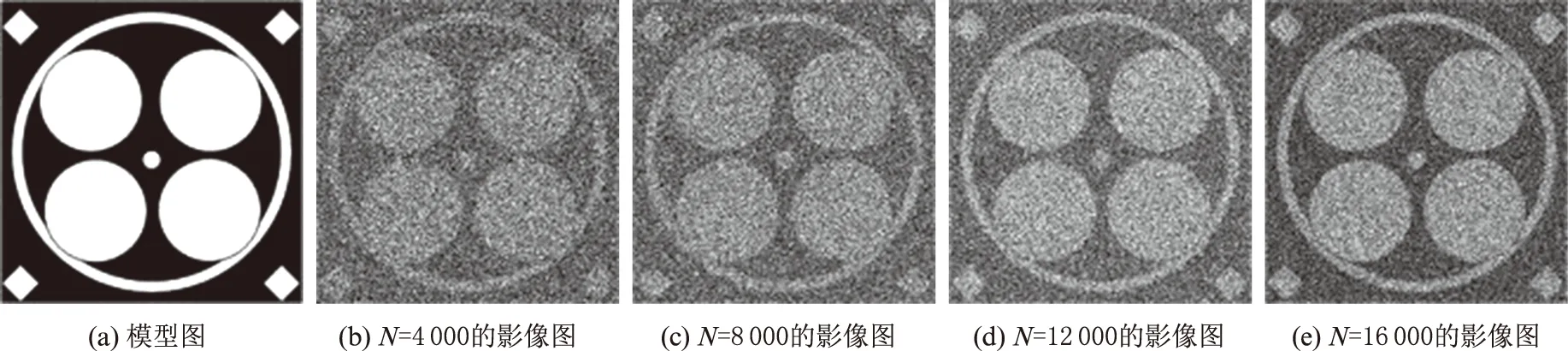
图7 单缸四气门模型图及不同采样次数下的重构影像图
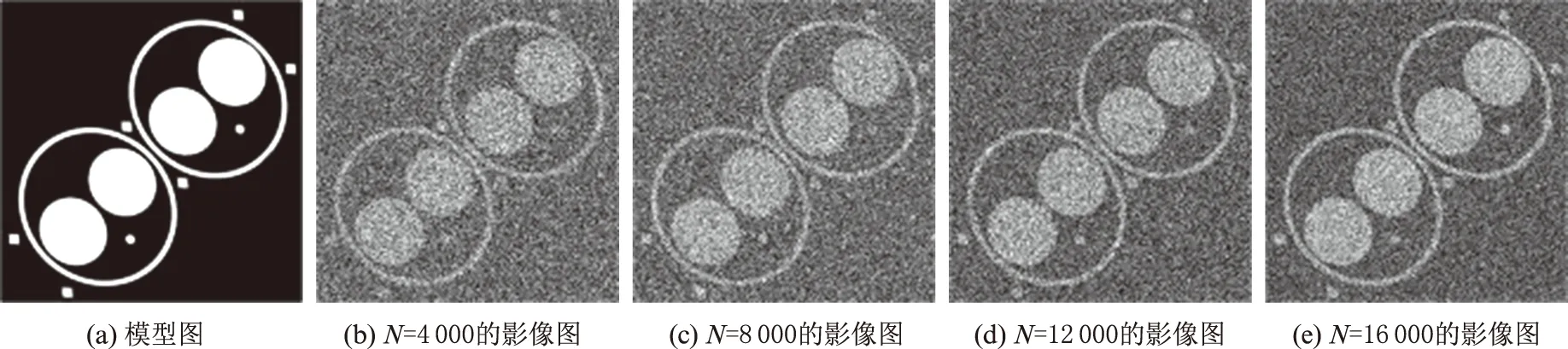
图8 双缸双气门模型图及不同采样次数下的重构影像图
为了更好地体现方案的有效性,图9给出了在不同采样次数下气缸盖内壁影像的PSNR和SSIM两个指标的曲线图。峰值信噪比PSNR的大小可判断重构图像的失真程度,结构相似性SSIM指标则定量地从数值上评判重构图像恢复的质量。由图 9(a) 可知,在采样次数达到4 000后,单缸双气门与单缸四气门重构影像的PSNR在62 dB左右,双缸双气门的PSNR则达到65 dB以上,且随着采样次数增加逐渐升高,PSNR数值升高,这代表着重构图像的失真越来越小。再对图9(b)中SSIM变化曲线进行分析,采样次数低于4 000次时,关联计算获得的有效数据较多,结构相似性指标迅速上升,在采样次数到达10 000次后,各像素点数据逐步完善,冗余信息较多,重构影像质量提升缓慢并趋于平衡。综合两项性能指标曲线图分析,随着采样次数的增加,重构图像的PSNR和SSIM都随之提升,且采样次数达到8 000次后,PSNR最高可达66 dB且SSIM的值也都在0.4以上,利于气缸盖影像的高质量重构。结合图6~图9进行分析,单缸双气门和单缸四气门气缸盖的SSIM性能指标高于双缸双气门,重构影像中双缸双气门少部分区域对细节的显现不够完美。这是由于重构影像图质量受到原图尺寸大小、像素点个数及有效识别区域复杂程度的综合限制,压缩感知关联成像法未能对每个像素点精确恢复,但总体效果仍比较理想。若使用更高像素的气缸盖模型图并采集足够多的试验数据,那么还原的气缸盖内壁影像将更清晰,同时选择更优化的关联成像方法也会提升重构影像质量。
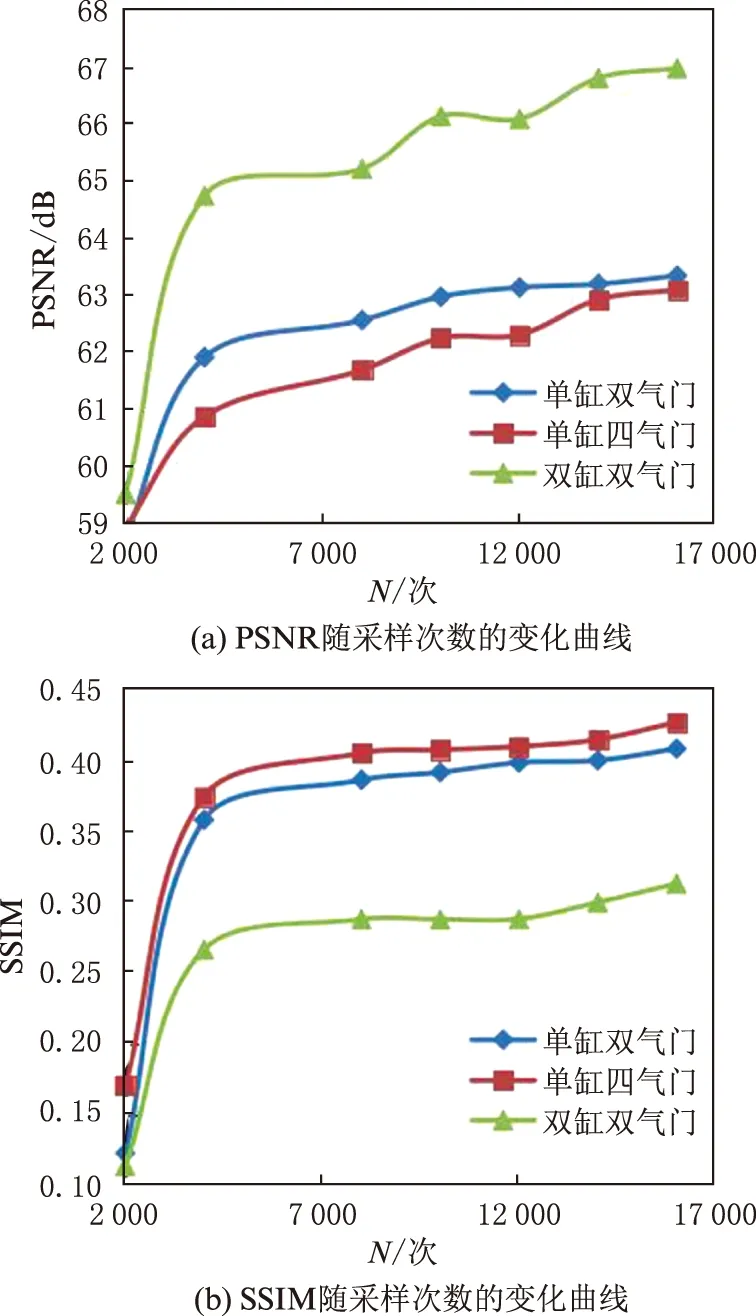
图9 不同采样次数下气缸盖内壁重建影像的性能指标曲线
气缸盖常见的损伤主要有变形、开裂及腐蚀,而对气缸盖内壁影像磨损区域进行分析时,主要考虑火力面的凹陷、裂纹和凸起损伤。在出现这些问题时,气缸盖底板上的热能传递距离、温度梯度、导热系数等参数变化使得对应位置点的热透过系数T(x,y) 发生改变,这也将直接显现为磨损区域的重构影像变化。
为了通过仿真试验验证缸盖磨损区域的评估的有效性,将各类气缸盖模型图作缺陷处理,再对其进行模拟分析以验证实际成像效果。图10、图11分别为单缸双气门和单缸四气门气缸盖处理后的原模型图及采样次数为4 000次、8 000次、12 000次、16 000次的重构影像图,对应的相同采样次数下各组的重构时间平均为141.2 s、264.5 s、381.3 s、511.8 s。由于重构影像图是通过关联成像法求解计算出各像素点位置的数据并叠加还原得到的,那么为使磨损区域影像能够清晰显现,则要求构成气缸盖内壁区域的像素点个数足够多,气缸盖内壁模型图的像素尺寸就不能太小。根据图10、图11各组仿真试验结果进行分析,单缸双气门气缸盖进排气门间出现细小裂纹时的情况,4种采样次数下的SSIM指标分别为0.366、0.396、0.413、0.424;单缸四气门气缸盖表面出现气泡等凸起或凹陷情况,4种采样次数下的SSIM指标分别为0.375、0.408、0.417、0.436。从重构影像图来看,可以清晰分辨气缸盖内壁的缺陷区域的位置和尺寸信息,为气缸盖内壁具体缺陷类型的判定提供了重要的依据。

图10 单缸双气门气缸盖磨损情况下的原模型图及重构影像图

图11 单缸四气门气缸盖磨损情况下的原模型图及重构影像图
4 结论
(1) 基于关联成像的气缸盖内壁检测方法能够在气缸运行过程中对气缸盖进行检测,能直接呈现气缸盖内壁影像,直观性强,利于气缸盖火力面的检测分析。
(2) 对3种类型气缸盖重构影像的仿真试验结果表明,相应的PSNR和SSIM指标可达66.79 dB、0.427。结合存在缺陷区域的气缸盖重构影像分析,关联成像法仍能清晰地显现内壁影像并能准确辨识缺陷区域信息。
猜你喜欢
导弹与航天运载技术(2022年2期)2022-05-09
文物季刊(2021年1期)2021-03-23
小学阅读指南·高年级版(2020年4期)2020-06-15
山东工业技术(2019年11期)2019-05-30
汽车文摘(2017年6期)2017-12-06
汽车文摘(2017年10期)2017-12-04
发明与创新(2016年5期)2016-12-18
汽车与新动力(2013年4期)2013-03-11
汽车与新动力(2013年4期)2013-03-11
汽车与新动力(2013年3期)2013-03-11