
基于机器视觉的工业仪表识别技术研究
2021-12-08 11:40苏乾贺旭杰燕晓龙赵鑫
今日自动化 2021年9期
关键词:机器视觉
苏乾 贺旭杰 燕晓龙 赵鑫
[摘 要]在工业仪表自动识别中应用机器视觉技术可以有效实现工业生产的自动化,将工业仪表识别和数据提取从人工转化为机器视觉,机器视觉相较于人工识别更加准确高效,并且运行稳定,可以有效提高生产效率与质量,将工作人员负担与压力大大减轻,并且减少成本投入。文章主要研究基于机器视觉发展的工业仪表识别技术,从工业仪表的自动获取算法,图像预处理,工业仪表区域数据提取,指针仪表识别以及数字仪表识别等方面进行研究,促进基于机器视觉的工业仪表识别技术的健康发展。
[关键词]机器视觉;工业仪表;识别技术
[中图分类号]TP391.41 [文献标志码]A [文章编号]2095–6487(2021)09–0–02
[Abstract]The application of machine vision technology in the automatic identification of industrial instruments can effectively realize the automation of industrial production, and transform the identification and data extraction of industrial instruments from manual to machine vision. Compared with manual identification, machine vision is more accurate and efficient, and runs stably, which can effectively improve the production efficiency and quality, and greatly reduce the burden and pressure of staff, And reduce cost investment. This paper mainly studies the industrial instrument recognition technology based on the development of machine vision, from the aspects of automatic acquisition algorithm of industrial instrument, image preprocessing, regional data extraction of industrial instrument, pointer instrument recognition and digital instrument recognition. Promote the healthy development of industrial instrument recognition technology based on machine vision.
[Keywords]machine vision; industrial instruments; identification technology
1 指针工业仪表读数识别
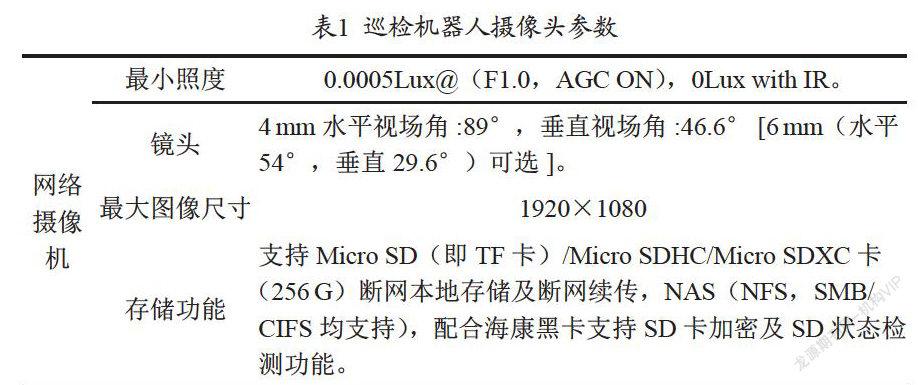
目前大部分仪表识别算法是建立在识别仪表图像的基础上,通过对拍摄的仪表图片进行识别来获取具体数值。工业生产环境较差,部分情况周围环境较暗甚至需要安装辅助光源对仪表表盘进行照明。目前部分工业现场条件较差,不能全部安装摄像头,并且部分仪表不需要全天候实时监控,只需要定期由巡检人员对仪表数据收集记录,在每个仪表旁安装摄像头会造成成本浪费。使用巡检机器人代替固定摄像头是工业生产自动化的重要措施,通过巡检机器人移动对工业仪表数值进行识别,可以有效降低投入成本并且提高图像采集质量与效率。但是巡检机器人相较于传统机位拍摄,由于位置与角度的不确定,必然会造成图像傾斜或扭曲,因此图像矫正是识别工业仪表读数的必要前提。巡检机器人摄像头参数见表1。目前工业仪表分为指针式仪表与数显式仪表两类,指针式仪表读数识别需要从复杂背景中将仪表表盘区域进行提取,预处理表盘区域,方便后续数据读取。在工业生产中指针式仪表种类众多,读数范围具有较大差异,因此不同仪表之间缺乏固定识别方法,首先可提取指针式仪表表盘刻度图像,对仪表刻度的起始角度和读数范围进行获取,再通过霍夫直线变换对指针位置进行检测,对仪表指针通过最小二乘法进行拟合确定指针角度,最后通过指针与仪表盘映射关系来获取具体数据。
存储功能 支持Micro SD(即TF卡)/Micro SDHC/Micro SDXC卡(256 G)断网本地存储及断网续传,NAS(NFS,SMB/CIFS均支持),配合海康黑卡支持SD卡加密及SD状态检测功能。
1.1 预处理指针式仪表图像
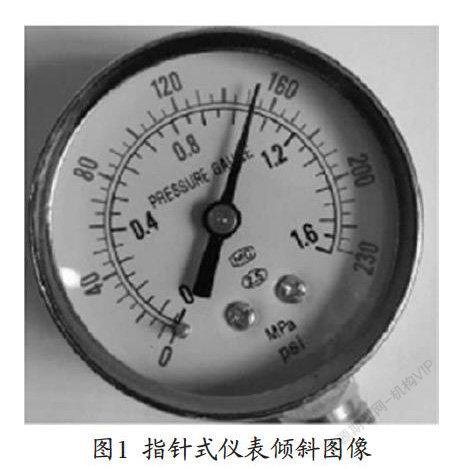
指针式仪表图像预处理是识别仪表数据的重要前提,由于巡检机器人摄像头与仪表很难保持水平角度,因此首先对图像矫正处理拍摄角度。在工业生产中巡检机器人实际拍摄中极易出现角度倾斜导致获取的表盘图像出现扭曲或倾斜,进而造成方向旋转或偏移,给后续图像识别造成阻碍与误差。指针式仪表倾斜图像如图1所示。
实际中,巡检机器人仪表图像采集中经常会出现上下偏移,左右偏移以及近大远小的问题,因此为了进一步提高指针式仪表数据读取的精确性,可采用透视变换仪表图像倾斜矫正算法。该算法主要分为两部分,首先巡检机器人摄像头将倾斜仪表的图像获取,根据拍摄情况建立透视变换矩阵,然后矫正倾斜仪表图形。通常将变换透视也称为投影映射,沿着一个方向将图片投影在另一个平面上,将投影中心设置为摄影机位置,透视模型包括投影中心,源图像平面以及新图像平面。通常巡检机器人获取图像视为新图像平面物体图像,当摄像机位置也就是投影中心发生变化,图像产生倾斜时,由于两个平面之间存在一定角度,因此图像获取会发生扭曲或倾斜。图像在透视变换后对应点会发生变化,为了矫正指针仪表图像会通过实际图像与拍摄图像之间像素关系进行矫正变换,确保获得的仪表图像清晰明确。
1.2 仪表表盘刻度提取
在工业生产中,根据实际用途分为不同种类仪表,仪表刻度也会随测量参数产生变化造成指针式仪表应用机器视觉技术自动识别难度较大。获取指针式仪表数据首先要获得仪表的刻度与仪表指针方向,由于指针式仪表结构为圆形,仪表刻度也呈圆形分布,圆形的圆心位于指针转轴上。指针式仪表自动识别算法一直是机器视觉在工业仪表上应用的难题。
在具体操作中首先对表盘刻度区域进行定位,通常指针式仪表圆心处于指针转轴位置,刻度区域在仪表内呈环形分布。因此在自动识别技术中可以应用同心圆原理对仪表刻度区域进行定位,将圆心位置,起始刻度位置,量程以及单位进行确定。在获取精确仪表图像后再提取指针仪表内刻度区域信息数据。在确定仪表圆心位置时可以应用霍夫检测方法。对指针仪表外侧边缘与仪表刻度观察构成为同心圆,根据仪表实际构造的特征在仪表内构成同心圆截取出刻度区域,由于环形区域不方便机器视觉读取数据,因此需要二极化处理仪表凸显。二极化处理图像是将仪表图像的所有像素转化为黑色与白色两种,首先需要选取适合阀值,确保二级化处理后可以将图像细节特征准确反应,图像数据信息完整。在二极化处理环形区域后如果无法继续读取数据还需要变换仪表刻度区域,将图像及坐标转换后需要对信息进行提取,由于工业仪表种类较多,为了提高识别效率可以采用模板匹配法进行识别,需要提前将仪表刻度收集数据库内,为有效提高识别效率质量。提取仪表指针是识别工业仪表的重要部分,由于指针式仪表的指针呈线型,相较于其他仪表更容易识别,在实际中可以采用霍夫直线检测算法精确定位仪表指针,细化仪表指针时采用最小二乘算法将仪表角度准确获得。在识别指针式仪表过程中分为仪表刻度获得与仪表指针角度两方面,将两者组合可以得出指针仪表数据。
2 数显仪表读数识别
在工业生产中仪表分为数显式与指针式两种,部分数显仪表可以向监控系统传输测量数据,但是仍然有部分数显式仪表不具有数据传输功能,只能将当前测量结果显示。在数显式仪表上没有传输接口,获取识别数据仍然像指针式仪表一样采用人工采集,将数据收集记录并进行分析,因此数显式仪表读数识别也是工业生产自动化中的重要任务。数显式仪表读数识别首先需要提取仪表盘内数值,在确定数字位置时采用水平方向投影法与垂直方向投影法,由于数字仪表字符较为简单,对数字采取字符分割。对分割后的数字字符进行归一化,为后续识别字符做好基础。
2.1 数字字符分割
数显式仪表相较于指针式仪表同样存在影响读数精度的因素,因此巡检机器人将数显式仪表图像获取后,直接进行噪声滤波与图像暗光增强等图像预处理,为后续数据读取提供便利。巡检机器人在数显式仪表图像获取中难免会出现倾斜与扭曲情况,同样需要对仪表图像进行矫正,将数显式仪表的图像噪声去除,亮度与相关区域增强。通常数显式仪表数字显示区域为矩形,在矩形区域内包含数字字符,区域四边与仪表边框平行,根据数显式仪表结构直接确定数显区域,为后续数字分割做好基础。对数显示仪表图像预处理后直接进行数字字符分割,首先二值化处理图像,将已表示数提取出来形成二值化图像使图像,更加清晰明确,提高字符分割准确率。
数显式仪表图像预处理后,可以直接进行仪表数字提取。一般情况下水平方向投影法与竖直方向投影法是应用较多的提取方法。主要原理是对图像进行二值化处理,将原本图像转变为数字为黑色,背景为白色的图像处理。将黑色部分作为数字识别目标,然后对处理后的图像在水平方向与竖直方向进行投影,在得到投影曲线后定位与分割数字字符。在得到图像竖直投影后,对数值投影曲线按照从左到右的顺序逐步检测,其中检测出0转变为非0的突变量,将其作为左边字符边界,逐步向右侧开始检测,在右侧检测到某个数值转变为0的突变量时,将其作为右边首个字符的边界,将整个过程作为检测一个字符的全过程,对其他数字字符按照同样工作环节依次检测,直到检测所有字符的寬度和坐标。水平方向投影曲线检测原理同样,将数字字符的高度和纵向位置得出,综合分析水平坐标大小与竖直坐标大小,将仪表各个数字字符的大小与位置准确得出,截取字符。
2.2 数字字符识别
数字字符识别是数显仪表识别重要构成部分,常见的数字字符识别方法有穿针引线法,三线扫描法,模板匹配法,神经网络算法等。其中穿针引线法作为较为简单的方法,但是对二值化图像的精度要求较高,并且要求字符分割水平较高。三线扫描法对数字字符识别需要在数字字符取三条平行线,根据数字字符与三条平行线之间的交叉情况对数字字符进行识别,但是三线扫描方法只能应用于部分数显仪表中,适用性较差。模板匹配法是指提前制作相关数显仪表的字符模板,根据数字字符与模板之间的相似程度对数字字符进行识别,虽然识别效率较高,但是需要前期进行大量准备,制作所有仪表的数字字符模板,当仪表图像处理效果较差时,模板匹配法效率与质量较低,抗干扰性能较差。神经网络算法作为新型识别方法,对数字字符要求较低,没有特定要求,但是识别速度较快,准确度较高。
字符归一化是数字字符识别的基础,对数字字符分割后,首先需要将每个字符分别提取出来进行归一化处理,如果没有进行归一化处理直接进行识别,会导致神经网络算法识别中所有输入量为正值,导致权值矩阵产生变化,严重影响神经网络算法识别速度,因此为了避免出现识别错误的情况,对识别数字字符全部进行归一化处理,可以显著提高数字字符识别的准确率与效率。
3 结束语
随着人工智能技术与机器视觉技术的不断发展,在工业生产中的深度应用带来诸多便利。由智能巡检机器人代替传统固定监控设备是未来发展趋势,在减少成本投入的同时提高数据收集效率和质量,大大减少工作人员压力。针对工业仪表中指针式仪表与数显式仪表提出具体技术,为促进工业仪表识别技术发展贡献一份力量。
参考文献
[1] 张莹.数字化油田建设中自动化仪表的使用与维护研究[J].中国设备工程,2021(13):34-35.
猜你喜欢
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年28期)2016-12-21
科技视界(2016年26期)2016-12-17
科教导刊(2016年25期)2016-11-15
软件工程(2016年8期)2016-10-25
科技视界(2016年20期)2016-09-29
科技视界(2016年6期)2016-07-12
科技视界(2016年15期)2016-06-30
科技视界(2016年16期)2016-06-29
企业导报(2016年10期)2016-06-04
