
基于FPGA的传声器阵列成像系统设计
2021-12-07 13:21何睿胡定玉于淼李晓龙
智能计算机与应用 2021年7期
何睿 胡定玉 于淼 李晓龙

摘 要: 声源可视化技术对传声器数量和采集系统的性能具有一定的要求,传统驻极体传声器阵列采集系统存在功耗高、体积大、采集系统可移植性差和拓展性差等问题。本文设计了36阵元数字MEMS传声器阵列成像系统,有效克服了以上问题。采集模块选用FPGA为硬件平台,完成数据采集和信号处理模块设计,分析了I2S音频传输协议的实现、数据传输机制的建立和上位机数据的交互方式。并在普通室内环境中对此系统进行实验验证,系统的声源成像效果良好、成像分辨率高,在实际的噪声源定位与噪声设备监测中有广泛的应用前景。
关键词: 声源可视化; 波束形成; FPGA; MEMS声传感器
文章编号: 2095-2163(2021)07-0222-06中图分类号:TP212,TB52+5文献标志码: A
Design of microphone array imaging system based on FPGA
HE Rui1, HU Dingyu1,2, YU Miao3, LI Xiaolong3
(1 School of Urban Railway Transportation, Shanghai University of Engineering Science, Shanghai 201620, China; 2 Shanghai
Engineering Research Center of Vibration and Noise Control Technologies for Rail Transit, Shanghai University of Engineering
Science, Shanghai 201620, China; 3 China Railway Harbin Bureau Group Co., Ltd. Harbin EMU, Harbin 150000, China)
【Abstract】Sound source visualization techniques have some requirements on the number of microphones and the performance of the data acquisition system. Traditional electret microphone array data acquisition systems have problems such as high-power consumption, large size, poor portability and poor expandability of the data acquisition system. In this paper, a 36-array digital MEMS microphone array imaging system is designed to effectively overcome the above problems. The FPGA is selected as the hardware platform for the data acquisition module, and the data acquisition and signal processing modules are designed. The implementation of I2S audio transmission protocol, the establishment of data transmission mechanism and the interaction mode of the upper computer data are analyzed. The system has been experimentally verified in a common environment, and the system has good sound source imaging effect and high imaging resolution, which has a wide application prospect in practical noise source localization and noise equipment monitoring.
【Key words】sound source visualization; beamforming; FPGA; MEMS microphone
0 引 言
聲源成像可视化技术[1]利用传声器阵列采集多通道声压数据,通过信号处理算法,将声信号转换成图像信号使得空间声源分布可视化,可快速定位声源位置、分布情况以及瞬时动态变化特征,以用于设备状态评估和监测。目前,传声器阵列采集系统可分为2种类型。一种是由数据采集卡、标准总线和计算机构成,主要用于工业测试环境。其中,以美国国家仪器(NI)、泰克(Tektronix)、安捷伦(Agilent)为首的公司生产的仪器采集性能优越,工作状态稳定,但该类型采集仪器具有高功耗、大体积的缺点[2],且需要配合相应的数据采集卡使用,具有专一性强、可移植性差等局限性。另一种是由微处理器为采集核心的嵌入式采集系统构成,主要用于实验测试和部分工业测试。根据核心控制器类型不同,可选用单片机(MCU)、DSP(Digital Signal Processing)、ARM(Advanced RISC Machine)和FPGA(Field Programmable Gate Array)四种方式设计数据采集系统。其中,MCU一般为低速时钟,采集效率不高,难以实现多通道数据采集控制。DSP适合于数字信号处理,难以处理多通道数据同步采集逻辑控制[3]。ARM虽然功能比较丰富,但其运算资源有限,同时也不适合对时钟要求较高的场合。而基于FPGA的数据采集系统能并行处理和同步采集多通道信号,逻辑功能强大,接口丰富且使用灵活[4],便于大幅度拓展传声器采集通道数量,满足其声源成像可视化技术采集系统需求。
MEMS(Micro Electro-Mechanical Systems)技术是从半导体制造工艺中衍生出来的新型加工技术,将传感器、信号调理电路以及模数转换器集成封装[5]。自2006年Knowles Acoustics推出MEMS传声器以来,MEMS传声器逐渐取代传统驻极体传感器成为传声器阵列的默认选择,在噪声源定位[6]、运动车辆状态检测[7]、语音信号处理[8]和声学成像等场合广泛应用。Jelmer等人[9]利用数字MEMS传声器设计了一款52阵元圆形阵列,用于开阔地带噪声源定位,在25 m2消声室测试中,定位精度达到厘米级,而在模拟的10 000 m2开阔场地中,其定位精度可达到5个宽带声源。Izquierdo等人[10]指出声学成像系统设计取决于传声器数量的选择和处理算法的集成度。对于声学成像系统需要多通道信号采集的需求,该系统必须是模块化和可拓展性的,便于构建多维度阵列和增加阵列的孔径。研究中通过选取MyRIO作为硬件平台(带有FPGA和ARM处理器的嵌入式硬件),提出了一种可拓展的声学成像系统。通过研究生物识别领域的案例,验证了该系统的可行性。陈松林等人[11]以260个阵元设计的嵌套式数字MEMS传声器阵列成像系统,在普通车间环境下对机械噪声和气体泄漏噪声进行成像测试,其实验结果表明,该系统具有抗干扰性强,成像分辨率高的特点。
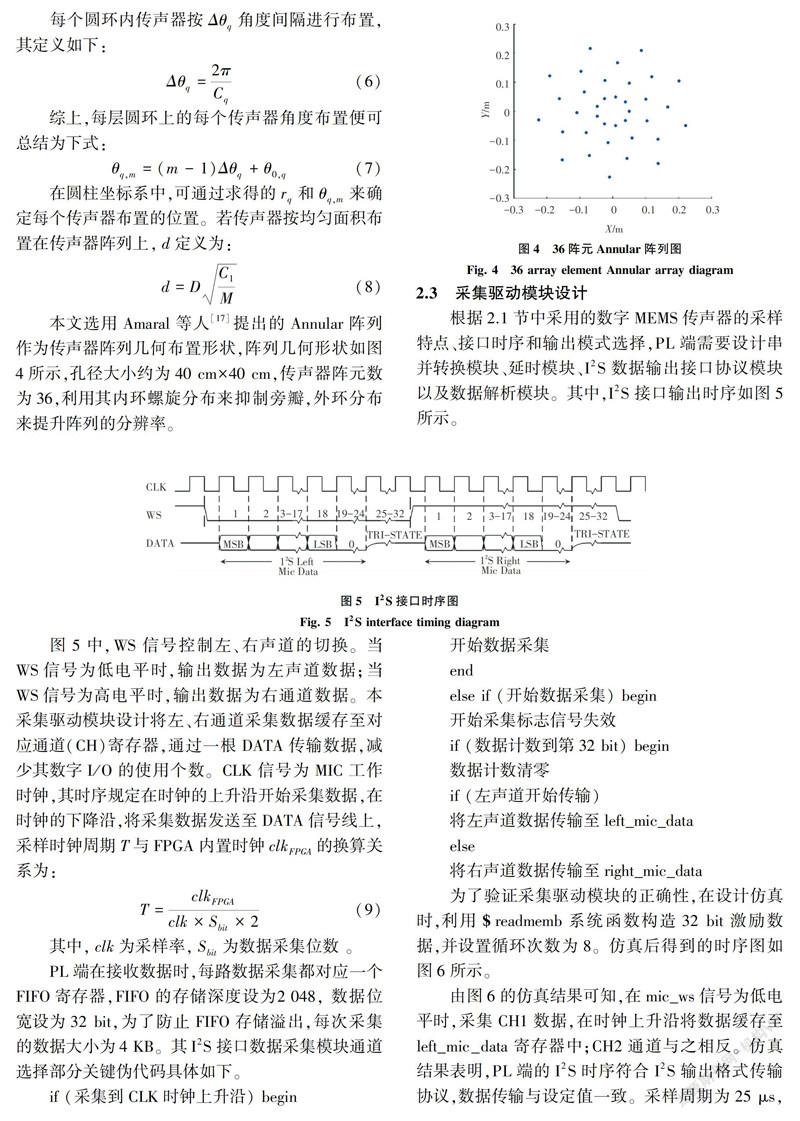
根据前述的系统开发探讨研究,本文选用数字式MEMS传声器设计传声器阵列采集系统,选用FPGA作为硬件采集平台,并设计了36阵元Annular阵列,可实现多路数据的同步采编存储。
1 系统总体架构
数字MEMS传声器阵列并行采集处理系统如图1所示。由图1可知,基于FPGA的传声器阵列成像系统由数字MEMS传声器阵列、Zynq-7000和上位机组成。其中,传声器选用Knowles型号为SPH0645LM4H-B的数字MEMS传声器,最高采样率可达到64 kHz,采样位数为24 bit,数据精度为18 bit。硬件系统处理核心选用的FPGA芯片型号为Zynq-7000,该芯片由可编程逻辑(Programmable Logic, PL)和双核ARM Cortex-9为核心构成的处理系统(Processing System, PS)组成。
数字MEMS传声器阵列并行采集系统流程参见图1。首先,声压信号通过MEMS传声器阵列采集,经过通用I/O管脚送入Zynq-7000的PL端。接下来,I2S传输协议将音频信号分成左右两个通道进行采集,I2S传输协议可控制2个MEMS传感器。本采集系统利用此传输特性,将其设为一组,分别将数据在一级FIFO中进行缓存。然后,通过设定数据轮询机制,将各一级缓存FIFO中存储的数据通过串并转换缓存至二级FIFO中。PS端与PL端经AXI总线进行传输通信,选用AXI-HP (High Performance Ports)高速通信接口,带有FIFO缓冲来提供“批量”读写操作,以支持PL端和PS端中存储器单元的高速率通信。在ARM中的PS端通过BRAM控制器读取PL端缓存的数據。利用PL端的按键控制,实现采集的开始和数据的发送。最后,数据发送通过UART串口,将数据传输给上位机,以供波束形成等信号后处理算法进行分析。
2 系统模块设计
2.1 传声器选型
MEMS传声器根据信号输出类型可分为模拟型输出和数字型输出,模拟MEMS传声器是将声压信号转换为相应电压信号输出,数字MEMS传声器则是利用PDM(Pluse Density Modulation)和I2S传输协议输出数字信号。与传统驻极体式传声器相比,数字MEMS传声器频响一致性好,其内部使用的Sigma-Delta ADC 采用1 bit变换技术,克服了采用多比特模数转换时带来的线性误差、纠错困难等缺点,可以提供更好的信噪比、抗射频和抗电磁干扰能力[12]。此外,在性能方面,MEMS传声器采样分辨率高,对环境温度变化具有良好的鲁棒性,频率响应平坦,且同批次的MEMS传声器具有良好的相位一致性。数字MEMS传声器的关键参数如下[13]:
(1)等效输入噪声(EIN),其值要在最小声压级和最大声压级之间,以适应测量范围。
(2)声学过载点(AOP)或满量程(max SPL),需满足动态范围大于100 dB的要求。
(3)平坦频率响应段,需选取灵敏度变化范围在3 dB内的频率段。
SPH0645LM4H-B MEMS传声器如图2所示,本文选择Knowles公司的SPH0645LM4H-B传声器,其具体性能参数见表1。
2.2 传声器几何阵列设计
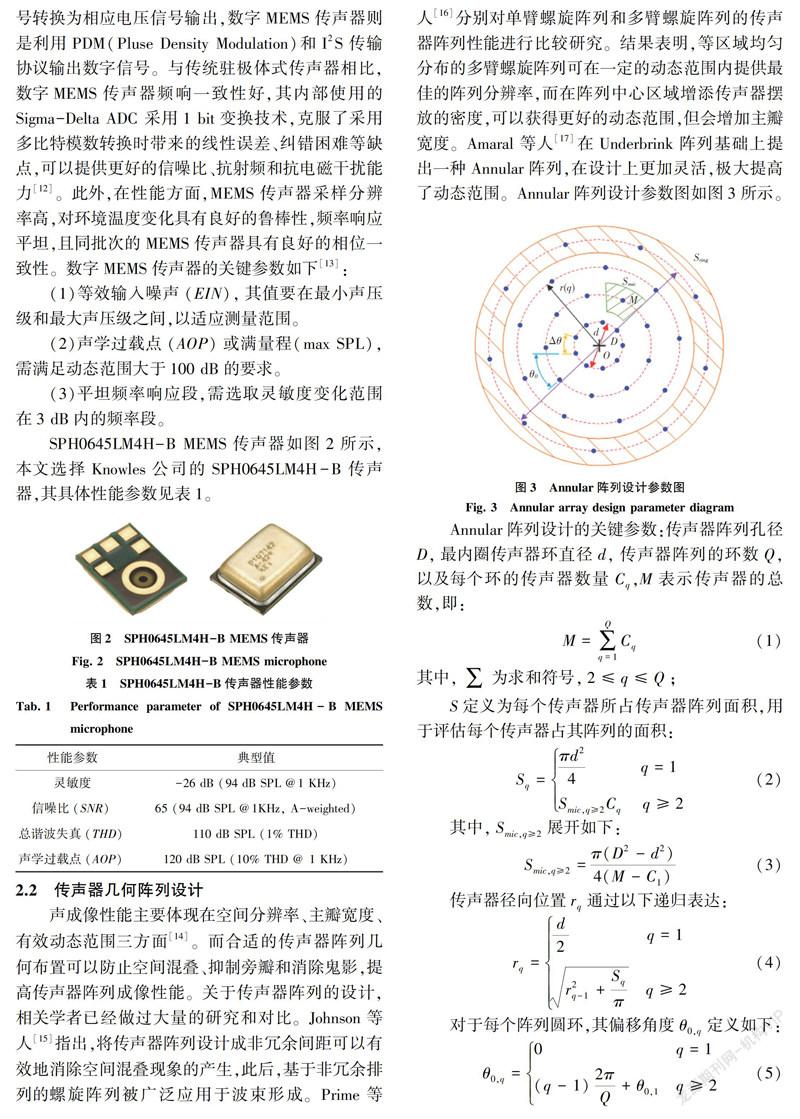
声成像性能主要体现在空间分辨率、主瓣宽度、有效动态范围三方面[14]。而合适的传声器阵列几何布置可以防止空间混叠、抑制旁瓣和消除鬼影,提高传声器阵列成像性能。关于传声器阵列的设计,相关学者已经做过大量的研究和对比。Johnson等人[15]指出,将传声器阵列设计成非冗余间距可以有效地消除空间混叠现象的产生,此后,基于非冗余排列的螺旋阵列被广泛应用于波束形成。Prime等人[16]分别对单臂螺旋阵列和多臂螺旋阵列的传声器阵列性能进行比较研究。结果表明,等区域均匀分布的多臂螺旋阵列可在一定的动态范围内提供最佳的阵列分辨率,而在阵列中心区域增添传声器摆放的密度,可以获得更好的动态范围,但会增加主瓣宽度。Amaral等人[17]在Underbrink阵列基础上提出一种Annular阵列,在设计上更加灵活,极大提高了动态范围。Annular阵列设计参数图如图3所示。
Annular阵列设计的关键参数:传声器阵列孔径D,最内圈传声器环直径d,传声器阵列的环数Q,以及每个环的传声器数量Cq,M表示传声器的总数,即:
2.3 采集驱动模块设计
根据2.1节中采用的数字MEMS传声器的采样特点、接口时序和输出模式选择,PL端需要设计串并转换模块、延时模块、I2S数据输出接口协议模块以及数据解析模块。其中,I2S接口输出时序如图5所示。
图5中,WS信号控制左、右声道的切换。当WS信号为低电平时,输出数据为左声道数据;当WS信号为高电平时,输出数据为右通道数据。本采集驱动模块设计将左、右通道采集数据缓存至对应通道(CH)寄存器,通过一根DATA传输数据,减少其数字I/O的使用个数。CLK信号为MIC工作时钟,其时序规定在时钟的上升沿开始采集数据,在时钟的下降沿,将采集数据发送至DATA信号线上,采样时钟周期T与FPGA内置时钟clkFPGA的换算关系为:
其中,clk为采样率,Sbit为数据采集位数 。
PL端在接收数据时,每路数据采集都对应一个FIFO寄存器,FIFO的存储深度设为2 048, 数据位宽设为32 bit,为了防止FIFO存储溢出,每次采集的数据大小为4 KB。其I2S接口数据采集模块通道选择部分关键伪代码具体如下。
为了验证采集驱动模块的正确性,在设计仿真时,利用[WT5HZ]$readmemb系统函数构造32 bit激励数据,并设置循环次数为8。仿真后得到的时序图如图6所示。
由图6的仿真结果可知,在mic_ws信号为低电平时,采集CH1数据,在时钟上升沿将数据缓存至left_mic_data寄存器中;CH2通道与之相反。仿真结果表明,PL端的I2S时序符合I2S输出格式传输协议,数据传输与设定值一致。采样周期为25 μs,满足其设定的40 k采样率,并且能按设计的数据存储大小依次按通道存储数据。此外,为了满足采集有效控制的需求,在PL端增添了简易人机交互功能,即通过按键和LED来控制采集的进行和完成。其中,分别设置采集进行LED1和采集完成LED2,当采集进行时,LED1会以500 ms的频率闪烁,表示采集正在进行;当采集完成时,LED2点亮,表明采集完成。
2.4 传输机制模块设计
为实现36通道数据与PS端DDR存储数据之间无失真的交互,本文传输机制模块设计了一套Ping-Pang数据轮询交互机制。通过Ping-Pang操作,可以完成多通道数据并行无缝缓存和处理。传输机制流程图如图7所示。
具体过程为:根据I2S数据传输协议特性,一组I2S数据传输分别控制2个通道MEMS传声器采集,设为一组(GROUP),共记18组。每一组都对应设置一个独立的FIFO缓存空间,各通道每次固定向FIFO缓存器发送4 KB数据量,通过有限状态机,控制各通道数据依次有序传输至DDR_FIFO缓存器中,完成Ping-Pang切换。DDR_FIFO是带有AXI接口的自定义模块,可将PL端采集到的数据通过AXI4高速总线,传输至PS端。AXI驱动模块设置了PL端DDR_FIFO中数据向PS端DDR中数据传输协议。首先设置数据传输的首地址为0x10000000,将DDR_FIFO中每传输4 KB数据打包成一个BLOCK块,每个BLOCK块对应一组MEMS传声器数据,通过上述数据轮询机制,可实现多通道数据依次传输至DDR中。
本文利用36个FIFO块来缓存PL端数据,缓解PS端的处理压力。若采用单缓存块,频繁的读写操作会导致PS端轮询标志位检测频率激增,并且读写处理需要固定周期执行,易使系统整体处理速度下降。而采用多组FIFO块缓存的方式,利用存储资源换取存储速率,可提高系统整体的处理速度。
3 实验验证
为了验证本文设计采集系统的正确性以及数字MEMS传声器的声源成像效果,在室内普通环境进行实际测试。实验现场布置图如图8(a) 所示,以阵列中心为原点,图中所标注的(X,Y,Z) 建立坐标系。2个扬声器由三脚架支撑,垂直高度为1.15 m(传声器阵列高度与其一致),间距为1 m,距离传声器2 m。声源1坐标 (-0.5,0,2) m、声源2坐标(0.5,0,2) m,2个扬声器同时播放高斯白噪声。
设置采样率为40 kHz,采样时长为0.1 s,采用传统频域波束形成算法,选取3.8~3.9 kHz频率段进行成像。成像效果如图8(b) 所示,利用本文所设计的FPGA成像系统可以准确分辨出2个扬声器位置,声成像图与声源实际分布一致,验证了所设计成像系统的正确性。同时,成像主瓣较窄,有效抑制旁瓣,验证了所设计传声器阵列的优异性能。
4 结束语
本文设计的基于FPGA传声器阵列的成像系统,采用了数字MEMS传声器研制的36阵元Annular阵列。其中,数字MEMS传声器,体积小,功耗低,具有较好的相位一致性;36阵元Annular阵列,具有较好的成像分辨率,有效抑制旁瓣、衰减鬼影,防止混叠。此外,本文以FPGA为硬件系统核心,实现了多通道数据同步采集和数据完整编存。与传统的采用驻极体式传声器阵列采集系统相比,实现了数据采集系统的小型化,具有低功耗以及低成本的优势。总结可得到如下结论:
(1)数字MEMS传声器,体积小,功耗低,具有较好的相位一致性,不需要设计额外的外围电路,极大降低了硬件系统板上资源。在多通道同步采集中具有优势,有利于声学可视化技术的应用推广。
(2)FPGA作為硬性系统核心,其灵活的逻辑设计、可控制多通道数据同时采集和丰富的I/O引脚便于通道数量拓展。其低功耗、体积小以及鲁棒性好的特点也为后信号处理算法的嵌入式设计提供稳定的前端。
(3)所研制的36阵元Annular阵列,具有较好的成像分辨率,有效抑制旁瓣、衰减鬼影,防止混叠。可适用于普通室内环境,具有良好的抗噪性能,成像效果稳定,在实际工程环境中具有良好的应用前景。
参考文献
[1]褚志刚,杨洋,倪计民,等. 波束形成声源识别技术研究进展[J]. 声学技术,2013,32(5):430-435.
[2]SHIMON R, ASAY B, DASCHER D, et al.InP IC technology powers agilent's infiniium 90000 X-Series Real time oscilloscope[C]//Compound Semiconductor Integrated Circuit Symposium.Monterey, CA, USA :IEEE, 2010:1-4.
[3]ZDEMIR A T, ATCI A. A TMS320C6416 DSP-based high-speed data acquisition system[C]// 2015 23nd Signal Processing and Communications Applications Conference (SIU) .Malatya, Turkey :IEEE, 2015:1-4.
[4]BAOShuang, YAN Hairong, CHI Qingping, et al. FPGA-based reconfigurable data acquisition system for industrial sensors[J]. IEEE Transactions on Industrial Informatics, 2017,13(4):1503-1512.
[5]SILVA B D, BRAEKEN A, TOUHAFI A. FPGA-based architectures for acousticbeamforming with microphone arrays: Trends, challenges and research opportunities[J]. Computers, 2018, 7(3):41.
[6]ZHANG Xin, SONG Enliang, HUANG Jingchang, et al. Acoustic source localization via subspace based method using small aperture MEMS arrays[J]. Journal of Sensors, 2014(11):1-14.
[7]ZHANG Xin, HUANG Jingchang, SONG Enliang, et al. Design of small MEMS microphone array systems for direction finding of outdoors moving vehicles[J]. Sensors, 2014, 14(3):4384-4398.
[8]HAFIZOVIC I, NILSEN C C, Kj[WT6BZ]φ[WT6B1]LERBAKKEN M, et al. Design and implementation of a MEMS microphone array system for real-time speech acquisition[J]. Applied Acoustics, 2012, 73(2):132-143.
[9]JELMER T, DOMINGUEZ F, SILVA B D, et al.SoundCompass: A distributed MEMS microphone array-based sensor for sound source localization[J]. Sensors (Basel, Switzerland), 2014, 14(2):1918-1949.
[10]IZQUIERDO A, VILLACORTA J, LARA D, et al. Design and evaluation of a scalable and reconfigurable multi-platform system for acoustic imaging[J]. Sensors, 2016, 16(10):1671.
[11]陳林松,曹跃云,郭文勇,等. 基于数字式MEMS传感器的声阵列成像系统设计[J]. 应用声学,2015,34(5):439-444.
[12]CHRISTEN T. A 15-bit 140-[WT6BZ]μ[WT6B1]W scalable-bandwidth inverter-based [WT6BZ]ΔΣ[WT6B1]modulator for a MEMS microphone with digital output[J]. IEEE Journal of Solid State Circuits, 2013, 48(7):1605-1614.
[13]PFLUG P. Aspects of the use of MEMS microphones in phased array systems[C]// INTER-NOISE and NOISE-CON Congress and Conference Proceedings,.HongKong, China:the Hong Kong Institute of Acoustics and the Hong Kong Polytechnic University, 2017:5093-5103.
[14]褚志刚,杨洋,蒋忠翰. 波束形成传声器阵列性能研究[J]. 传感技术学报,2011,24(5):665-670.
[15]JOHNSON D H, DUDGEON D E. Array signal processing: Concepts and techniques[M].New York, NY,United States:Simon & Schuster, Inc., 1992.
[16]PRIME Z, DOOLAN C. A comparison of popularbeamforming arrays[C]//Proceedings of Acoustics 2013 Victor Harbor: Science Technology and Amenity, Annual Conference of the Australian Acoustical Society .Victor Harbor, Australia:Australian Acoustical Society, 2013:1-7.
[17]AMARAL D, CARLOS S, DE M. Design of microphone phased arrays for acoustic beamforming[J]. Journal of the Brazilian Society of Mechanical Sciences & Engineering, 2018, 40(7):354.
基金项目: 国家自然科学基金(51605274); 上海市地方院校能力建设项目(20030501000)。
作者简介: 何 睿(1998-),男,硕士研究生,主要研究方向:声学成像、FPGA系统开发; 胡定玉(1987-) ,男,博士,副教授,主要研究方向:声阵列信号处理、轨道车辆故障诊断技术。
通讯作者: 胡定玉 Email:dyhu1987@sues.com
收稿日期: 2021-04-16
