基于STM32和OV2640的模拟电磁曲射炮设计
2021-12-07 09:35吴必瑞
洛阳师范学院学报 2021年11期
吴必瑞,韩 梁
(宁德师范学院 信息与机电工程学院,福建 宁德 352100)
传统火炮通过弹药爆炸时产生瞬时推力将炮弹发射出去,而电磁炮利用电磁推力将弹丸发射出去,这利用了电能转换为动能的原理. 相比较而言,电磁炮具有操作方便、 性能优良和可控性好等优点[1-2]. 线圈型电磁炮的炮管由线圈绕制而成,其可利用超级电容充电放电的瞬间产生的洛伦兹力将铁弹丸弹射出去,并可通过单片机进行目标检测和控制,以实现炮弹发射[3-4]. 本文采用的电磁炮的制作原理简单,其依据2019年全国大学生电子设计大赛赛题“模拟电磁曲射炮”要求的参数内容进行设计,可以实现键瞄准和射击目标等功能,对加深对电磁炮的认识具有一定的教学意义[5-6].
1 方案的设计与论证
1.1 控制器
系统选择ST意法半导体的STM32F103ZET6作为主控芯片. 此芯片采用ARM的Cortex-M3内核,频率为72MHz,反应速度快,且有100多个GPIO,完全可以满足系统控制的要求.
1.2 位置检测模块
该模块采用数字摄像头传感器OV2640,其外观如图1所示,该传感器具有结构简单、 工作电压较低、 体积小、 功耗低、 操作简单、 易于控制等特点,通过单片机对SCCB总线控制,可读取选取整帧、 子采样等方式不同的8位数据.
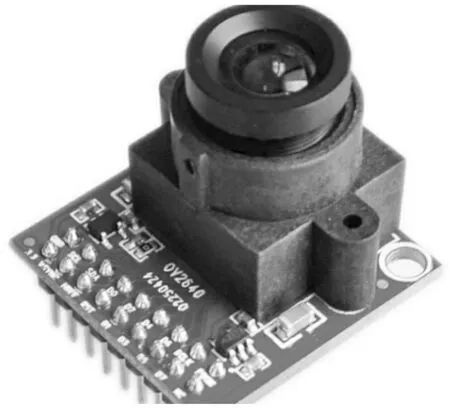
图1 数字摄像头传感器OV2640
1.3 运动控制模块
舵机是常用的伺服电机系统之一,它集成了电机、 传感器和控制器部件,同时具有价格低廉、 结构紧凑、 易于转角控制、 输出扭矩较大、 响应速度快等优点. 本系统采用由两台舵机构成的云台系统,以实现曲射炮发射的角度和方向调整.
1.4 角度测量
由于加速度传感器在静止放置时受到重力作用,因此会有重力加速度. 利用这个性质,系统采用MMA7260芯片作为重力加速度传感器. 系统通过测量重力加速度在传感器在x轴和y轴上的分量,可以精确计算出在垂直平面上的倾斜角度.
2 系统理论分析与计算
2.1 电磁炮参数计算
铁质炮弹的受力分析如下:假设固定线圈的匝数为N,线圈的电流为i,x轴方向为炮弹运动方向,则线圈中磁场强度如公式(1)所示:

(1)
公式中:μ0为真空磁导率;μr为铁磁性物质的磁导率. 磁通密度B与磁通量Φ的大小分别如公式(2)和公式(3)所示.
(2)
Φ=μ0HA
(3)
其中,A表示磁路横截面积,铁磁材料炮弹受力F如公式(4)所示.
(4)
其中,dΦ/dx为磁通随位移的变化率.
从上可知,增加线圈匝数、 增大线圈的电流以及增大炮弹与线圈的耦合,可以增大铁磁材料炮弹的受力,从而使得弹射速度更快.
2.2 弹道和能量计算分析
本设计的电磁炮内弹道为长16 cm、 直径为12 mm的圆柱形管道,其可以给弹丸足够的初速度. 炮弹在水平和垂直方向的加速度的关系如公式(5)所示:
(5)
弹道采用电容为储能元件,其储存的能量公式如公式(6)所示:
(6)
笔者选取直径6 mm、 质量0.893 g的弹丸,电容容量为2 000 μF.
3 电路与程序设计
控制系统主要包括对靶标识别和弹丸运动的控制. 系统主要由控制模块、 位置检测模块、 舵机执行机构、 TFT屏显示以及人机交互键盘模块组成,系统总体框图如图2所示.
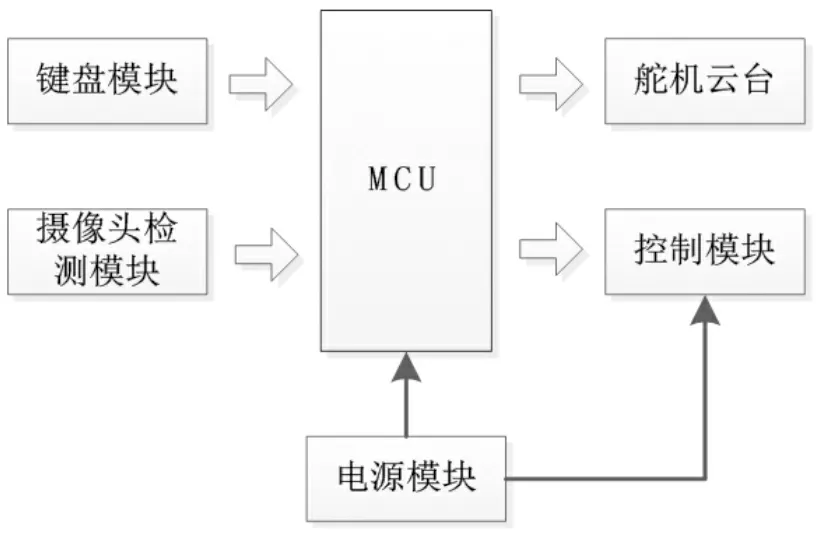
图2 系统总体框图
3.1 电磁炮电源模块的设计
电源采用12 V稳压电源,通过电机驱动模块DRV8833把直流稳压电源变成±12 V电源,之后通过变压器升压后的可达到160 V. 系统的电磁炮线圈电压电路实物如图3所示,电源模块框图如图4所示.
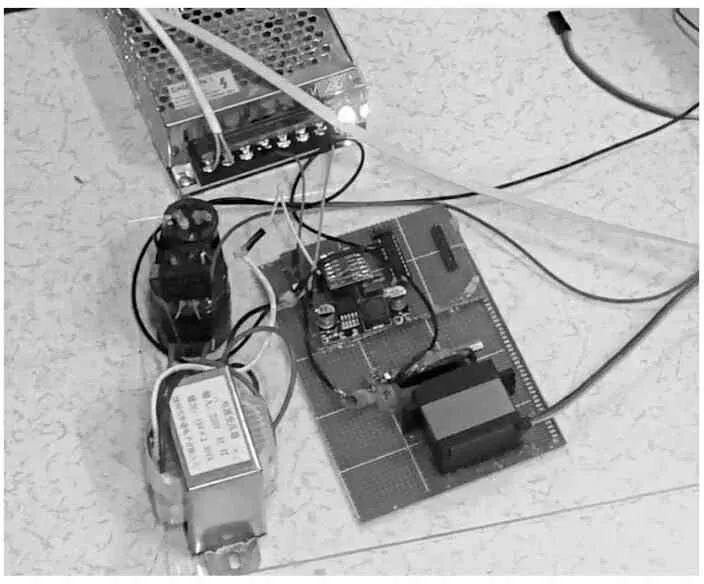
图3 电磁炮线圈电压电路实物图

图4 电磁炮电源模块框图
3.2 系统控制程序设计
软件部分主要由键盘设置、 TFT屏显示、 舵机控制和摄像头采集数据等功能模块子程序构成. 键盘设置模块实现坐标设定、 灰度设定、 模式选择等功能. TFT屏显示模块实现摄像头图像、 跟踪光圈、 运动时间、 坐标和识别颜色阈值等相关信息的显示,方便用于系统的调试. 舵机控制模块是根据设计不同的模式进行控制,使用按键进行模式选择. 在获得距离的情况下,通过MCU控制输出不同占空比的PWM,以控制舵机云台自动调整仰角大小,系统主程序流程图如图5所示.
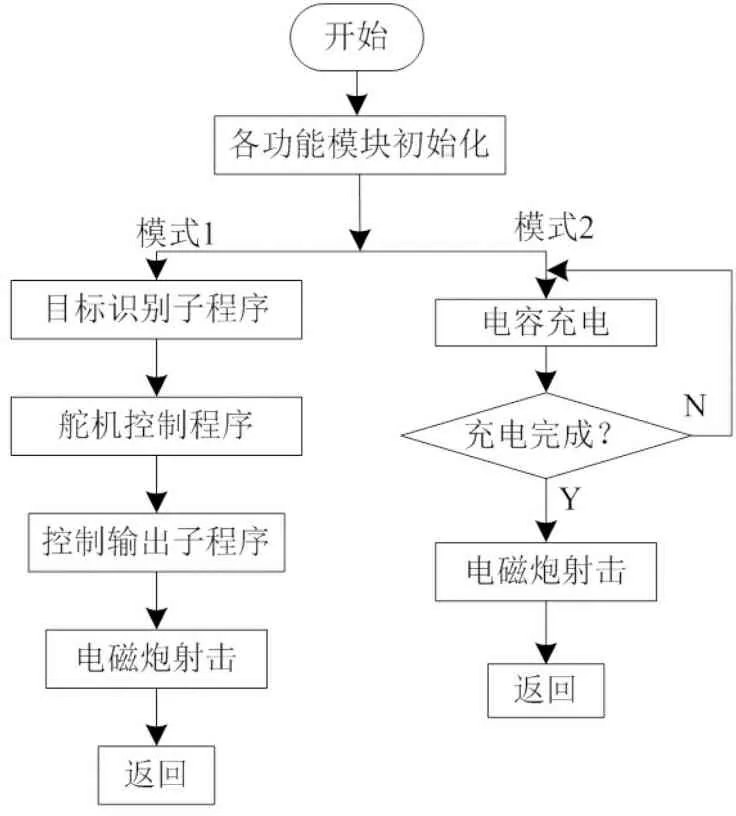
图5 主程序流程图
摄像头采集模块采用摄像头OV2640识别红色标靶,程序判断识别到目标时,做好发射弹丸准备. 目标识别子程序流程图如图6所示.
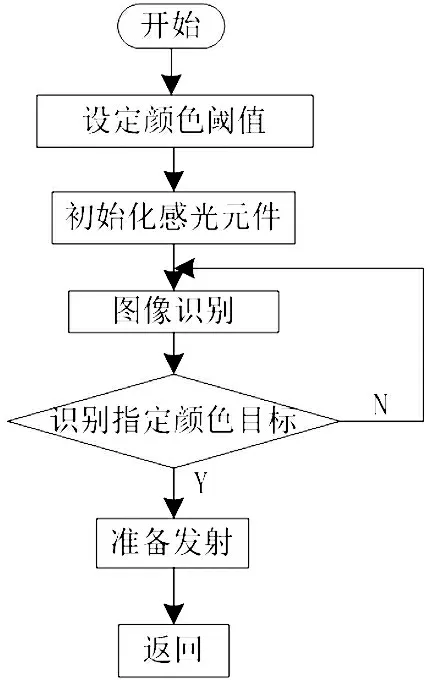
图6 目标识别子程序流程图
4 测试方案与测试结果
4.1 系统调试
首先只让一个舵机转动,观察到其可以控制平板运动; 接着让两个舵机一起转动,观察到平板可以灵活运动. 然后给MCU上电,先测试摄像头显示情况,显示屏可以清晰显示面板并锁定红色目标硬件软件联调. 之后把红色靶标分别放在距离电磁炮云台2米、 2.5米和3米的位置,摄像头自动识别靶标位置,按下开关发射弹丸,弹丸可以落在指定位置. 最后检查摄像头安置与面板可以满足显示屏显示定位的要求,硬件电路无虚焊,电池电量充足,面板没有出现扰乱程序对红色靶标的识别的颜色.
4.2 测试结果及分析
在指定范围内任意位置放置环形靶,启动后,系统自动搜寻环形靶的测试结果. 环形靶放置在靶心距离定标点200 cm~300 cm间,且在中心轴线上的位置处,键盘输入距离d值,电磁炮将弹丸发射至该位置,距离偏差的测试结果如表1所示.
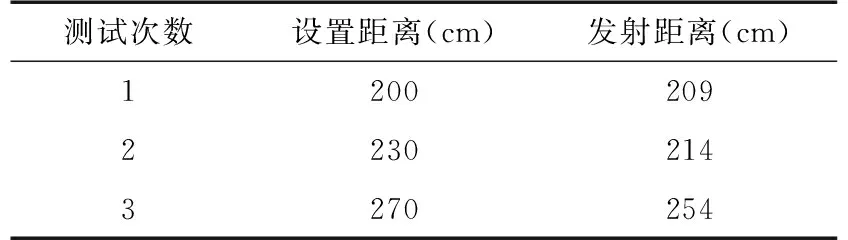
表1 距离偏差的测试结果
用键盘给电磁炮输入环形靶中心与定标点的距离d及与中心轴线的偏离角度,启动后,电磁炮自动瞄准射击,按击中环形靶环数的测试结果如表2所示.
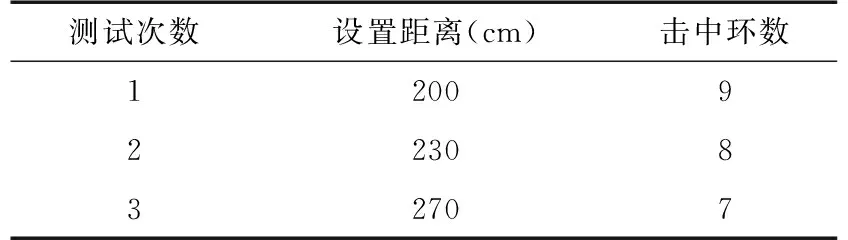
表2 击中环形靶环数的测试结果
5 结论
电磁曲射炮的工作原理是弹丸在磁场中受到安培力的作用而高速弹出. 文中所设计的电磁曲射炮具有结构简单、 性价比高、 易于实现等优点. 根据测试数据,系统可以较好满足设计要求,下一步的工作是在电容两端的电压,炮管上线圈绕制匝数,炮管仰角,弹丸材质,弹丸在炮管中放置位置等方面进行优化.
猜你喜欢
商品与质量(2021年43期)2022-01-18
小学生必读(中年级版)(2021年12期)2021-12-02
兵器装备工程学报(2020年3期)2020-04-22
兵器装备工程学报(2019年4期)2019-05-05
电子制作(2018年12期)2018-08-01
环球时报(2018-06-19)2018-06-19
消费导刊(2018年8期)2018-05-25
电子制作(2018年1期)2018-04-04
弹箭与制导学报(2018年5期)2018-02-21
航空模型(2016年5期)2016-07-25