PD40附壁自爬升式桥梁钢塔安装起重机
2021-12-03 10:52周罡
起重运输机械 2021年22期
周 罡
武桥重工集团股份有限公司技术中心 武汉 430056
0 引言
我国桥梁高塔安装施工多采用塔式起重机节段吊装方案。当塔高偏高、单塔节质量过大时,仍采用塔式起重机进行吊装施工会使设备制造和租赁成本非常高。目前,国内塔式起重机额定起重量能达到200 t以上的非常少,设备制造和租赁费用都非常高,能同时满足起重量大、幅度大的塔式起重机更是屈指可数。基于此,一种满足钢塔节段吊装的附壁自爬升式起重机正好满足了这种需求。PD40附壁自爬升式桥梁钢塔安装起重机(见图1)不仅很好地满足了施工需要,并可大大节省起重设备成本,也为同类爬塔起重机的研发提供有力技术支撑。

图1 PD40附壁自爬升式起重机
1 PD40附壁自爬升式起重机主要功能及性能参数
PD40附壁自爬升式桥梁钢塔安装起重机通过布置在主塔顺桥向塔身的2排轨道,借助步履式顶升系统来实现起重机沿塔身升降功能。在吊装钢塔节段时,主梁前端支腿与塔节段锚固联接,起重机顶部起升机构通过步履顶推系统滑移到主梁悬臂端取梁区,在高塔横桥向外侧取梁。起升机构将塔节段提升到安装高度后,纵移退回到钢塔安装区范围内,通过起升机构的纵、横移操作,配合钢塔自身导向定位装置,精确调整钢塔节段安装位,进行塔节段的安装定位施工。
该起重机的主要性能参数为:额定起重量40 t,起重机速度(空载/满载)5/2.5 m/min,自爬升速度1.5 m/min,最大起升高度100 m,设备自重95 t,装机功率81.5 kW。
2 PD40附壁自爬升式起重机主要结构及特点
如图2所示,PD40附壁自爬升式钢塔安装起重机主要由轨道系统、爬架、主梁、起升机构、前支腿、液压系统、电气系统等组成;金属结构的主材采用Q345B;起重机爬架通过顶升座与轨道系统连接,爬架顶部和主梁尾部之间通过2根销轴、2组法兰连接;主梁上2根主纵梁上设置顶推轨道。起升机构2支腿横梁置于主纵梁轨道面,在液压缸作用下沿纵梁方向移动。主纵梁底部设置前支腿,前支腿在电动推杆作用下可沿主纵梁方向移动。
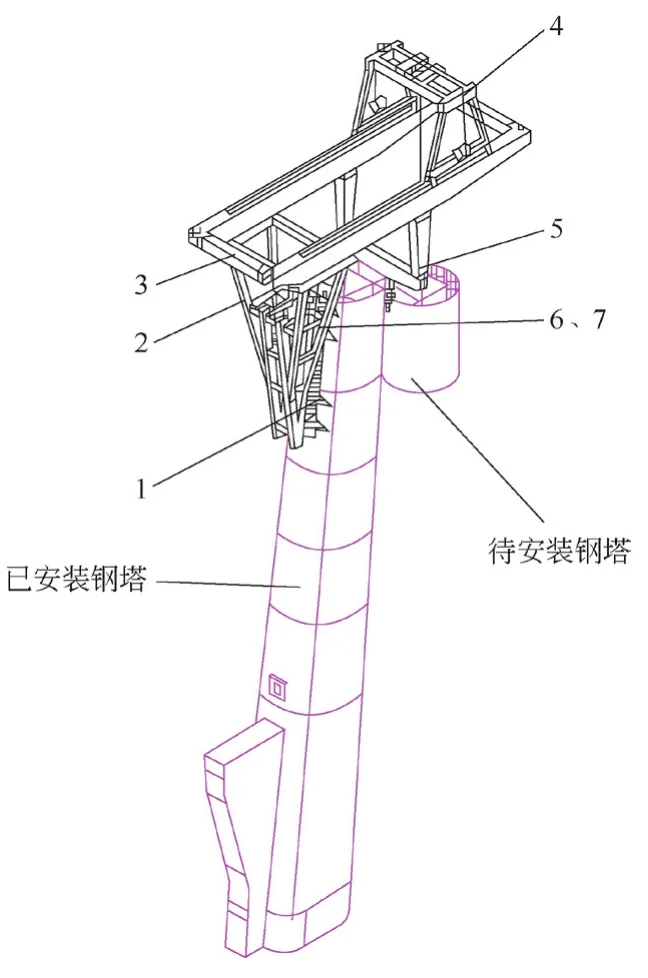
图2 PD40附壁自爬升式起重机总装示意图
2.1 轨道系统
如图3所示,轨道系统由2排3 m×3 m标准轨道、爬架顶升座、液压缸座、导向座、顶升液压缸等组成。2排3 m×3 m标准轨道间距为1.5 m,与塔壁上的锚固座通过高强螺栓连接。锚固座端面上开设剪力孔,轨道底部设置剪力块,传递剪力。爬架与爬架顶升座之间通过高强螺栓连接,爬架端面上设置剪力孔,顶升座端面设置剪力轴,传递剪力。液压缸座、爬架顶升座与标准轨道之间通过插拔销连接。爬架上升时,液压缸座与轨道之间插拔销将液压缸座锁定,顶升座与轨道之间插拔销退出,顶升液压缸在油压作业下推动顶升座上升从而带动起重机上移。顶升液压缸活塞杆伸出1个全行程后,顶升座与轨道之间插拔销插入,将顶升座锁定,液压缸座与轨道之间插拔销退出,顶升液压缸在油压作业下拉动顶升座上移。此后,往复上述动作,推动起重机步履上移。
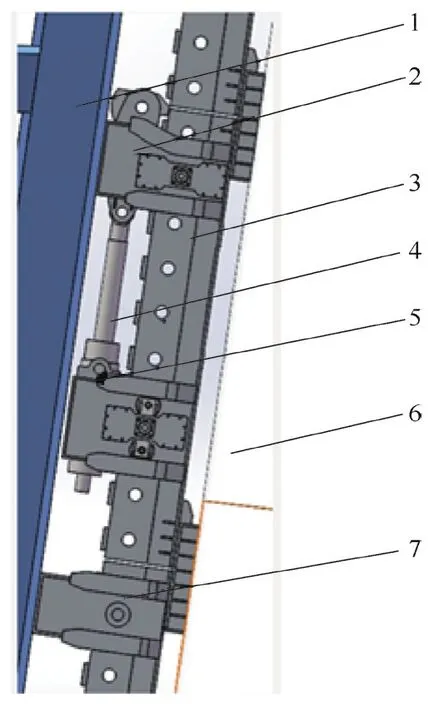
图3 轨道系统三维示意图
2.2 爬架和前支腿
爬架是起重机爬升工况的主要传力结构件,前支腿则是钢塔节段吊装工况的主要承力结构件。爬架上设有上下通道和多层工作平台,便于液压缸座、爬架顶升座的维护。
爬架上方设有2处耳轴座和2处法兰座,用于和主梁的连接。这种设计的原因在于钢塔中部有一段钢混过渡段,此区域有一段曲率变化区间,吊装钢塔节段时需提前松开2处法兰座螺栓,通过操作前支腿液压缸将此处法兰间的垫块抽出,待主梁姿态调整至水平状态后螺栓恢复。
前支腿通过反钩机构倒挂在主梁底部,在电动推杆作用下可沿主纵梁前后移动。前支腿横梁两侧底部各设置带机械锁的支顶液压缸,并通过4根销轴与钢塔塔壁之间锚固座连接。当钢塔节段吊装时,前支腿液压缸可方便地与锚固座销接;当起重机爬升时,支腿液压缸也可方便地与锚固座脱开。
2.3 主梁和起升机构
主梁为箱形梁结构,结构刚度较大。主纵梁尾部分别通过销轴、法兰与爬架连接,主纵梁顶部设有起升机构滑移轨道。起升机构为典型的门式起重机机构,与传统轨道式门式起重机不同,起升机构大车行走为液压缸步履式。起升机构底部设置导向和反钩装置,可确保整机高空作业具有很高的安全稳定性。
3 关键技术
1)液压缸多点同步顶升
起重机上共设置了4组顶升液压缸,每支液压缸上均内置自带4~20 mA模拟量输出的位移传感器。PLC可根据液压缸上每支位移传感器信号,采用PID算法,通过对电液比例换向阀供油量的控制,对各液压缸的绝对位移进行实时调整,并对4支液压缸之间的相对位移进行闭环控制,从而实现一个600 mm行程内0.2 mm的精度控制。
2)轨道系统插拔销高精度自动对孔
实现高精度自动对销功能的关键要在于:轨道自身的机加工精度、销孔的加工精度和销孔群的位置精度必须得到保证;轨道在钢塔上的安装精度必须得到保证,安装轨道时应首先将轨道与锚固座连接,并通过临时匹配件加固,最后整体定位轨道;在爬升过程中,液压缸座和爬架顶升座存在力的体系转换,故插拔销进出时都必须处于卸力状态。
3)爬升过程的安全保障
起重机上所有4组液压缸座和4组爬架顶升座均设置液压缸驱动的插拔销。PLC通过设置的行程开关识别每个插拔销是否全伸或全缩,该开关信号受控于PLC,并作为爬升动作的与门信号,从而确保整机安全。
4)吊重超限控制
起升机构支腿横梁和前支腿上均设置拉线式位移传感器,卷扬机构上设置称重传感器。PLC根据上述位置和荷载信号获取荷载的实际力矩信息,并与整机吊重工况下的Ansys理论计算模型库文件数据进行比较,从而实现力矩超载限动控制。
4 结束语
PD40附壁自爬升式钢塔安装起重机在福安栖云大桥的成功应用,填补了国内同类钢塔安装施工法的空白,相关关键技术的成功应用也给同类起重机的研发提供了有力的技术支撑。
猜你喜欢
现代制造技术与装备(2022年1期)2022-02-21
煤气与热力(2021年6期)2021-07-28
汽车实用技术(2021年4期)2021-03-05
中国科技纵横(2020年5期)2020-06-29
发明与创新·大科技(2020年1期)2020-04-17
模具制造(2019年3期)2019-06-06
汽车实用技术(2017年3期)2017-03-03
智能制造(2016年11期)2017-01-03
汽车实用技术(2016年11期)2016-12-08
山东工业技术(2016年18期)2016-12-01