输电线路巡检智能单兵装备全景采集系统设计
2021-12-02 13:26郭蔚波
科学与生活 2021年25期
郭蔚波

摘要:电力巡检作为保障电力线路安全的最基本措施[1],通常由巡视员到现场巡视,并以纸张或笔记本的形式记录电力线路情况。这种方法不仅效率低下,而且信息采集的全面性较差,受环境影响较大,存在许多盲区,难以获取全景信息[2]。为提升电网巡检效率和质量,众多专家学者对电力巡检系统展開研究与设计,其中,曹峰梅等[3]设计了折反射全景系统,利用折射成像系统分析双曲面反射的镜面参数实现全景采集,受空间角度和图像分辨率影响,该系统采集信息不够全面,且图像处理运算难度较高;陈国胜等[4]设计了智能红外全景识别系统,依据低功耗原理,利用BIRD网络形式完成全景信息采集,受时差性影响,其区域感知性能较低。
关键词:输电线路;智能巡检
面对此类情况,单人背包式信息采集的方式应运而生,利用摄像机采集电路画面传输到后台,在降低人工采集信息错误率的同时,也弥补了车载信息采集方式的区域片面性,且危险系数较低。对此,本文设计输电线路巡检中的单人背包式全景采集系统,为提升电路安全提供有力保障。
1 单人背包式全景采集系统
1.1 系统整体结构
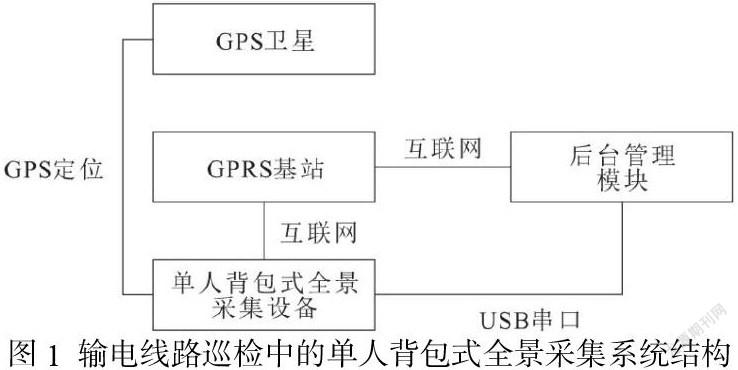
输电线路巡检中的单人背包式全景采集系统主要由后台管理模块和单人背包式全景采集设备组成,二者间以USB串口方式连接,GPS卫星定位单人背包式全景采集设备,GPRS基站利用互联网连接采集设备和后台管理系统,实现了从输电线路巡检云服务到终端巡检的实施过程。输电线路巡检中的单人背包式全景采集系统结构如图1所示。
图1中,单人背包式全景采集设备负责巡视任务的接收、监督、导航,以及采集、传输全景数据等[5],后台管理模块负责线路查询、系统维护和全景图像拼接等。
1.2 单人背包式全景采集设备
1.2.1 设备组成
单人背包式全景采集设备结构如图2所示。图2中,中央控制模块作为全景采集设备的核心,主要负责采集定位数据,以蓝牙方式接收数码相机拍摄的图像,与MCU和后台管理模块相连接,实现电力巡检相关任务。MCU模块负责监控图像采集模块,图像采集模块的信息通过UART接口方式传输到MCU模块,经过协议解析后,使图像采集模块完成拍摄任务,并以LED的形式展示[6-7]。RFID模块负责物资管理,以标签的形式标记物料,由于金属和非金属材料的混合情况,本文采用超高频标签来提高射频的穿透性,实现物资管理功能。整个系统的供电和电源输出则由电池模块负责。
1.2.2 图像信息采集
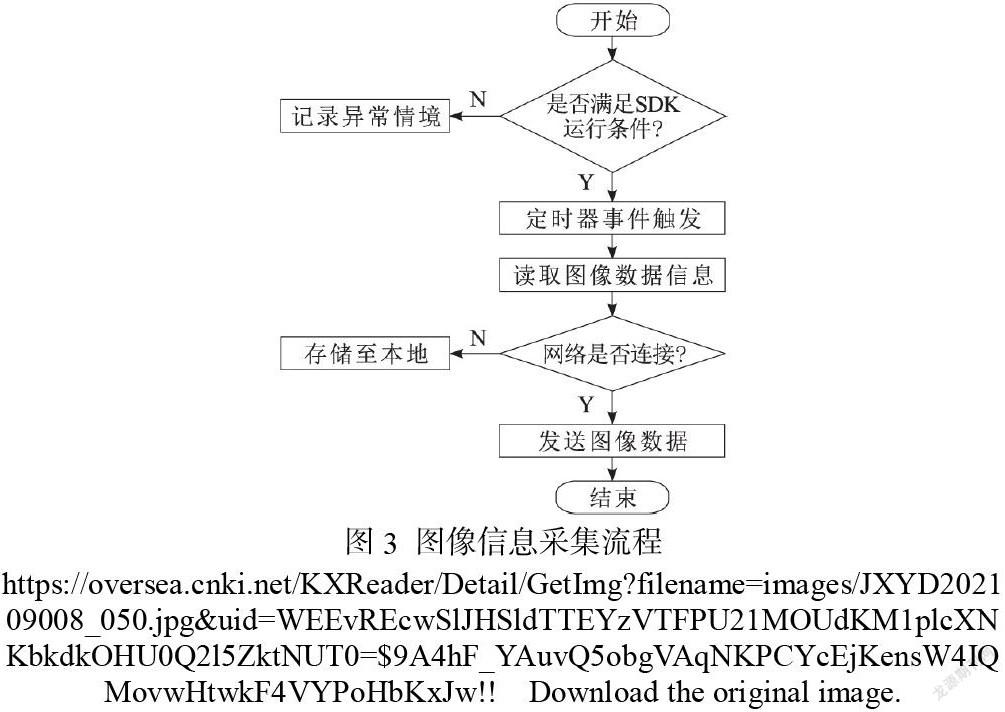
巡检图像数据以第三方SDK库访问方式传输到单人背包式全景采集系统的后台管理模块内,在不同GPRS基站之间建立长连接,获取基站服务器指令;在相同的HTTP之间建立短连接,发送位置信息、巡检图像等,后台模块依据该信息实现巡检管理,当网络出现异常时,通过建立本地数据库的方式及时备份巡检相关数据信息。系统图像信息采集流程如图3所示。
1.3 全景图像拼接
1.3.1 图像拼接流程
图像拼接是系统实现全景图像采集的关键技术,在系统的后台管理模块中实现。全景图像拼接可以将有边界的图像拼接成全景图像,而图像拼接最重要的是图像特征提取。提取的图像经过最近邻匹配、特征点估计和参数变化后形成全景图像。
1.3.2 基于SIFT图像特征提取
作为一种局部特征提取方法,SIFT算法在图像处理方面有很强的优越性,应用范围非常广泛[8]。SIFT算法的核心是距离空间理论,其图像特征提取步骤如下所述。
a.定义二维高斯函数,公式为
利用式(1)推导范围空间表达式为
上述公式中,范围空间因子、图像在某特定点的像素值、具有范围变换的高斯函数与图像的卷积分别由σ、|(x,y)、L(x,y,σ)表示。
b.范围空间极值检测。
该算法利用高斯差分离器的 DoG算子,在距离空间上检测稳定关键点,其计算公式为
剩余DoG算子的范围空间由式(3)获得,该公式是由图像高斯金字塔的每个范围内相邻金字塔的范围之差获得的。
为了得到极值点,比较每个采样点的中点,分别在该层空间、上层空间和下层空间中取每个采样点的最大值和最小值,然后在这个范围内取每个采样点的极值点,即要选择的特征点。
由于每组图像的第1层和最后1层都无法进行极值比较处理[9-10],为了提高空间变化的连续性,采用了高斯模糊法,将每组图像的第1层和最后1层分成2组图像,从而保证极值计算的全面性。
c.筛除不合格关键点。
通过差分处理确定各极值点的位置和范围,选取低对比度、不稳定极值点及边缘响应点,进行差值处理[11],则DoG函数在范围空间的Taylor展开公式为
M表示样本像素点,其计算公式为
假设Μ^表示偏移量,求导式(4),控制偏移量的同时筛除掉对比度较低的极值点,即使其导数为0,可得其计算公式为
为了剔除不稳定的边缘响应点,对使用2×2矩阵N求导[12],其主曲率计算公式为
假设α、β均表示特征值,矩阵N特征值和D的主曲率成比例,且α>β,则
当α=γβ时,则
检测的主曲率通过式(10)获取。通过判断某个特定阈值 γ是否高于主曲率,完成极值点剔除流程。
d.关键点方向分配。
为保证特征描述向量在方向上拥有保持不变的特性[13],利用图像的局部特征获取各个点的方向,假设m(x,y)、θ(x,y)分别表示梯度和方向,则梯度和方向的计算公式为
其中,关键点的范围空间值由Q(x,y)表示。
在筛除不合格关键点过程中,由于梯度直方图角度为360°,在实际计算中按照45°角1个柱,合计8个柱,并在以关键点为中心的相邻窗口内采样计算。当图像特征检索完成后,每个特征点均具有范围、位置和方向3个信息[14]。
e.关键点描述子生成。
为保证图像特征的旋转不变性,使图像特征坐标与关键点的方向一致,以关键点为中心,用4×4小窗计算8个方向的直方图,得到每个梯度的积累值,得到8×8的窗口[15],并生成特征特征子描述,从而形成种子点。采用4×4的小窗口,以种子点为128维 SIFT特征向量,对图像进行特征提取,并对最近邻匹配、特征点估计和参数变化进行全景图处理,以提高图像匹配的鲁棒性。
2 结束语
本文结合单人背包式信息采集方式,设计输电线路巡检中的单人背包式全景采集系统,利用摄像设备采集输电线路图像,基于SIFT图像特征,提取输电线路巡检过程的全景图像。实验结果表明:本文系统采集图像角度广,可有效降低电路巡检任务难度;随着分辨率的增加,采集图像帧频较高,图像采集能力强;系统工作频率、图像处理耗时等均较高,具有较强稳定性。
参考文献
[1]殷大发.煤矿井下全景影像采集系统设计[J].工矿自动化,2018,44(8):6-9.
[2]李显杰,冯大伟,向阳.折衍混合环带式全景光学系统设计[J].激光与光电子学进展,2019,56(18):232-237.
[3]曹峰梅,牟勇,白廷柱.基于仿视网膜成像器件的折反射全景系统设计[J].光学技术,2018,44(2):133-139.
猜你喜欢
环球时报(2022-05-18)2022-05-18
工业设计(2022年1期)2022-02-09
数学学习与研究(2020年16期)2020-12-28
语数外学习·高中版中旬(2020年5期)2020-09-10
考试与评价·高二版(2020年6期)2020-09-10
语数外学习·高中版中旬(2020年10期)2020-09-10
环球时报(2020-09-01)2020-09-01
睿士(2020年6期)2020-08-18
数码影像时代(2018年1期)2018-09-25
特别文摘(2016年21期)2016-12-05