关于激光雷达在轨道交通站台门安全防护中的应用
2021-12-02 08:19舒骆鹏
科学技术创新 2021年32期
舒骆鹏
(金华市金义东轨道交通有限公司,浙江 金华 321000)
由于站台门在设计安装时须满足限界的要求,因此站台门与车体之间存在一定的间隙,而由于线路、信号道岔设置等原因引起的限界加宽则导致该间隙进一步加大,在列车门和站台门关闭后形成了一个不安全的封闭空间。极端情况下乘客会被夹在站台门与列车车体之间,存在安全事故隐患。近年来各种物理及电气措施也都在不断研发,激光雷达作为一种新型防夹检测系统,已被应用在轨道交通项目中,并且实践证明运行效果良好。
1 站台门防夹系统发展现状分析
1.1 物理防护措施的发展
早期轨道交通站台呈直线状,在一些车站的端部有20 到30 毫米的加宽量,采取的安全防护措施主要有防夹挡板、车尾灯带、防护横撑、防站人斜板等,但由于物理措施或多或少都有一定的弊端,在安全防护系数上并不高[1]。但对于一些全曲线站台或限界加宽量较大的站台,由于车体与站台门之间的间隙进一步加大,以上的各项物理防夹措施将降低,甚至丧失防护效果。
1.2 电气探测防护措施
目前轨道交通安装的电气探测措施有激光对射和红外探测两种。激光对射原理是依靠激光发射,接收器接收信号。站台门关闭之后,激光对射装置会开启工作状态,若有障碍物阻断光束的路径则会发出报警。红外探测装置主要通过牺牲探测距离提高探测精准度,但是在工程应用过程中,红外探测有覆盖区域狭窄的弊端,且安装精度要求更高。同时,受列车振动,轨行区灰尘、铁屑或高架站其他光源等因素干扰,也会影响检测效果,造成误报。
2 激光雷达间隙智能探测系统设计方案
2.1 激光雷达的具体工作原理
激光雷达技术应用的是时间飞行(TOF)工作原理,即激光发射器(TX)发射很短的光脉冲,光脉冲被物体反射回后,接收器(RX)收到反射回来的光束。由于传感器和物体之间有一定的距离,反射回来的光线会有延迟,处理器会计算延迟时间。根据光的传播速度30 万千米/秒,处理器会把延迟时间转换成相应的距离。如图1 所示。例如,光速30 万千米/秒,延迟时间是13 纳秒,距离是2 米。

图1 激光时间飞行技术原理图
2.2 激光雷达间隙智能探测系统的参数指标
激光雷达探测系统主要使用固态激光雷达进行扫描,扫描过程具有分辨率高,抗干扰能力强的优势,深度精度保持在2.5cm 左右,水平垂直分辨率会持续控制在0.2° ,直线探测距离可达200m[2]。由于激光传感器内的旋转反射镜会把光束反射成不同的角度,使得激光传感器能够扫描一个预先设置的平面。反射镜的每个面能保证传感器扫描96° 的区域,当反射镜是立方体时,同一区域内反射镜每旋转一圈可以重复扫描4次。激光雷达会对轨道站台门与列车车门之间的空间进行全覆盖检测,由于检测距离远,位置信息能够实现精准探测,且获取的数据可靠性更高。如图2 所示。
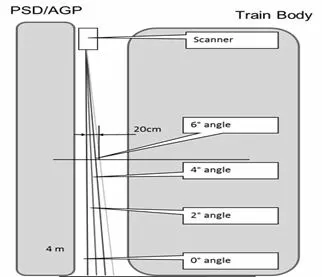
图2 激光雷达装置的四层扫瞄检测效果图
2.3 激光雷达的有效探测范围
在实际应用中,可采用每道滑动门安装一套雷达装置或整侧站台安装一套激光雷达装置。这两种方式均能准确对位于某个滑动门的障碍物进行定位。考虑到建设成本及日常系统维护,在轨道交通项目中由于站台总体有效长度均在200m 以内。因此,对于直线站台,一侧站台可作为一个探测区域,安装一套雷达装置即可。若站台为全曲线站台或端部加宽量较大,可根据工程实际情况合理划分探测区域。
2.4 激光雷达间隙智能探测的工作流程
当列车进入站台后,激光雷达检测装置即进入工作状态,在站台门开启前,通过探测主机获取车体与站台门之间的初始状态信息。当乘客上下车完毕,站台门关闭后,激光雷达检测装置对车体与站台门之间的情况进行再次扫描探测。若没有检测出障碍物,则装置发出安全信号,并重新进入待机状态;若检测出障碍物或检测出乘客滞留,则进行报警,见图3。

图3 激光雷达间隙智能探测的工作流程
2.5 激光雷达主要系统构成
激光雷达工作框架主要由间隙探测主机,车站管理服务器和激光雷达三个元件构成。间隙探测主机一般安装在车头位置,在具体工作过程中会有声光报警以及系统旁路操作等功能。车站管理服务器是整个间隙探测系统的控制中心,通常会安装在站台门设备室,直接负责雷达的关停,障碍物的报警以及数据的存储和处理。激光雷达接入门控器端子排内,主要负责障碍物的检测,主要通过对激光脉冲反馈的分析,确定障碍物的位置[3],见图4。

图4 激光雷达主要系统构成
3 激光雷达在轨道交通站台门安全防护中的具体应用
3.1 激光雷达在轨道交通站台门处的安装位置
目前轨道交通车站型式主要分为地下站和高架站,而根据车站的型式,站台门对应分为全高站台门和半高站台门。广州地铁8 号线北延段华林寺、滘心、陈家祠等站在每道单元滑门设置了一套激光传感器。激光雷达安装在站台门的下方,激光雷达安装处会凸出站台门顶箱后封板5 厘米,光口向上倾斜,与车体滑动门之间有一定的距离,这样可以最大程度发挥安全防护的作用。当站台门、列车门关闭时,触发系统功能,如果此时系统探测到车体和站台门门间传感器检测区域内存在障碍物时,则自动报警[4]。如图5 所示。

图5 激光传感器安装效果图
3.2 通讯带宽的有效选择
激光雷达装置在具体运行过程中会受到雷达收集的数据和控制主机之间的数据交换的影响,须合理选取数据的传输方式。例如一些城市轨道交通线路的车体采用8 个编组,每节车厢一共有5 个车门,最终安装了40 台激光雷达,运行过程中检测雷达装置传输速度为每秒通信量1339200b,设计人员此时就要选择160M 以上的通讯带宽,这样才能有效满足激光雷达工作时的需求,并且也能有效提高轨道交通整个系统的安全性。
3.3 服务器系统的有效选择
传统的间隙探测措施准确性和稳定性较低,后期需要投入大量的人力和物力进行校准和维护保养工作。安装激光雷达系统可以在某种程度上降低人力物力的投资。在具体运行过程中,激光雷达采集数据通过传输到存储系统,并且对所有数据进行分类和整合,且多数激光雷达系统本身自带服务器,可以对所有数据展开分析,这样可以有效提高运算的效率。此外,激光雷达需要稳定的运行环境,在选取服务器系统时,最好用双机热备方法进行数据备份,这样一来,若主机出现异常,备份系统可以继续工作,并且可通过报警系统通知维修人员。
3.4 设计方案的明确
激光雷达系统在安装之前要严格对现场进行勘测,设计出可行性较高的方案,这样才能确保雷达系统运转正常。目前国家也在大力发展市域轨道交通项目,市域轨道交通线路以轻轨为主,而轻轨主要通过高架的形式构建,安装激光雷达时需要根据施工特点设计有效的方案。可考虑在站台门边框上钻孔攻丝,将雷达固定在门的左下方,电缆敷设可以采用线槽设计,这样可以保证激光雷达探测系统在高架站应用的可实施性。
3.5 采用动态边界防护算法
在激光雷达安设过程中要采用动态边界防护算法,保证轨行区的振动对雷达造成的影响最小。可以将站台门的延伸部位设置为防护A 区,延伸部位和车身之间设置为动态防护B 区,A区进行设备安装,然后对数据进行收集传输至数据内部,B 区则主要对列车停止后的数据进行测量,当列车完成一周期的运行之后,数据清零,如此反复。A 区域和B 区域要在同一扫描周期内完成数据的收集,这样可以对列车产生最大的保护作用。
综上所述,激光雷达扫描装置的技术原理稳定可靠,并且已经在城市轨道交通项目中试点性实际应用,使用效果良好。可以有效解决以往传统电气探测装置准确性低、误报率高、后期维护困难等问题,具有较为广阔的使用前景。当然在各地具体工程项目的实际应用中,由于各地的列车车型、线路及站台情况各不相同,项目各方应根据本项目的实际情况,因地制宜的研究具体实施方案。同时需经过实地检验和测试,且测试结果各项显示均达最优之后才能正式投入使用,这样才能最大程度保障轨道交通工程的运营安全。
猜你喜欢
农业工程学报(2022年4期)2022-04-24
小资CHIC!ELEGANCE(2022年2期)2022-01-11
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
航空发动机(2020年3期)2020-07-24
动漫界·幼教365(中班)(2020年3期)2020-04-20
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
延河(2017年7期)2017-07-19