
矿用巡检机器人能源动力技术研究
2021-12-01 06:35金建成
中国新技术新产品 2021年18期
金建成
(中国华能华亭煤业集团华亭煤矿,甘肃 华亭 744100)
0 引言
近年来,国家极力推进煤矿企业向“数字化、无人化”的方向发展,为响应国家政策,各地煤矿积极地开展井下“无人化”改造工作[1]。在煤炭生产过程中,具有运量大、运力强等一系列优点的皮带运输机是煤炭开采的关键运输设备,其一旦发生故障,会对生产以及人员产生极大威胁,因此,对皮带机巡检工作的无人化改造是改造工作中极为重要的一环[2]。目前,普遍采用的方法是由巡检机器人来完成无人化的巡检工作,尽管许多专业人员对巡检机器人的能源供给问题进行了深入研究,但其一直是困扰巡检技术发展的重大阻碍。
1 巡检机器人供电装置设计研究
巡检机器人的供电装置主要由充电插座、充电插头以及充电箱组成。其中,插头固定于轨道,通过电缆与充电箱连接,充电插座集成于机器人本体,可以随机器人进行移动。插座和插头均设计有遮尘机构,可以实现防尘、防水保护。防爆充电装置采用电气闭锁技术,当不充电或处于故障状态时,继电器打开,机器人无法接触到电压信号,触点严禁带电,以保障运行安全;当机器人接收到充电指令且机器人运行到预定充电位置后,继电器闭合,充电桩与机器人之间构成闭环回路即可正常充电。
初始状态:插座、插头各有一套隔爆阀执行机构,初始状态下隔爆阀处于关闭状态,形成隔爆腔;插头、插座的隔爆阀腔体中各有4个接线柱,初始状态下,接线柱均不带电。
充电状态:当执行充电命令后,机器人本体带着插座向插头移动,通过导向杆、导向套导正后保证插座的前端与插头前端的圆形台阶对正插入,触发机械闭锁机构后,形成隔爆腔,满足圆筒隔爆要求;同时触发到位开关,延时5 s后,插座和插头的隔爆阀均开始动作,执行打开命令。当隔爆阀完全打开后,插头1的隔爆导柱向前移动,使插头和插座的4个接线柱接触,检测到位后,开始充电。
分离状态:当检测到蓄电池已经充满电后,插头和插座的4个接线柱断电,插头的隔爆导柱开始反向移动,远离插座。当检测隔爆导柱到达初始位置时,插头与插座的隔爆阀开始旋转关闭,形成隔爆腔。检测隔爆阀关闭到位后,卸扣执行机构动作,机械闭锁机构释放,插座与插头分离,同时插座遮尘罩机构和插头遮尘罩机构开始动作,插座遮尘罩和插头遮尘罩关闭,发挥防尘、防水的作用,充电动作结束。
机器人具备防爆充电功能后,就不需要在现场更换电池并拿到其他地点充电了,且充电闭锁设计完备,可以防止不安全操作,保障了充电的安全性。其结构紧凑、体积小、重量轻且电压输入范围宽,适用于电压波动大的情况,充电效率高,发热量小,不存在温升导致设备高温失效的问题,同时还有防爆设计,可以在易燃、易爆环境中使用。
2 巡检机器人供电系统设计
2.1 供电电池设计与实验
对煤矿巡检机器人供电电池的首要要求是电池的续航能力。而目前,我国煤矿巡检机器人大多采用铅酸蓄电池,铅酸蓄电池具有较多的弊端:使用寿命短、维护量大、充电时间长以及安全性能较低。而锂电池是一种使用新型环保材料的电池,具有体积小、重量轻、密度高、寿命长、耐温差大以及安全性能好等优点。2种电池性能对比见表1。
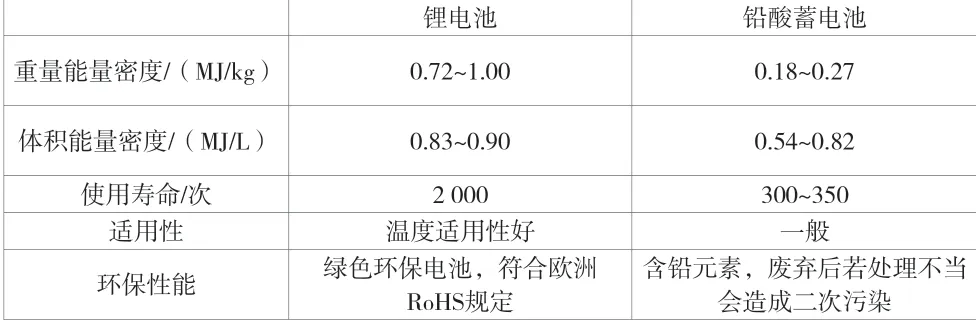
表1 锂电池与铅酸蓄电池性能对比
通过对比发现:在重量能量密度、体积能量密度以及使用寿命等方面,锂电池具有较大优势,约为铅酸蓄电池的2~3倍,这使锂电池更轻、更小;另外,锂电池充电速度较快,环保性能较好。
为保证巡检机器人在煤矿井下依然能够稳定、高效地工作,选用高性能的锂离子低温电池作为工作状态下的供电电源。低温锂电池是一种采用特殊材料及工艺制成的电池,其放电容量及工作性能表现优异。低温锂电池具有常规锂电池的安全性能和存储功能,可以有效提高电池的放电性能,降低电池内阻,达到高倍率放电的效果[3]。
在满足煤矿井下巡检机器人续航要求的前提下,设计了一种容量为23 Ah、电压为3.79 V的低温锂电池,其具体的单体性能参数见表2。

表2 低温锂电池单体性能参数
实验结果表明:电池在模拟环境以及无外部加热条件的情况下,以0.8 C放电,截至电压为2.5 V时,放电容量大于80%,同时初始最低电压大于3.2 V。两电池实验组均满足性能要求,其中,C02-008实验组表现更优。实验表明,所设计的锂电池符合《矿用锂离子蓄电池电源安全技术要求》的相关要求且满足煤矿巡检机器人的续航要求。
所研制的供电电源系统由28个锂电池单体电芯组成,另配有电池箱体、含模块化电气辅件以及1套电源管理系统。该电源系统的锂电池组整体性能参数见表3。

表3 锂电池组性能参数
所设计的电源系统整体电压为48V、容量为20Ah且其外壳防护达到了IP65级别。
2.2 电源管理系统设计
由于供电电源由28个锂电池单体电芯组合而成,因此,为使锂电池组能够稳定、安全地工作,必须为其设置1套可靠的电源管理系统。巡检机器人上设置有双目相机、激光避障传感器、温湿度传感器以及红外热成像仪等多种传感器,各传感器所要求的额定电压、额定电流各不相同,可靠的电源管理系统能够为各用电元器件分配准确的电压与电流,在延长各元器件寿命的同时也保证系统可以安全、高效地运行。
所设计的锂电池组电源管理系统能够实现以下功能:1)实时精准地采集并分析电源的充电电压信号、放电状态下的电压信号、电流信号以及电源温度。2)检测电池组的剩余电量。3)与上位机进行实时通信。4)电池保护。5)故障分析与报警[3]。
锂电池组电源管理系统的工作过程如下:电源系统控制开关接通后,电源管理系统上线,管理系统首先进行初始化自检,闭合电源系统动力输出回路;如果检测到电池组剩余电量不足,则信号与外部充电机电压信号进入充电模式,为巡检机器人充电,否则进入放电模式;实时采集电流、电压以及温度等信号,判断电池保护模块的启停,监测分析与故障报警;电源系统控制开关断开后,电源系统下线。其工作流程如图1所示。
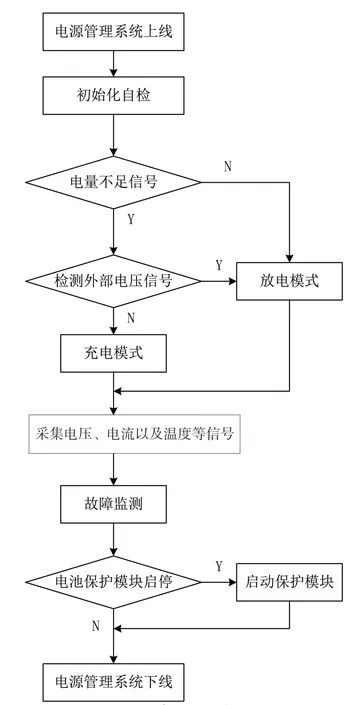
图1 电源管理系统工作流程图
该电池管理系统采用充、放异口方案,支持加热控制、外部开关控制以及485通信,具有过充保护、过放保护、过流保护以及温度保护等功能,满足自行走轨道式巡检机器人在矿下巡检应用项目中的使用需求。
3 巡检机器人充电系统设计
3.1 充电系统本体结构设计
为保证巡检机器人系统的高度无人化运行,该文还设计了分布式全自动充电站,以实现全自动充电的功能。正常情况下,机器人运行不需要人员参与,即可实现无人化巡检与值守。长距离巡检路径中设置有多个充电站,分布式充电站可自动为巡检机器人充电,当机器人剩余电量低于设定阈值时,机器人在控制系统的操控下,自主前往距离最近的充电站进行充电,电量充满后自动开始巡检作业,不需要额外的人为干预,极大地减少了人工充电的劳动强度[4]。
分布式充电站的核心装置为充电机构与充电箱体,采用接触式防打火充电技术,既安全又可靠。
充电机构可以在机器人接入时通过导电板为机器人充电,机器人则通过充电触头获取电能,将电能储存在锂电池组中。巡检机器人的充电过程如下:当机器人驶入机库的指定位置时,位于巡检机器人本体上的限位传感器检测到安装在机库侧壁上的到位检测板,限位传感器给上位机发送信号,上位机则下达“到达充电位置”控制命令,并控制机器人停车制动。巡检机器人根据自身电量判断是否需要充电,如果此时机器人剩余电量低于预设阈值,则会停留在充电站并等待充电器供电,否则驶离充电站;充电站控制系统检测到机器人停留时长达到预设“充电延时”的时长阈值后,便会给充电机构通电,并通过充电触头与机器人锂电池组建立充电回路,开始充电。
为了确保充电机构与巡检机器人充电触头的可靠接触,导电板被设计为滑触式,这是一种可升降弹性自适应的机械结构,主要包括导电板与弹性柱塞。在机器人到达充电位置时,导电板会被充电触头顶起,受弹性柱塞的作用,会对导电板施加一定的正压力,使导电板压紧充电触头,确保充电时导电装置的可靠接触。
此外,巡检机器人本体上设置有应急充电接口。当巡检机器人因特殊情况不能正常使用自动充电功能时,可以使用应急充电线将充电箱与机器人本体上的应急充电接口连接起来,手动为巡检机器人进行应急充电操作。避免了机器人在充电站因故障而发生卡死的现象。
3.2 充电辅热系统设计
充电辅热系统主要的作用是为锂电池提供合适的充电温度。在进行自动充电作业时,电池组的隔热保温设计与电池组内部配备的辅助加热模块相互配合,确保电池在充电之前达到充电所要求的温度范围,实现充电效率最大化的同时,保障充电的安全性。
电池组可以辅助加热系统电路。在某些特殊情况下,机器人自身的保温加热系统无法满足充电所要求的条件,为满足煤矿井下的使用需求,保证设备的可靠运行,在充电站增加外部加热设备,对电池进行加热保护。外部加热设备是在充电箱内设置硅胶加热片及温度传感器。在充电前先为机器人加热,满足充电温度条件后,再为机器人充电。温度传感器检测到充电箱内的温度低于设定的温度阈值时,控制系统便会给硅胶加热片通电加热,当温度传感器检测到温度适当时,控制系统便会自动断开加热电路,停止对硅胶加热片通电,从而控制温度。
4 充电机库设计与现场安装实验
4.1 机库设计与强度校核
为避免巡检机器人充电装置在煤矿井下受到渗水的影响,也为了避免机器人充电时因导电板淋水而导致供电箱漏电,在充电站及轨道的外侧设置有充电站机库。除上述作用外,机库也可在机器人待机检修时为机器人提供保护,为了便于检修操作,机库顶盖设计为可开合式,顶盖关闭时用弹簧卡进行锁紧,需要检修时可以快速开盖进行检修。
在充电站机库整体结构中,铰链与安装架作为主要受力部件,其设计合理度与强度极为重要。现对铰链进行校核计算。选用高负载铰链的负载力可达450 N,单侧配置数量为3个,总负载能力为1 350 N,顶盖重量约为300 N,所选铰链安全系数为4.5,强度满足要求。
为保证内部安装架的强度满足要求,安装架的材质选用合金钢材质。对安装架进行ANSYS静力学受力分析,建立几何模型,进行网格划分,添加约束与载荷,直观展示其受力规律。分析表明,在正常受力状态下,其产生的最大应力为87.26 MPa,而所选合金钢的屈服强度为620.42 MPa,远远大于最大应力,安全系数达到7.11,设计满足强度要求。
4.2 现场安装与实验
为保证实验结果的精确性,电源现场试验所使用的样机包括巡检机器人的所有系统,例如供电系统、驱动系统以及传感系统等。为模拟真实工况,实验选择的轨道具有小于25°的斜坡,水平大于1.5 m、垂直大于4 m的转向半径,行走速度调整为0.1 m/s~0.5 m/s自适应,双目相机、激光避障传感器、温湿度传感器以及红外热成像仪等多种传感器全部开机处于工作状态,实验环境温度0 ℃。
巡检机器人满载60 kg,所有用电元器件满负荷运行,在上述实验条件下,充电时间小于2 h,每次充电可不间断运行大于8 h,双机交替充电工作即可实现24 h不间断巡检,实现无人值守的巡检要求。
5 结语
该文所研制的应用于煤矿井下的矿用巡检机器人充电供电系统应用大容量、耐低温锂电池,保证了驱动系统和检测设备的稳定工作,该系统具有以下5个优点:1)供电充电系统具备低温适应能力,在煤矿井下能够维持系统正常工作状态。2)锂电池组电源管理系统具有自主判断充放电模式、监测故障与电池保护的功能。3)长距离巡检路径中分布的多个充电站使巡检机器人真正实现了24 h不间断巡检,达到了自动充电、无人值守的目的。4)充电辅热系统能够使机器人充电效率最大化,同时保障充电的安全性。5)IP65级别的防水机库为巡检机器人的安全充电提供了保护,同时也为机器人提供了快速检修的平台。
猜你喜欢
机电安全(2022年5期)2022-12-13
玩具世界(2022年1期)2022-06-05
环球时报(2020-12-08)2020-12-08
房地产导刊(2020年6期)2020-07-25
智慧少年(2018年10期)2018-12-24
电子制作(2016年15期)2017-01-15
中国质量监管(2016年10期)2016-07-10
学苑创造·A版(2016年1期)2016-03-10
建筑与预算(2014年4期)2014-11-18
建筑与预算(2014年7期)2014-10-14
