
基于自然观察数据的行人过街意图预测模型研究
2021-11-30 06:15:36施雯赵彬刘艳娟
大学·社会科学 2021年10期
施雯 赵彬 刘艳娟



摘 要:车载行人预警系统在提高车辆的行车安全和行人保护方面发挥了重要的积极作用,但较高的误报率导致该系统的接受度较低。为提高车载行人预警系统的准确率,本文利用激光雷达和高清摄像头对行人过街时行人和车辆的行驶数据进行了采集,并对行人过街时的行为特性进行了分析,根据分析结果建立了基于随机森林机器学习方法的行人过街意图预测模型,模型的准确率达96.43%。结果表明,该预测模型能够很好地对行人过街意图进行预测,对提高车载行人预警系统的准确率具有重要意义,有助于交通安全的提高。
关键词:行人预警系统;行人过街;机器学习;预测模型
中图分类号:TP18 文献标识码:A 文章编号:1673-7164(2021)37-0110-03
随着智能驾驶辅助系统的不断发展,车载行人预警系统对提高交通安全发挥了非常积极的影响[1-2]。但是该预警算法过于保守,误报率较高,导致驾驶员对该系统的接受度不高,提高车载行人预警系统的准确率是目前亟须解决的问题。
行人作为城市道路交通中的弱势群体,在发生交通事故时,往往会受到更为严重的伤害,据公安部2019年数据统计,仅在2019年,全国机动车与行人发生的事故数量就达53558起,占总交通事故数量的21.63%[3]。准确识别行人的过街意图,帮助驾驶员制订更加合理的驾驶策略,对行人事故的减少具有重要意义。
针对上述问题,本文选取了一段无信号灯的人行横道路段作为研究对象,利用激光雷达和高清摄像机对该路段行人—车辆的交互数据进行了采集,包括行人特征参数、行人过街数据以及与行人过街存在交通冲突的相关车辆的行驶数据等。基于所采集到的数据,本研究分析行人过街时的行为特征,并确定了与行人过街意图相关的的特征参数,基于分析结果建立了基于随机森林机器学习方法的行人过街意图预测模型,对路侧行人是否过街进行了准确判断。
一、试验数据采集
行人过街包括有信号灯有人行横道路段、无信号灯有人行横道路段和无信号灯无人行横道路段3种情况,由于有信号灯有人行横道路段行人的过街意图较为明显,故本文仅对后两种路段进行数据采集。
将激光雷达和摄像头安装在车上进行行人过街数据采集,存在实验周期长,需要大量的人力物力且实验结果容易受到驾驶人驾驶风格的影响等问题,故本文采用在路侧进行行人过街数据采集实验,该方法具有采集到的样本量大,驾驶员驾驶风格全面且省时省力等优点。
如图1所示,将激光雷达和高清摄像头安装在路侧距离人行横线10m处对行人过街数据进行采集,其中红色车辆为与过街行人存在交通冲突的车辆。
本文选取西安市碑林区文艺南路某人行横道处作为试验路段,一段时间内试验路段由于重新铺装导致人行横道线被覆盖,故本文所采集的数据包括无信号灯有人行横道路段和无信号灯无人行横道路段两类。试验路段为双向四车道,道路中间为双黄线,限速60km/h,路面宽度约11m,人行横道宽5.5m。
本文试验设备主要为ibeo LUX 4线激光雷达和高清摄像头。ibeo LUX 4线激光雷达探测距离可达200m,水平视角为110°,垂直视角3.2°,距离分辨率为4cm,测量精度满足试验需求;高清摄像头为高清智能行车记录仪,用来采集行人过街时行人与车辆的博弈过程,辅助激光雷达数据的采集和挑选。
如图2所示,红色椭圆部分为行人的激光雷达点云数据,方框部分为与过街行人存在博弈的车辆的激光点云数据,此时车辆的速度为23.3km/h,与行人距离为24m,此时行人采取直接过街的决策。
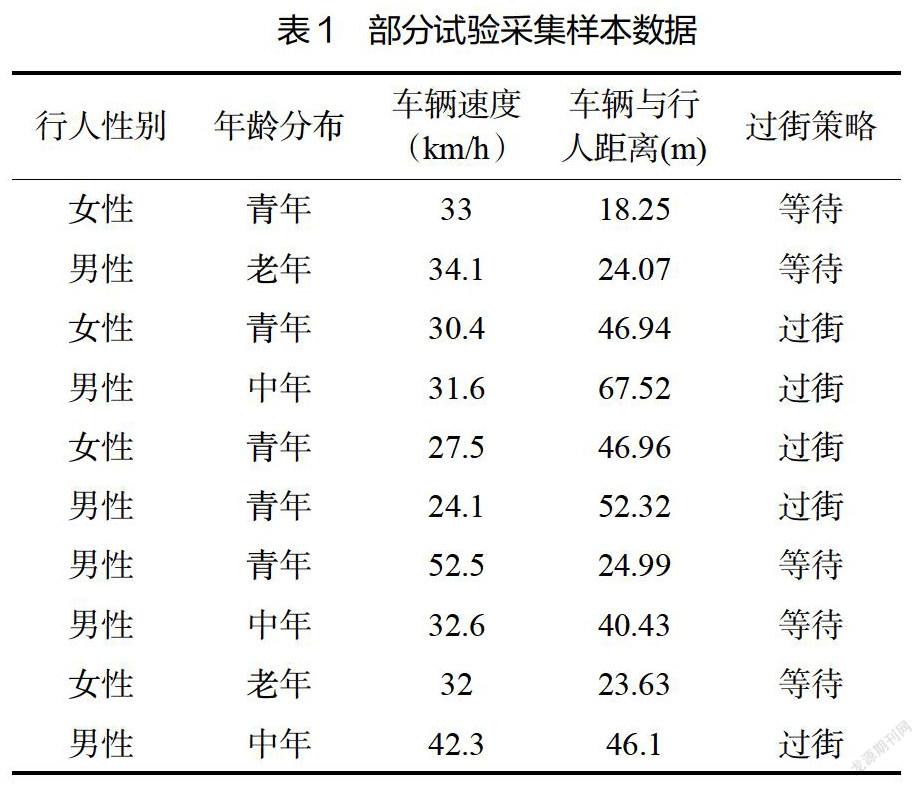
通过数据挑选,本文可采集到行人性别、行人年龄分布、行人过街策略(等待过街/直接过街)、车辆行驶速度和车辆距离行人纵向距离等信息,如表1所示。
二、行人过街特性分析
在人—车混行的交通环境中,行人随机性较大,给驾驶员的驾驶策略选择,尤其是智能驾驶辅助系统的设计带来了极大考验。对混行交通模式下行人过街特性进行分析,对智能驾驶辅助系统的设计有十分积极的影响。
行人完整的过街过程可以分为6个步骤:过街位置选择、过街观察、过街环境感知、过街条件判断、过街决策、实施过街行为,其中,可根据不同路况及不同的过街条件重复或省略部分步骤。
有研究表明,性别和年龄是影响行人过街决策的重要因素,故本文将研究不同年龄和性别对行人过街特性的影响。本文共采集了5432组不同年龄、不同性别的行人过街数据进行行人过街特性的分析。
数据显示,行人过街时速度基本分布在0—8.0km/h范围内,平均速度为2.82km/h,标准偏差为1.681km/h,数据分布范围相对集中。女性过街时速度要略小于男性过街时的速度。造成这种结果的原因可能是男性在生理结构相较于女性更具有优势,且男性心理上承受的安全阈值更低,更具有冒险精神。从图中还可以看出,不论是男性还是女性都存在個别过街速度较大的行人,说明在行人过街时,存在一小部分行人与车辆博弈较为激烈,试验结论与我们的认知保持一致。
为研究不同年龄对过街行为的影响,本文将行人为分为3类,即青年(15—30岁)、中年(30—50岁)和老年(50岁以上)。实验结果表明,老年人的速度最低,且相对更为集中,青年和中年的行走速度相对较快且分散程度较大。试验结论与人类认知基本吻合,不同年龄段行人的心理变化以及生理条件对过街速度的影响较为明显。
车辆的行驶速度及车辆与行人之间的距离是影响行人制订过街策略的重要因素。碰撞时间TTC(Time-To-Collision)能够将两者很好地结合起来,并普遍应用于车辆碰撞预警系统中。故本文在研究行人过街与行驶车辆的博弈问题时,TTC也是一项较为有研究价值的影响因素。在此情景下,可将过街行人模拟为跟车碰撞预警模型中的“前车”,此时行人的纵向速度可忽略不计,仅考虑横向速度。
不同过街策略下TTC对比结果显示,TTC对行人过街策略具有较大影响,当TTC较小时,行人往往采取等待过街的策略,此时TTC位于2.1—3.9s范围内。当TTC较大时,即TTC大于4.4s时,行人往往会采取直接过街的决策。
通过上述分析可以看出,行人性别、年龄以及碰撞时间TTC都对行人过街的决策具有较大影响,故车载行人预警系统在设计时要综合考虑这几个影响因素,以便制订出更加合理的预警算法,提高预警系统的准确率和接受度。
三、行人过街意图预测模型
对路侧行人是否过街进行准确预测对于提高驾驶辅助系统的安全性和准确率具有非常重要的意义。
本文选取了随机森林机器学习算法对行人过街意图进行预测,算法具有效率高、可靠性高和鲁棒性强等特点。随机森林算法是将决策树用作bagging中的模型,实际上是一种bagging方法。首先,m个不同的训练集应用bootstrap方法来产生,每个不同的训练集生成一颗决策树,在节点上寻找特征分裂时,一部分特征随机被抽取,找到最优解,应用于节点上实现分裂。由于bagging的思想,所以随机森林实质上是对样本和特征都进行了采样,很好地解决了过拟合问题[4]。
Bagging算法是一种高效的算法,能适用于多分类和回归等任务[5]。策略过程如图3所示。
调用MATLAB函数TreeBagger,建立随机森林模型,然后对对数据进行训练。
Model=TreeBagger(ntree,train_data,train_label,‘Method’,‘classification’)
其中,train_data指训练的样本数据;train_label指训练样本数据对应的类别标签,本文指等待过街或直接过街两种行人过街策略。
构建好模型之后,带入predict函数和待预测数据集就可得出预测结果。
[predict_label,scores] = predict(Model, test_data)
其中,test_data是待预测数据;predict_label指预测结果;scores为概率分布。
本文分别针对无信号灯有人行横道路段和无信号灯无人行横道路段两类路段进行了预测。
(一)无信号灯有人行横道路段
当有人行横道时,本研究共筛选出2376组行人过街与车辆存在冲突博弈的数据,将数据集分为1900组训练集及476组训练集,进行随机森林模型训练预测。此时模型整体准确率为96.43%,即该模型在无信号灯有人行横道路段能够准确地识别行人的过街意图,可用于车载行人预警系统的设计和优化。
(二)无信号灯无人行横道路段
当无人行横道时,本研究共筛选出1248组行人过街与车辆存在冲突博弈的数据,将数据集分为1000组训练集及248组训练集,进行随机森林模型训练预测,此时模型整体准确率为91.43%,即该模型在无信号灯无人行横道路段仍能够准确地识别行人的过街意图,可用于车载行人预警系统地设计和优化。
参考文献:
[1] 程如中,赵勇,王执中,等. 实时行人检测预警系统[J]. 交通运输工程学报,2012,12(05):110 -118+126.
[2] 公安部交通管理局. 中华人民共和国道路交通事故統计年报[R]. 北京:公安部交通管理局,2019.
[3] 韩亚雄,霍月英. 交叉口行人过街交通特性研究——以呼和浩特市为例[J]. 交通工程,2021,21(01):22-26+32.
[4] 吕红燕,冯倩. 随机森林算法研究综述[J]. 河北省科学院学报,2019,36(03):37- 41.
[5] 王小川,史峰,郁磊,等. MATLAB神经网络43个案例分析[M]. 北京:北京航空航天大学出版社,2013.
(荐稿人:郭应时,长安大学教授)
(责任编辑:邹宇铭)
猜你喜欢
东方教育(2016年9期)2017-01-17 21:04:14
中国经贸(2016年21期)2017-01-10 12:21:20
电子技术与软件工程(2016年22期)2016-12-26 21:36:42
商情(2016年43期)2016-12-23 14:23:13
经济师(2016年10期)2016-12-03 22:27:54
科技创新与应用(2016年31期)2016-12-03 03:33:48
时代金融(2016年27期)2016-11-25 17:51:36
科教导刊(2016年26期)2016-11-15 20:19:33
科学与财富(2016年28期)2016-10-14 21:19:17
商业经济研究(2016年14期)2016-09-14 08:25:44
