一种基于双DQN的空战干扰样式选择方法
2021-11-30 04:30陈泽盛杨承志曹鹏宇邴雨晨
电讯技术 2021年11期
陈泽盛,杨承志,曹鹏宇,邴雨晨,纳 贤
(1.空军航空大学,长春 130022;2.中国人民解放军95510部队,贵阳 550031)
0 引 言
随着机载火控雷达(Airborne Fire Control Radar,AFCR)技术体制的不断发展,其工作状态更加复杂,波形单元更灵活多变,抗干扰能力更强[1],传统的基于人工加载的干扰样式选择方法[2]将失去用武之地。在加载干扰样式正确的情况下干扰机可以产生干扰效果,一旦敌方采取抗干扰措施,我方缺乏先验知识将无法选择合适的干扰样式,作战效能会大打折扣。强化学习由于无需先验知识,且其与环境交互的过程与雷达对抗相似,因此更适用于雷达干扰样式选择。
Q-学习是强化学习中的一种高效的免模型算法。文献[3]设计了基于Q-学习的认知雷达对抗过程,使雷达干扰系统通过自主学习实现高效干扰,但环境雷达的工作状态较少。文献[4]提出了智能雷达对抗(Intelligent Radar Countermeasure,IRC)方法,在工作模式数目未知的情况下通过Q-学习选择最优的干扰路径。文献[5]研究了对多功能雷达(Multifunctional Radar,MFR)的Q-学习认知干扰决策方法,对仿真中各参数对实验的影响进行分析,对比了该方法与其他传统方法的优势。但基于Q-学习的认知干扰决策方法在雷达任务较多的实战条件下决策效率会明显下降,因此文献[6]使用深度Q神经网络(Deep Q Network,DQN)来应对MFR任务较多的问题,但DQN算法存在计算Q值中“过估计”的问题[7]。为此,本文采用Double DQN算法,通过不同的网络执行动作的评估与选择,对这两个部分进行解耦来解决这一问题,对空战中的干扰样式选择进行研究。仿真结果显示了本文算法的有效性。
1 干扰矩阵
现代空战已经进入了超视距时代,AFCR已经成为空战中主要的作战对象,发挥着不可替代的作用。AFCR要在不同的作战环境中遂行多样化的作战任务,因此在雷达系统设计上会设定多种工作模式,不同的工作模式对应着不同的威胁等级。空战中使用较多的是空-空模式下的雷达工作模式,因此本文以AFCR的空-空雷达工作模式为主开展干扰研究。
在典型的空战场景中,我方针对敌方的干扰实施流程如下:首先,我方通过侦察对敌AFCR的工作模式进行识别[8],之后通过干扰样式选择算法从干扰样式集中选择最优干扰样式对其进行干扰,使其工作模式不断转换,直至转换为对应的威胁等级最低的状态,达到预期干扰效果。
根据雷达的工作模式及其转换关系和干扰样式集可以构建出干扰矩阵,将干扰矩阵作为算法输入进行干扰样式选择。
1.1 典型空-空雷达工作模式
空-空模式下AFCR的工作模式[9]主要包括搜索、跟踪、格斗和识别等,每一类模式下又有多种子模式。
1.1.1 搜索模式
速度搜索(Velocity Search,VS)模式主要用于远距高速接近目标的早期预警,威胁等级低。
边搜索边测距(Range While Search,RWS)模式可以在探测目标的同时进行测距,从而快速获取潜在目标的位置信息。
边扫描边跟踪(Track While Scan,TWS)模式[10]主要用于对多个来袭目标的探测和跟踪。在检测到目标后火控计算机会建立跟踪文件,再通过关联算法来对目标未来的参数进行估计。
1.1.2 跟踪模式
态势感知(Situation Awareness Mode,SAM)模式是RWS模式下的一个子模式,可以在单目标跟踪(Single Target Tracking,STT)的方式下同时保持对多个目标的探测,威胁等级较高。
高优先级目标(High Priority Target,HPT)模式是TWS模式的一个子模式,在TWS模式探测到的目标中指定一个为HPT,威胁等级较高。
单目标跟踪模式是AFCR具有最高威胁等级的模式。在选定HPT、SAM模式以及空战格斗模式下的子模式均可进入STT模式。
1.1.3 空战格斗模式
空战格斗(Air Combat Mode,ACM)模式主要用于敌我近距离空战,具有三种子模式。
机炮(Gun Acquire,GACQ)模式下,AFCR的平视显示器(Heads Up Display,HUD)上会出现一个20°视角的虚线圆圈。垂直(Vertical Acquire,VACQ)模式下,HUD上会出现两条距离5°视角的垂直虚线。这两种模式如果探测到一个位于5 n mile内的目标,将自动转入STT模式。
准星(Boresight,BST)模式下,HUD上的水线位置会出现一个3.4 °视角的虚线圆圈,如果探测到目标并位于10 n mile内,将自动转入STT模式。
1.1.4 识别模式
非合作目标识别(Non-cooperative Target Recognition,NCTR)模式[11]是载机通过AFCR利用非合作目标自身的反射特性对其进行远距识别与分类。
1.2 干扰样式集
雷达干扰样式多种多样,每种干扰样式的原理又不尽相同,且对于不同的雷达工作模式作用效果也有所差别。我方机载干扰设备在作战前会进行干扰样式的预加载,用于在作战中的干扰样式选择。本文在干扰样式集的建立上选择了部分典型干扰样式[12],包括相参和非相参干扰样式共10种:0是密集假目标;1是窄带噪声调相;2是灵巧噪声;3是相参梳状谱;4是间歇采样;5是距离-速度联合拖引;6是多普勒噪声;7是扫频噪声;8是全脉冲复制;9是移频干扰。这些干扰样式产生的干扰效果包括压制、欺骗和压制-欺骗联合效果。
1.3 干扰矩阵构建
干扰矩阵的构建可以分为实时建立和非实时建立。实时建立是在作战环境下,由机载侦察设备对敌方AFCR的工作状态进行侦察与识别,根据我方做出干扰样式选择之后敌方AFCR的模式变化来获取雷达的工作模式转换关系,再结合我方的干扰样式集建立干扰矩阵。这种方式几乎没有任何先验知识,干扰样式是否可以起到效果无法得知。非实时建立则是在非作战环境下,依靠侦察设备在平时的战略侦察,我方已对敌方AFCR的工作模式有一定了解,通过对侦察数据的情报分析,对其在一些干扰样式作用下的工作模式转换关系已有一定的先验知识,再通过仿真手段对其他干扰样式进行验证、更新,得到一个较为完善的干扰矩阵。
本文的干扰矩阵是在第二种方式下建立的,并且结合了部分先验知识和开源资料。如表1所示,左侧一栏为威胁等级从高到低排列的工作模式,右侧则是各种干扰样式作用下的工作模式转换关系。

表1 干扰矩阵表
2 基于Double DQN的干扰样式选择算法
2.1 DQN原理与Double DQN的改进
2.1.1 DQN原理
DQN算法[13]是一种从高维的输入学习控制策略的深度强化学习算法。和Q-学习算法相比,DQN将Q表的迭代更新过程转化为一个函数拟合问题,通过用函数来代替Q表产生Q值。
在普通的Q-学习中,Q值更新公式如下:
Q(s,a)←Q(s,a)+α(r+γQ(s′,a′)-Q(s,a))。
(1)
式中:s代表智能体(Agent)当前状态,a′是Agent在下一个状态s′下选择的动作,r表示Agent到达下一个状态得到的奖励值,α∈[0,1]是Q值更新中的学习率,γ∈[0,1]是Q值更新中的折扣因子。Q(s,a)为Q现实值,r+γmaxa′Q(s′,a′)为Q估计值,通过对两者之间的误差学习来更新Q现实值。
在DQN算法中使用神经网络来对Q值进行估计,相近的状态得到相近的输出动作。通过更新网络参数θ来使Q函数逼近最优Q值,如式(2)所示:
Q(s,a;θi)≈Q(s,a)。
(2)
式中:θi是第i次迭代时的神经网络参数。
(3)

损失函数如下:
(4)
MainNet的参数是每次训练均在更新,每隔一定步数将网络的参数值赋给TargetNet。在单步更新中TargetNet参数值不变,Q估计值也不变。
2.1.2 Double DQN的改进
DQN中计算Q估计值时的最大化操作会使得估计的值函数比值函数的真实值大,即会产生非均匀的“过估计”,影响最终决策。作为一种离线学习的算法,DQN每次学习时不是使用下一次交互的真实动作,而是使用当前认为价值最大的动作来更新目标值函数,但是对于真实的策略来说在给定的状态下并不是每次都选择使得Q值最大的动作,所以目标值直接选择动作最大的Q值往往会导致目标值要高于真实值。
在Double DQN算法中动作的选择和动作的评估分别用不同的值函数网络来实现:首先,动作的评估是根据MainNet得到下一状态s′下的Q值最大的动作Q(s′,a′;θi);然后,将这个动作作为计算TargetQ值的动作,用TargetNet完成最优动作的选择工作。Double DQN中TargetQ的计算式如下:
(5)
将上式带入损失函数计算公式,得
Loss(θ)=E[(TargetQ-Q(s,a;θi))2]。
(6)
2.2 Double DQN干扰样式选择方法概述
本文将Double DQN的原理应用于干扰样式选择,其算法模型的流程如图1所示,其中,s∈S表示敌方AFCR在某时刻的工作状态,S代表敌方AFCR的工作状态集;a∈A表示干扰机在某时刻下选择出的干扰样式,A代表我方干扰样式集。当我方侦察设备通过雷达工作状态识别得到s,将此状态输入到Double DQN网络中,经过神经网络拟合得到各个干扰样式对应的Q值,根据ε-greedy策略(该策略可以平衡探索与利用之间的关系来获得累计最大回报)来选取出一种干扰样式a,作用于敌方AFCR。根据敌方AFCR的工作状态转换,我方进行效果评估得到回报r∈。由于敌方AFCR与我方属于非合作关系,我方可以根据遭受干扰后的雷达工作状态的改变来确定干扰的有效性[14],通过对AFCR的威胁等级判定来给出相应的回报值r。干扰机根据回报值来更新Q值,决定下一工作状态s′所要采取的干扰样式,然后将上述的四个变量存入四元组样本〈s,a,r,s′〉中,多条样本组成样本池D。在样本池D中随机抽取一定批量(minibatch)的样本对神经网络进行训练,对网络参数进行更新,然后再进行干扰样式选择,循环往复,直至达到终止状态。
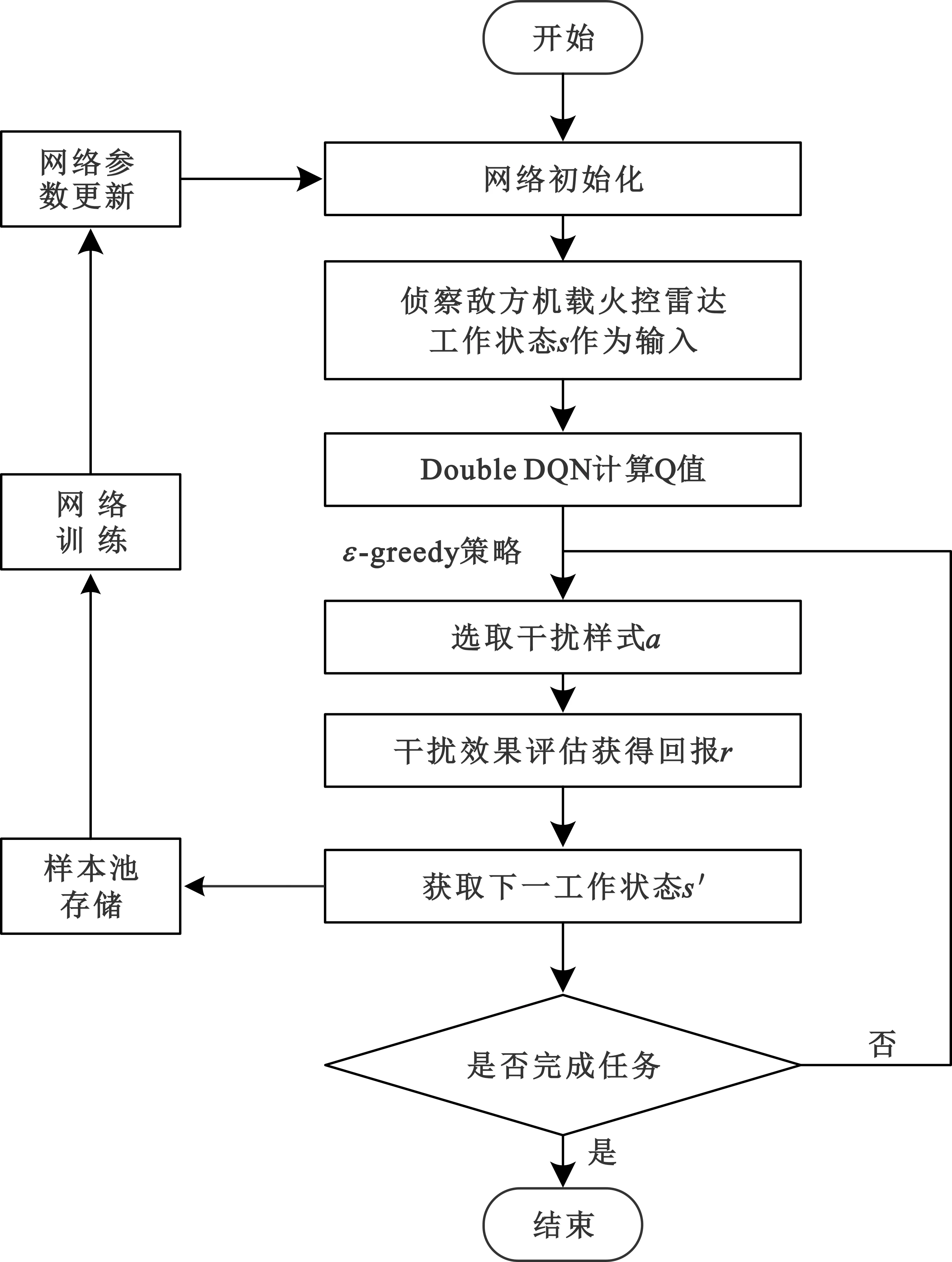
图1 算法流程图
算法的伪代码如下:
1 输入:状态空间S,动作空间A,折扣因子γ,学习率α,迭代次数M
FORi=1:M
2 初始化网络参数
FORs∈S
3 输入侦察到的敌方AFCR工作状态s
4 Double DQN计算Q值并依据ε-greedy策略给出干扰样式a
5 我方通过侦察得到AFCR下一工作状态 ,进行干扰评估得到奖励值r
6 将四元组 存入样本池D,随机抽取minibatch个样本对网络进行训练,更新网络参数
7s为终止状态;
END FOR
8 达到最大迭代次数M
END FOR
由于不同的干扰样式产生的干扰效果不同,压制性干扰样式会使敌方AFCR的工作状态朝着威胁等级降低的方向转变;欺骗性干扰样式会产生欺骗性干扰效果,部分干扰样式可能会使其工作状态的威胁等级朝着升高的方向变化。因此,回报值定义如下:
(7)
式中:TL→min表示AFCR的工作状态威胁等级将至最低;TL↓,ASJ表示采取压制性干扰样式,工作状态向威胁等级降低的方向转换;TL↑,ADJ表示采取部分欺骗性干扰样式时工作状态威胁等级向升高方向转换;TL↔/TL表示工作模式之间没有转换;TL↑表示AFCR工作状态向威胁等级升高的方向转换。
3 仿真验证
本文仿真使用Tensorflow框架编写。计算机配置如下:处理器采用Intel(R)Core(TM) i5-10200H;内存为16 GB。
本文用两个全连接层来近似Q函数Q(s,a;θi)。网络的细节如图2所示,该网络由两个全连接层组成。

图2 值函数拟合神经网络结构
算法的训练参数如表2所示。
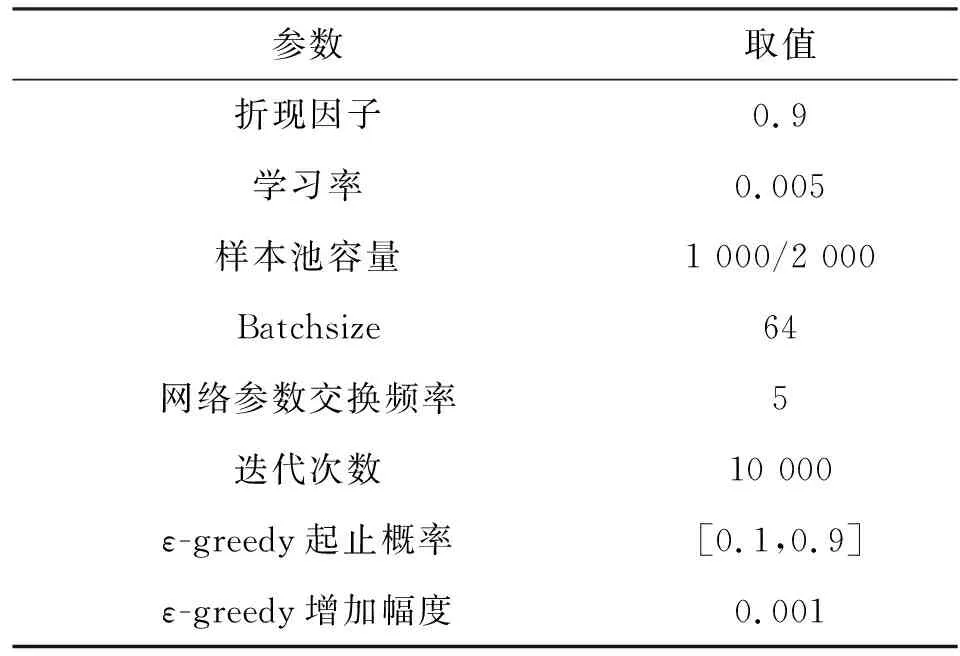
表2 参数设置
在两个网络的参数替换前先观察300步,然后每隔5步将MainNet的参数赋给TargetNet;初始化的ε-greedy策略中ε的初始概率值为0.1,终止概率值为0.9,即初始时有90%的概率随机选择干扰样式,最终有90%的概率选择最优干扰样式,每一次学习都会将ε的值增大0.001,增加到终止值时停止,这样的设置可以在训练的过程中使网络逐渐收敛;每次从样本池的2 000个样本中随机抽取64个样本用于网络训练。
图3是Double DQN算法训练得到的损失图。由于样本量较少,在迭代中选择隔5步交换一次网络参数。在每隔5步交换网络参数后,网络训练损失值逐步下降,但由于初始时刻的ε探索值较低,随机选择干扰样式会导致损失值产生波动,但随着训练的进行,ε探索值逐渐变大,神经网络拟合的Q值越来越准确,损失值在大约750步以后降至0附近,说明网络训练完成。整个训练过程所花费的平均时间为11.7 s,但在实际应用时,网络训练完成之后即可进行干扰决策,所以在实际应用中可以适当减少迭代次数,这样可以提高决策效率,使决策时间控制在秒级,满足实战要求。

图3 网络训练损失
将训练中每次用于干扰样式选择的Q值记录下来,如图4所示,可以看到两种算法的Q值变化趋势一致,在迭代5 500步后收敛至495附近。但是Double DQN算法的Q值消除了一部分过估计,相比DQN算法的Q值较低,计算Q值的平均值可以得到前者比后者低34.01。这也验证了Double DQN算法在解决Q值偏大和网络训练的TargetQ值不准确的问题上具有更良好的表现。
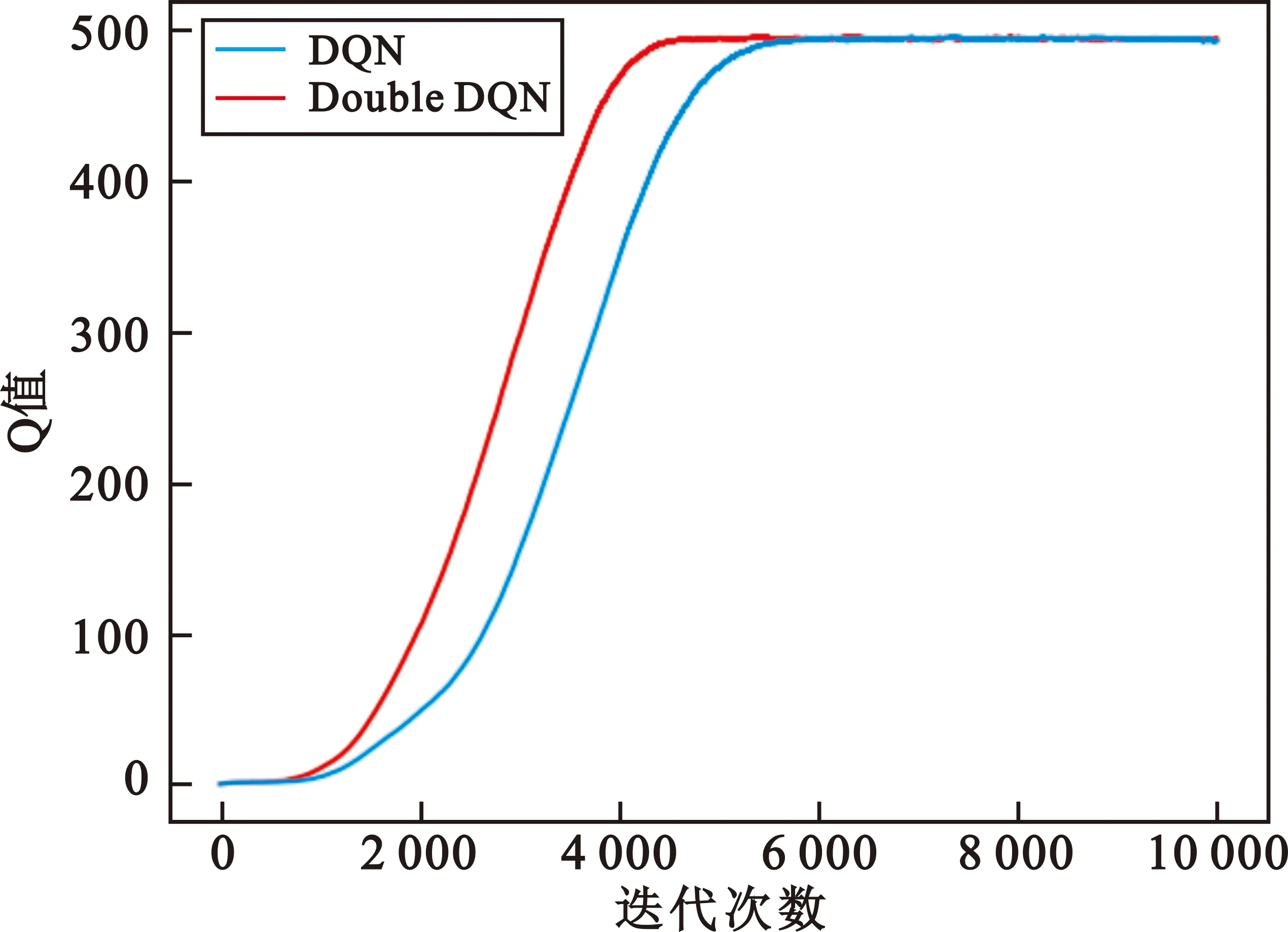
图4 Q值对比
强化学习算法的最终目标都是使总的目标奖励最大化,因此,把迭代过程中每次干扰样式选择产生的奖励值相加得到总的奖励值,对比20次重复实验中DQN与Double DQN两种算法得到的总奖励值,如图5所示。可以发现,在绝大部分情况下Double DQN算法产生的总奖励值要高于DQN算法,这说明在干扰样式选择中选择最优动作比次优动作会获得更高的奖励值,从而验证了本文方法的有效性。

图5 两种算法的总奖励值对比
在参数选择上,折扣因子γ是调节长期回报与即时回报的参数,在仿真中我们更注重长期回报,因此将γ设置为0.9;而学习率α一般取值为0.1,但由于本文仿真迭代次数较多,而且α值过大会引起损失函数剧烈波动,所以经过多次试验将α值设为0.005;样本池的容量没有固定的设置,当训练步数恒定为2 000步时分别设置样本池容量为1 000和2 000,对比两种设置上的损失值情况,如图6所示,可见样本池容量设为2 000时损失值明显高于容量为1 000时的。因此,在训练步数为2 000步时选择样本池容量为1 000。
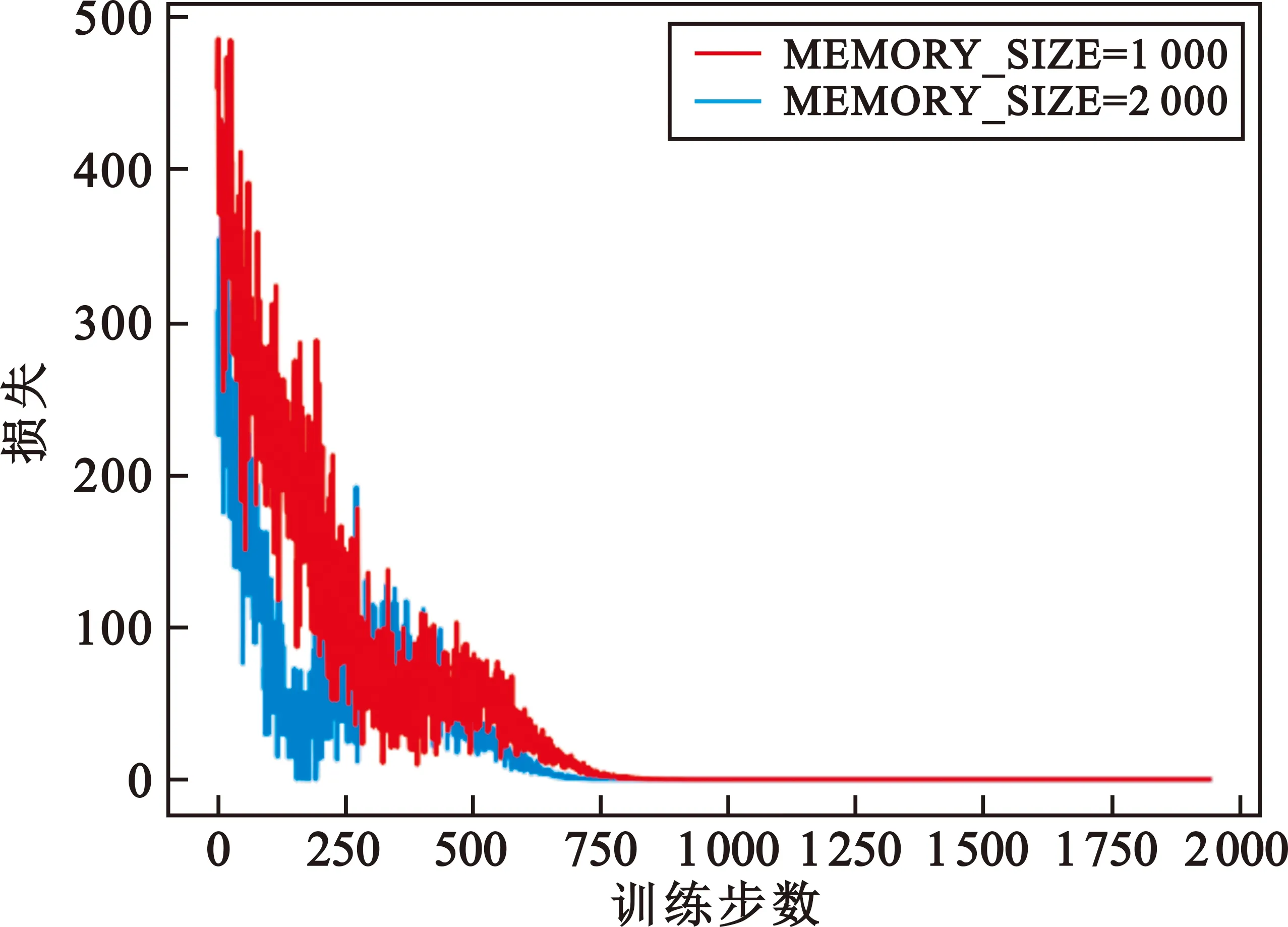
图6 样本池容量对比
根据仿真结果可以得到如图7所示的最优干扰样式选择路径,图中以数字代表具体的干扰样式,根据空战的态势和AFCR雷达的工作模式分为近距和远距两类,分别如图7(a)和图7(b)所示。在不同的干扰样式的作用下,AFCR的威胁等级由高到低逐渐下降;部分干扰样式在不同的态势和工作模式下产生的干扰效果也不尽相同。

图7 最优干扰样式选择路径图
4 结束语
随着机载火控雷达技术体制的不断进步,现代空战中敌我双方的电子战博弈也愈演愈烈。针对空战场景中机载火控雷达与干扰机之间的对抗,本文提出了一种基于Double DQN干扰样式选择方法,在建立干扰矩阵的基础上通过Double DQN算法选择最优干扰样式,仿真实验分析了参数设置,对比DQN证明了其在解决“过估计”问题上的有效性,给出了不同态势下的最优干扰样式选择路径。本文方法也可以为机载自卫吊舱的干扰样式选择提供参考。考虑到目前先进战机均为多用途战机,还可以执行对地、对海突击任务,因此下一步研究中还需对AFCR更多作战模式下的干扰样式选择问题进行探索。
猜你喜欢
天然气与石油(2022年4期)2022-09-21
小哥白尼(军事科学)(2022年1期)2022-04-26
天然气与石油(2021年5期)2021-11-06
天然气与石油(2021年1期)2021-03-08
电子制作(2019年15期)2019-08-27
小学生学习指导(低年级)(2018年12期)2018-12-29
军营文化天地(2017年6期)2017-06-28
火控雷达技术(2016年3期)2016-02-06
百科探秘·航空航天(2015年10期)2015-11-07
百科探秘·航空航天(2015年4期)2015-11-07