基于训练飞行的数据可视化及飞行动作划分
2021-11-30 09:35曹哲路晶岳睿媛庞璐
现代计算机 2021年29期
曹哲,路晶,岳睿媛,庞璐
(中国民用航空飞行学院计算机学院,广汉618307)
0 引言
机载飞行数据记录设备收集记录了非常丰富的、以飞参数据为核心的飞行记录数据,是进行飞行评价分析的重要数据来源。现有的训练飞机安装了综合航电系统,该系统能够对主要的飞行参数进行有效的采样和实时记录,可以反映飞行训练过程中的一些基本特征。
国内外在飞行训练数据的研究主要集中在飞行动作的识别和飞行品质的评价两个方面。毛红保等[1]提出了一种基于奇异值分解的飞行动作评价方法,该方法具有数据降维和去噪的效果,能够实现飞行动作的定量评价。张玉叶等[2]利用主成分分析参数相关度,提取相关度较大参数数据的时序趋势变化特征来提高飞行动作的识别效率。沈一超等[3]使用贝叶斯网络模型对飞行动作进行识别,利用实际飞行数据对形态特征类节点与描述特征类节点进行构建。成肖科[4]采用决策树分类器对飞行过程进行阶段识别,采用参数约简、C4.5决策树算法和识别结果聚类等技术,实现飞行阶段的划分。祁明亮[5]利用快速存取记录器,对飞机着陆阶段出现的某一QAR超限事件,利用优化法和数理统计方法,设计了辅助飞行员针对性训练的分析工具。龙海江[6]利用了QAR数据进行量化分析,找出了引起重着陆的人为原因和环境因素,并且对数据进行了标准化和归一化的预处理,基于层次聚类的聚类处理,完成了着陆阶段的关键飞行参数提取。并且对QAR数据进行了相关性的分析,建立了各个变量与着陆载荷的关联。周超等[7]利用特征优化降维策略,改进了动态时间弯曲算法,实现了高效的飞行操作模式匹配。Xu等[8]提出了一种基于曲线聚类的自动识别重着陆的方法,文章根据不同的重着陆模式进行分类,最后使用k-means的聚类算法实现自动识别,由于飞行训练的飞机动作较为复杂,基于垂直加速度的接地点识别方法在飞行训练中会出现误差。汪磊等[9]应用统计建模方法建立一个重着陆风险定量评价模型。依据重着陆判定参数的分布函数及相应算法评价重着陆发生的可能性和严重性,并计算出风险等级。曹海鹏等[10]利用人工神经网络建立重着陆的诊断模型。Krishna等[11]提出了基于智能飞行数据记录仪的异常动作监控方法,该方法把异常飞行操作形成专家经验数据库,实现了异常飞行动作的智能识别。
本文在飞行规则的基础上进行飞行动作的划分,通过飞行动作的组合特点进行飞行科目的识别,通过实验数据和专家意见对比,证明了该方法的可行性,并且在可视化的基础上改进了通航飞机接地点的识别方法,这种方法对前三点式飞机的识别准确率更高。
1 训练飞行的特点
1.1 数据的获取
在飞行数据采集方面,中国民用航空飞行学院使用的是Garmin提供的G1000系统,数据的收集主要是靠地面人员对机载SD卡进行拷贝,来获取飞机空中的飞行数据。G1000系统的航空电子组件主要有通讯、导航以及姿态等航空电子组件,在172R的飞机上还配备了两个彩色LCD显示器作为PFD和MFD。GIA63集成电子组件是该系统的核心,它主要就是负责采集和处理系统中其他设备输入的数据和控制命令,因此,飞行训练中的数据采集主要就是对GIA63集成电子组件的数据采集[12]。
运输航空数据的传输遵循ARINC717传输规范,分布在飞机各部位的传感器进行数据采集,这些信号传输至DFDAU组件,经过处理之后传至记录器,其中有专门用于飞机着陆识别的电门[13]。
1.2 飞行训练数据的特点
本文所研究的是中国民航飞行学院的飞行训练数据,飞行训练和运输航空明显的区别就是数据波动性较大,每个样本之间的差距较大,产生的这种现象的原因一个是飞行员的差异,另一个就是机型的差异。飞行训练的驾驶员是飞行时长较少的飞行学员,所以各个学员之间水平的参差不齐导致飞行训练的数据差异性较大,而运输航空的驾驶员是飞行时长较长的飞行员,并且对飞行航路有较多的飞行经验;在机型方面,运输航空的飞机是重型机和中型机,而训练所使用的飞机大多为轻型机。
1.3 训练飞行参数
综合航电系统中所记录的飞参数据为结构化时间序列数据,频率为一秒钟采集一次,主要分为飞机轨迹参数和飞机姿态参数。
主要飞机轨迹参数的详细说明见表1,主要飞机姿态参数的详细说明见表2。

表1 主要飞机轨迹参数

表2 主要飞机姿态参数
2 可视化飞行数据
2.1 参数曲线综合可视化
对飞参数据可视化可以找出飞参数据之间存在的关联,为分析事故的产生和起因提供数据支撑。相较于运输航空,训练飞行数据存在更多的不确定性,数据的频率低,数据的波动更加明显,这给数据的分析带来了一定困难。本文使用的综合曲线可视化曲线,选取高度、表速、升降率、垂直加速度、发动机转速和俯仰角等六个飞参数据建立飞行训练数据的综合曲线,选取高度、俯仰角和垂直加速度,是因为接地点的识别需要使用这三个参数,表速、升降率和发动机转速是飞机状态的主要参数,通过这六个参数可以比较准确地判断当前飞机的飞行状态。由于飞参数据之间数值差异较大,在做综合曲线分析时需要将数据做归一化处理,即将数据的变化幅度控制在相近的范围内,否则会出现数据之间数值差距过大,数值难以统一。处理数据的公式如下:
其中x为归一化之后的数值,x0为原始数据的数值,xmax和xmin为原始数据中最大值和最小值。使用Python可视化模块,选取飞行数据中接地附近的数据段建立综合参数曲线,如图1所示。

图1 参数曲线综合可视化
从曲线综合可视化的图表中可以找到数据之间的内在联系,如在飞机着陆阶段俯仰角逐渐增大,主轮接地时俯仰角达到最大,之后减小,垂直加速度会在主轮接地时达到最大,利用这个特性完成对飞机接地点的识别。通过飞机姿态的改变频率和幅度的变化分析此次飞行的质量。如果飞行姿态的变化过大,除却必要的飞行动作,最有可能的就是进行了粗猛操作。
2.2 基于综合参数的接地点识别方法
我国的民航法规《航空承运人飞行品质监控实施和管理》规定,在接地前5 s内到接地后2 s内,着陆垂直载荷大于1.6 g为轻度偏差,大于1.8 g为严重偏差。使用飞参数据对飞机着陆情况进行分析是解决重着陆问题一个非常有效的方法。
在研究着陆品质以及接地点的识别中,运输航空的接地点识别有专门的电门提供着陆信号,而飞行训练所使用的飞机没有安装着陆识别电门,所以接地点的识别需要根据飞参数据中的参数识别。在传统的接地点识别中经常会使用到的是升降率这一参数,而在训练飞行中使用单一的升降率参数很难准确的识别,原因主要有两个:①由于飞行训练本身的特性,学员的飞行质量较低,容易出现误判。②飞行训练中存在类似着陆阶段的改变下降率和俯仰角的情况,这使得很难把着陆和飞行动作区分开。基于升降率的识别接地点的方法在飞行训练中存在不足,本文提出使用俯仰角的识别方法,并且增加无线电高度和垂直加速度这两个辅助识别参数,增加这两个参数的原因是为了把在空中的飞行动作和真正的着陆阶段区分开来,保证每一次识别出的结果都是真正着陆的结果。
选用俯仰角的识别方法是根据塞斯纳172的结构特性,飞机在着陆时先是主轮接地,然后前轮接地,而前三点式飞机在接地前会有平飘的过程,即在接地前拉大飞机的俯仰角度,这种着陆顺序必然使飞机主轮接地瞬间俯仰角达到最大,之后俯仰角减小,在前轮接地后保持平稳。如图2所示。

图2 着陆飞机拉平示意图
基于这种着陆特性,选取在着陆阶段俯仰角最大的点作为飞机的主轮接地点,俯仰角首次达到飞机平放时的俯仰角作为前轮接地点,通过比对两个接地点时刻的垂直加速度的大小判断着陆是否超限。
安装在飞机上的飞行数据记录仪可以随时对飞机姿态变化进行记录,在中国民航飞行学院的机队中,飞行训练数据可以记录包括经纬度、海拔高度、升降率等重要的飞参数据,为飞行训练的评估和提升飞行学员的飞行质量提供了数据支持。建立综合曲线模型,如图3所示。
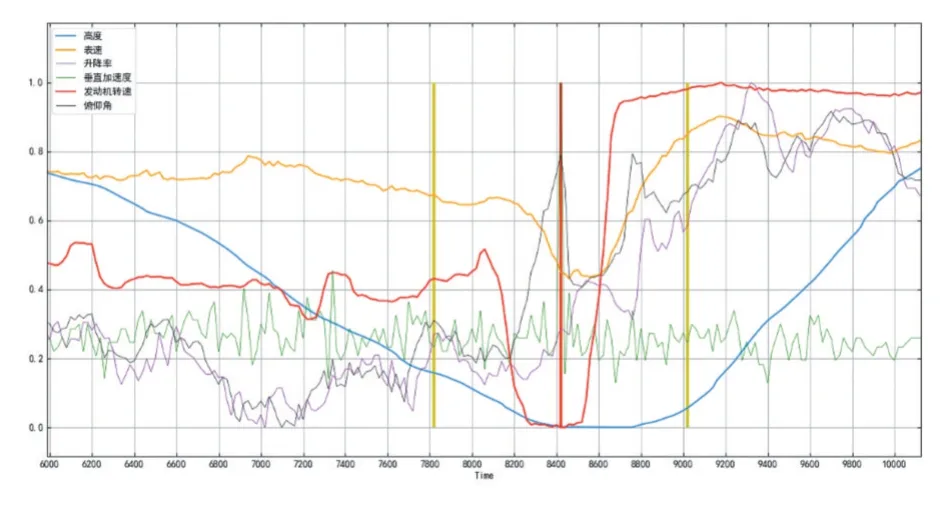
图3 飞机接地点识别
在着陆阶段中将俯仰角最大的值判定为主轮接地点,此刻的垂直加速度达到最大,在过后第50个数据首次下降到平放俯仰角即为前轮接地时刻。
3 飞行动作的划分
3.1 数据的预处理
本文采用的数据平滑去噪的处理方法是卷积平滑算法(Savitzky-Golay)。该算法的思想是用一个窗口宽度为2m+1的窗口对数据进行滑动滤波,对于窗口内的数据用的一个n阶多项式拟合:

根据文献[14],得知的最小二乘拟合的残差为:
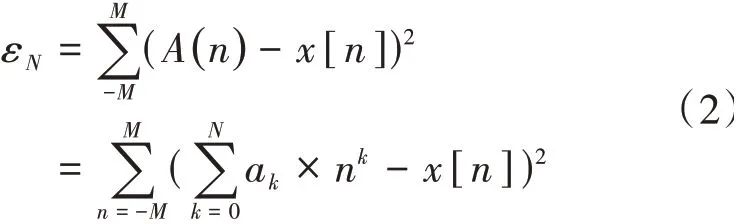
利用卷积运算求取拟合多项式常数项,对输入数据进行加权平均,求偏导化简之后有:

令A={ani},ani=ni,-M≤n≤M,0≤i≤N,B=ATA,则可以得出:

最终可以得出:

H就是卷积系数。
在Python中的实现如图4所示。

图4 数据平滑处理
蓝色曲线是原始飞行训练数据,橙色曲线是经过卷积平滑后的数据曲线。
经过卷积平滑后的数据保持了数据的整体趋势,而且消除了噪声带来的误差干扰。
3.2 动作的划分规则
飞行动作的种类主要分为四种,即爬升、平飞、下降和转弯,所有的飞行都是基于这四个飞行动作的排列组合,对飞行动作的精准划分是对飞行科目识别和飞行品质评价的基础。详细的动作划分规则如表3所示。

表3 飞行动作的种类
飞行训练中主要涉及的飞行科目有起落航线、沿DME弧飞行、盘旋等[15],本文针对这三个科目进行飞行科目的识别,对于一个标准起落航线科目来说,由“爬升+平飞+转弯+平飞+转弯+平飞+转弯+平飞+下降+转弯+下降”组成的,它的符号表示为[A,B,C,B,C,B,C,B,D,B,D]。为了提高科目识别的准确性,本文将例如起落航线这种复杂的科目定义范围扩大,只需满足8个飞行动作即可判定为起落航线科目。沿DME弧飞行科目由“转弯+航向改变约270°+转弯”组成;盘旋由“转弯+航向改变大于270°”组成。
3.3 动作划分
使用Python可视化平台对数据进行建模和划分,将飞行动作之间用红色点划分,飞行动作划分的流程图如图5所示。

图5 飞行动作划分流程
通过动作划分规则区分爬升、转弯和下降动作建立坐标系,x轴、y轴分别为经度和纬度,z轴为高度,以机场标高为0,如图6—图8所示,分别是某次飞行训练的爬升片段、转弯片段和下降片段。

图6 飞机爬升动作

图8 飞机下降动作
图6 红色轨迹为某次飞行训练中爬升的片段,图7红色轨迹为某次飞行训练中转弯的片段,图8红色轨迹为某次飞行训练中下降的片段。通过对划分出的飞行动作片段进行组合识别,进行飞行训练科目的识别。
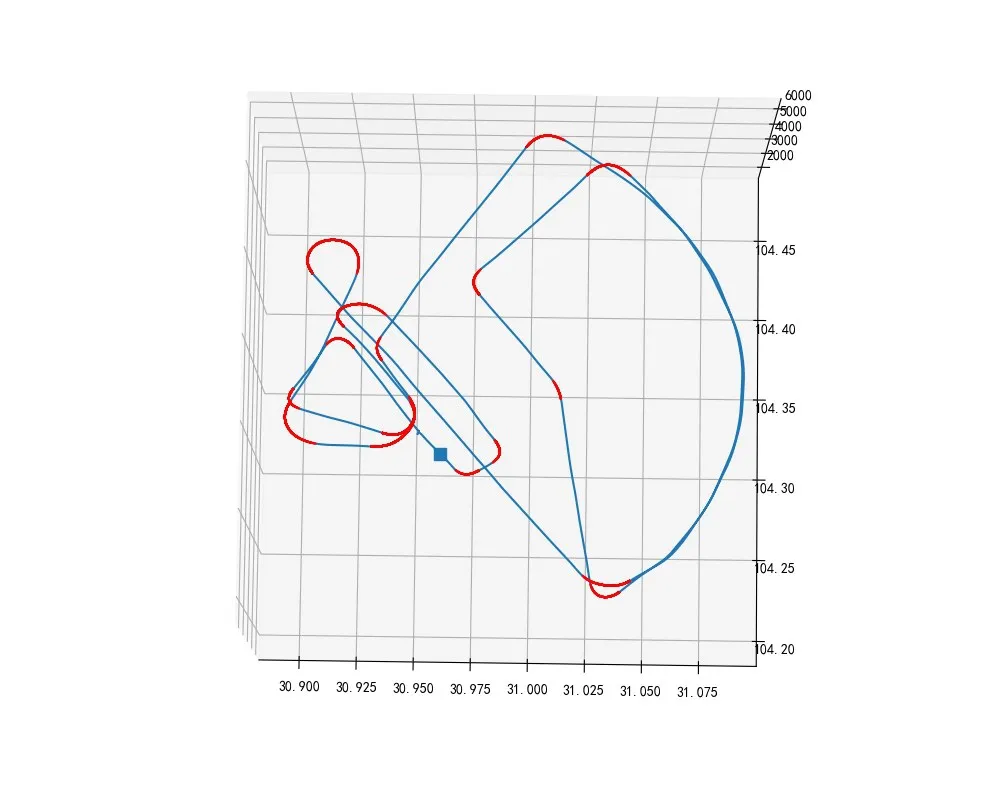
图7 飞机转弯动作
3.4 科目的可视化
通过对飞行动作的划分,完成飞行科目的自动识别,对起落航线、沿DME弧飞行和盘旋三个科目进行识别,使用Python平台完成可视化,结果如图9—图11所示。

图9 起落航线

图11 盘旋
根据3.2节对飞行科目的划分依据,进行飞行动作的识别,如图9、图10和图11所示,分别为起落航线、沿DME弧飞行和盘旋的识别结果,结果表明,使用飞行动作片段的方法在科目的识别上具有可行性,但在实际过程中存在的一些非标准的科目,在识别上还存在困难。
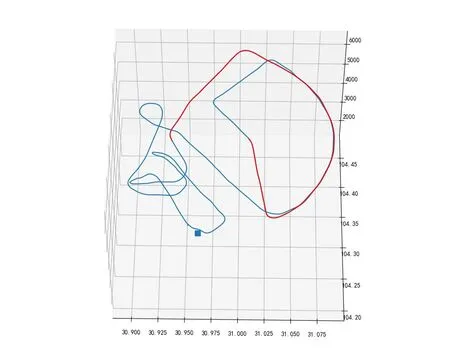
图10 沿DME弧飞行
4 结语
本文针对飞行训练的特点,以及参数综合曲线的特性,提出了一种基于俯仰角为主,无线电高度和垂直加速度为辅的接地点识别方法;通过飞行动作的特征,制定动作划分规则,将整个飞行划分成数个飞行动作,通过动作的符号串匹配飞行科目。实验表明,基于飞行动作片段的飞行科目识别方法具有可行性。
猜你喜欢
工业设计(2022年4期)2022-05-17
师道·教研(2022年1期)2022-03-12
意林·少年版(2021年3期)2021-04-13
智富时代(2019年7期)2019-08-16
智富时代(2019年7期)2019-08-16
智富时代(2019年6期)2019-07-24
智富时代(2019年6期)2019-07-24
科技创新与应用(2018年35期)2018-02-28
环球时报(2017-11-23)2017-11-23
山东工业技术(2017年19期)2017-09-27