
基于差分法的道路上下坡识别
2021-11-26 07:20薛方王军王鹏
汽车实用技术 2021年21期
薛方,王军,王鹏
基于差分法的道路上下坡识别
薛方,王军,王鹏
(陕西重型汽车有限公司 汽车工程研究院,陕西 西安 710200)
在商用车大数据研究领域,通常需要基于后台数据分析车辆长上坡和长下坡时的运行工况、车辆性能、油耗、驾驶习惯等。因此,如何精准地将车辆运行轨迹中的上下坡识别出来至关重要。论文提出一种基于差分法的道路上下坡识别方法,首先,使用中值滤波法对车辆采集的GPS数据(经度、纬度、海拔)进行数据平滑去噪,然后通过一阶差分法对海拔数据进行上下坡识别,最后对上坡,平路,下坡段进行优化,标记,提取,得到了区分度较好的上下坡。
上下坡;中值滤波;平滑;一阶差分
前言
随着车载终端的普及和信息化的发展,车辆运行数据作为设计开发、整车动力匹配设定、区域化配置选用、年度产品开发规划的重要支撑,越来越受各企业重视。而车辆运行数据算法开发的准确性和适应性,是一切决策的基础。
在生产实践与科学研究中,通常需要研究某个地域长上坡,长下坡车辆的运行状况、动力匹配、水温、驾驶行为等。因此,精准识别上坡、下坡、坡度等信息,对进一步的汽车数据研究有着至关重要的影响。但是受实验或测量精度影响,通常采集回来的数据精度较差、噪音点较多,因此,许多学者研究了诸多算法来解决去噪的问题[1-2]。本文使用中值滤波法对车辆采集的GPS数据(经度、纬度、海拔)进行数据平滑去噪,然后通过一阶差分法对海拔数据进行上下坡识别,最后对上下坡及平路段进行优化、标记、提取,最终得到了区分度较好的上下坡路段数据。
1 中值滤波原理
通常情况下,采集的数据受采集精度的影响会出现抖动的情况,因此需要对原始数据(信号)进行去噪处理,保持原有信号的前提下,对噪音进行去除。中值滤波就是把一组信号或者图像中的一点的值用该点的一个邻域中的各点值的中位数代替,中值滤波是属于非线性的平滑滤波技术的一种。
一维中值滤波的原理:中值滤波器是一个滑动窗口,它有奇数个点,它的去噪原理是将窗口正中那个位置点的值用该点某邻域窗口内各点的中值来进行代替。
对于一维样本=(1,2,……, X),有个点,使用窗大小为(为奇数且大于1)进行中值滤波,那么窗口正中那个位置就是=int(/2)+1(高斯取整然后加1)。即当=3,=2;=5,=3;=7,=4……因此得到一阶中值滤波公式为:
'=('1,'2,……,') (1)
(1)当≤≤−+1时,'就是(X(−1),…, X1, X, X1,…, X(−1))的中位数;
(2)当<时,'就是前2−1个值的中位数;
(3)当>−+1时,'就是后2(−)+1个值的中位数。
本文取7个点(点的个数对平滑结果有很大的影响,一般根据经验和数据采集精度取值)对里程-海拔数据进行中值滤波,有'1=1;
'2=(1,2,3);
'3=(1,2,3,4,5);
'=(X(−1)…, X1, X,X1,…, X(−1));
(4≤≤−3)
'−2=(X−4, X−3, X−2, X−1, X)
'−1=(X−2, X−1, X)
'−1=X。
滤波效果如图1—图3所示。
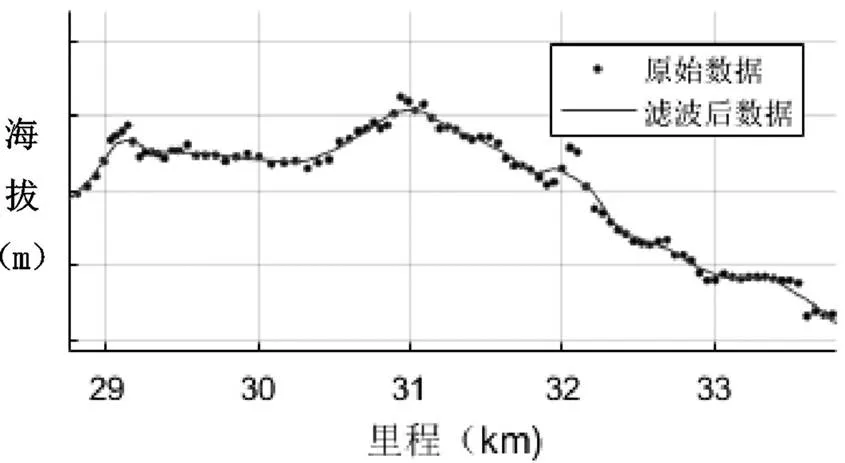
图1 第一组里程-海拔数据使用中值滤波前后对比

图2 第二组里程-海拔数据使用中值滤波前后对比

图3 第三组里程-海拔数据使用中值滤波前后对比
2 差分原理简介
2.1 一阶差分
设函数=(),式中只对在非负整数值上有定义,在自变量依次取遍非负整数,即=0,1,2,…时,相应的函数值为(0),(1),(2),(3),…简记为0,1,2,3,…
定义1 当自变量从变到+1时,函数=()的改变量△y=(+1)−(),(0,1,2,…) 称为函数()在点的一阶差分,通常记作:
△y= y+1−y,(0,1,2,…) (2)
2.2 高阶差分
定义2当自变量从变到+1时,一阶差分的差分:

称为函数= y的二阶差分,记作△2y,即:
△2y= y+2− 2y+1+y(4)
同样,二阶差分的差分称为三阶差分,记为△2y,即:
△3y= y+3− 3y+2+3y+1−y(5)
依次类推,可得函数=()的阶差分为:
△y=△(△−1y) =△−1y+1−△−1y(6)
3 基于一阶差分法的上下坡识别
对滤波后的海拔数据进行一阶差分,大于0的为上坡,标记为1,小于0的为下坡,标记为-1,等于0的为平路,标记为0。识别效果如图4—图6所示。

图4 第一组上下坡识别结果
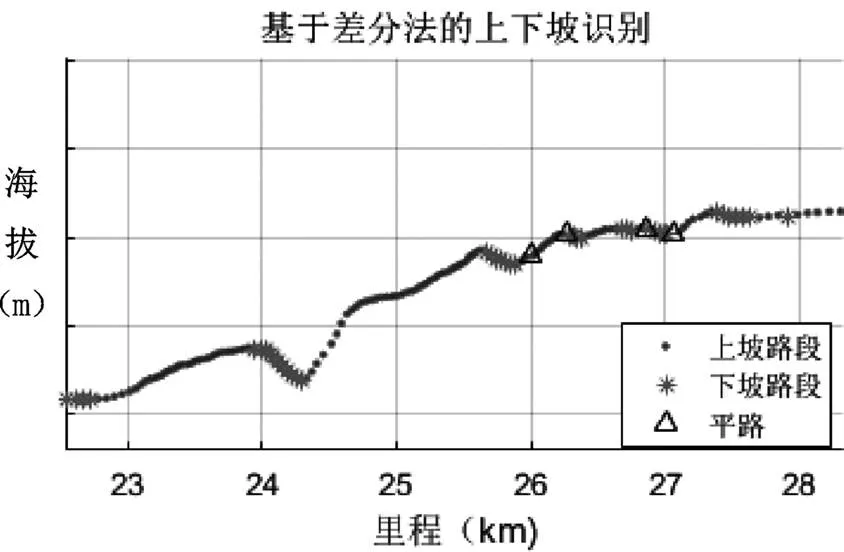
图5 第二组上下坡识别结果

图6 第三组上下坡识别结果
由于数据的波动和噪音并不能完全的去除,除了数据本身的质量问题外,使用中值滤波窗大小直接影响曲线的过拟合和欠拟合,所以我们对结果进行进一步的优化处理。优化逻辑如下:
(1)如果平路的里程小于0.1 km,把平路合并为平路前的路;
(2)如果上坡的里程小于0.1 km,把上坡合并为上坡前的路;
(3)如果下坡的里程小于0.1 km,把下坡合并为下坡前的路。
优化结果见图7—图9所示。
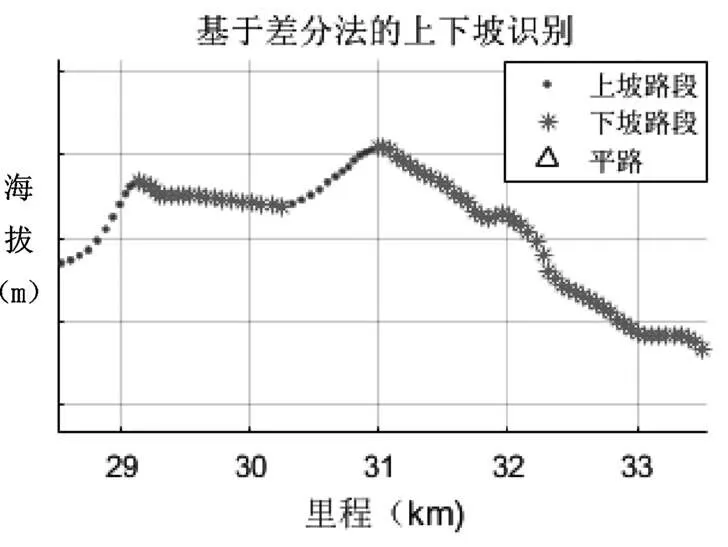
图7 第一组上下坡识别优化结果

图8 第二组上下坡识别优化结果

图9 第三组上下坡识别优化结果
4 结语
理论上一阶差分法对于上下坡的识别效果比较好,但是由于数据采集设备的精度问题,会造成各种噪音,有些噪音是不可消除的,即使对原始数据进行了去噪处理,但是由于过拟合和欠拟合等原因,会造成数据失真。所以上下坡识别的准确度和采集数据的质量息息相关。
[1] 王宇新,贺圆圆,郭禾,等.基于FPGA的快速中值滤波算法[J].计算机应用研究.2009,26(1):224-228.
[2] 唐娅琴.几种图像平滑去噪方法的比较[J].西南大学学报(自然科学版).2009,31(11):125-128.
Road Uphill and Downhill Slope Identification Based on Difference Method
XUE Fang, WANG Jun, WANG Peng
( Automobile Engineering Research Institute, Shaanxi Heavy Duty Automobile Co., Ltd., Shaanxi Xi’an 710200 )
In the field of commercial vehicle big data research, it is usually necessary to run the operating time based an background data to analyze the long slope and long downstream of the vehicle’s conditions, performance, fuel consumption, driving habits, etc. Therefore, how to accurately identify the up and down slopes in the vehicle's running track is crucial. This paper proposes a road-based slope recognition method based on the difference method. Firstly, the media data filtering method is used to smooth the data (GPS) (longitude, latitude, altitude) collected by the vehicle, then apply the first-order difference method to identify the ups and downs of the altitude data, and finally optimize the uphill , flat road, and downhill sections, transform, mark, extract, get up and down slop with better discrimination.
Uphill and downhill; Median filtering; Smooth; First order difference
10.16638/j.cnki.1671-7988.2021.021.023
U469
A
1671-7988(2021)21-95-03
U469
A
1671-7988(2021)21-95-03
薛方(1989—),女,硕士研究生,工程师,就职于陕西重型汽车有限公司汽车工程研究院,研究方向:数据挖掘,机器学习,深度学习,控制策略。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
文萃报·周二版(2022年23期)2022-06-11
做人与处世(2022年2期)2022-05-26
世界知识(2022年3期)2022-03-01
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
上海师范大学学报·自然科学版(2018年3期)2018-05-14
计算机应用(2016年10期)2017-05-12
红蜻蜓(2016年6期)2016-05-14
作文与考试·初中版(2016年12期)2016-04-20
知识窗(2015年1期)2015-05-14
