一种基于机械臂技术的网联自动化测试方案
2021-11-23 08:51盘玉莲
时代汽车 2021年22期
盘玉莲
摘 要:随着智能网联汽车的高速发展,智能网联系统技术日新月异,针对智能网络系统的测试工作也越发具有挑战性。目前智联网联系统的实车测试工作主要还是依靠纯人力进行,依然存在测试慢,且不全面的现象。针对上述所描述的现象,我们可以对这些问题,发明一款能代替人力来进行测试的设备,机械臂就是我们的研究对象,在不缺失用户体验的情况下,它能完全代替人力来对那些规律且单一的测试项进行测试。
关键词:智能网联 智能座舱 自动化 台架测试 机械臂
A Networked Automation Test Scheme Based on Robotic Arm Technology
Pan Yulian
Abstract:With the rapid development of intelligent networked vehicles, the technology of intelligent networked systems is changing with each passing day, and the testing of intelligent networked systems is becoming more and more challenging. At present, the real-vehicle testing work of the intelligent networked system is mainly carried out by pure manpower, and there is still a phenomenon of slow and incomplete testing. In response to the phenomenon described above, we can invent a device that can replace manpower to test these problems. The robotic arm is our research object. Without missing user experience, it can completely replace manpower to test regular and single test items.
Key words:intelligent network connection, intelligent cockpit, automation, bench test, robotic arm
1 背景技术
就目前机械臂的研究领域,对于制造业来说,已相对成熟了,并且得到了广泛应用。相对于智能网联车机方面的测试,目前还比较薄弱,且存在以下问题:1、智能网联系统的各个软件更新迭代快,人力测试难以跟上软件开发的步伐。2、测试工作较为枯燥且千篇一律,长久进行同样的工作易使测试人员产生疲惫感,测试过程难以把控。3、功能測试用例条目较多,稳定性测试耗时长,在有限的时间内人力无法完全进行测试,容易造成问题遗漏。4、传统的人力测试需要大量的测试人员投入,容易造成人力资源的浪费。
那我们能否就这些方面,将机械臂自动化这项技术转移到我们车辆智能座舱的测试方面呢?答案是肯定的,并且也能得到很好的应用。对于这种测试要求不是特别高,并且结构规律循环,我们完全可以用机械臂来代替我们人力来进行测试,并且还能使我们的测试得到更好的管控,而且也很全面。
2 技术方案
2.1 方案介绍
(1)基于三自由度机械臂,配合图像和文字识别技术,模拟人的点击、双击、滑动、语音控制等操作,实现实车智能网联系统的自动化测试。
(2)量化具体的测试指标,覆盖全功能测试、可靠性测试、稳定性测试等测试内容。
2.2 具体实施方案
现有智能网联系统实车测试需要靠人力进行,系统更新发版时间较快,测试项覆盖范围广且繁多,实车测试效率较低,难以跟上开发所需验证的步伐,且测试覆盖度及一致性得不到保证,人力资源投入大。
本专利开发智能网联系统实车自动化测试方法,系统对机械手模拟人手的操作都进行了高度封装,主要动作包括单击、双击、长按、滑屏、拖动、唤醒、灭屏、图像验证、条件判断和循环等,机器人从客观上去模拟用户实际体验对车机进行地各种操作和检测。可以根据图像自动识别算法去检测界面功能是否符合预期;显示文本是否正确。合理安排和使用步骤不仅可以提高检测精度,还可以提升用例健壮性。实现车机智能网联系统的实车自动化测试,量化具体的测试指标,覆盖基本功能测试、软件稳定性测试、可靠性测试等测试业务。主要实现方式如下:
(1)三轴机械臂:设备配置三自由度机器人,以满足人机交互测试对触控动作的仿真需求。通过上位机软件可以控制机械手完成单机、双击、滑屏、快速滑屏、连续滑屏、连续点击、拖拽、长按等操作。
(2)程控USB:通过上位机对USB的控制,可实现车机与U盘或手机的USB通断功能,从而实现车机通过USB连接的多种功能。
(3)夹具:设备配有专用夹具,用于固定被测设备。该夹具可以固定2款大尺寸设备或四款小尺寸设备(如手机)。夹具调节方式灵活,满足不同设备的固定。1、夹持方式:“旋钮”配合“齿轮、梯形丝杆、直线滑轴”前后夹持式;2、产品兼容:“前后、左右、上下”微型调节结构设计,以兼容不同尺寸规格产品;3、前后传动原理:圆周运动通过锥形齿轮、梯形丝杆转换成直线运动。
(4)设备配置2组机器视觉相机,其中包含2个高清工业相机和2个高速相机。高清相机为500万像素,通过图像识别方式定位机械手操作坐标及验证界面迁移结果是否正确;高帧相机帧率为120fps,相机高频率采集图像,配合图像处理算法,自动计算响应时间、流畅度。
(5)高清相机设置:“高清相机”即“定位相机”点击“屏幕范围”后的“获取”,精确框选车机或手机的显示区范围,框选好车机或手机屏幕后,摄像头就只把获取到的框选区域传输到PC端进行操作。注:屏幕偏暗时系统无法自动框选屏幕范围,可手动框选或更换识别度较好的屏幕背景。
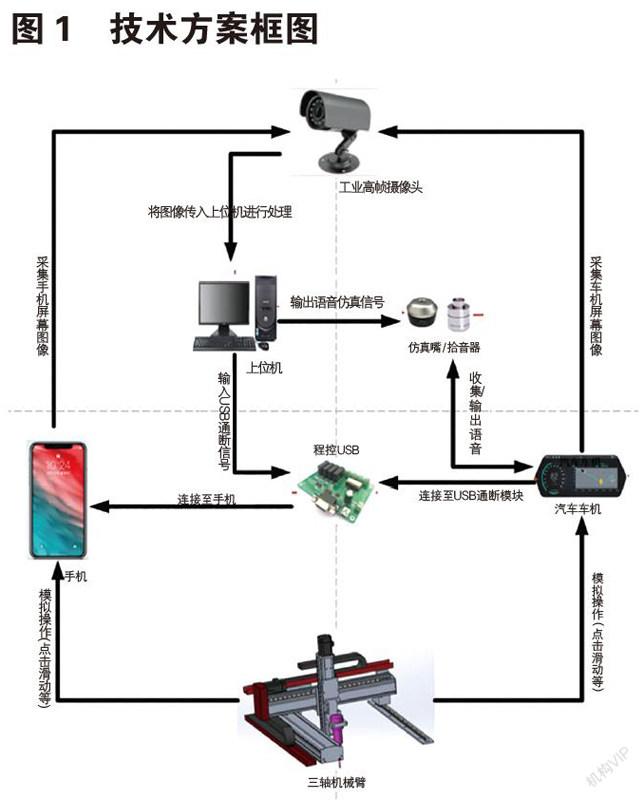
本技术的方案框图如下:
实施方法:首先需要把测试前的脚本写好,通过摄像头去获取手机或者车机屏幕中目标元素,针对该元素我们可以使用机械臂对其进行定位点击操作,并且可以先针对预期结果进行模板保存操作,以便于对测试过程中出现的目标元素进行对比,在测试时获取实际界面,根据所述模板信息判断实际界面相对于目标界面是否测试通过;若测试通过,则获取待操作模板的預设参照位置引导机械臂进行下一步测试操作,根据测试需求对摄像头采集的图片进行灰度测量,自动框选出屏幕区域作为目标界面,将实际界面的界面元素和所述模板进行对比,所述实际界面的界面元素信息与模板信息匹配地越多,实际界面与目标界面的相似度越高;若相似度大于对比阈值,则判定测试通过;若相似度小于或等于对比阈值,则判定测试不通过。
3 该技术所解决的技术问题
1、智能网联系统更新迭代快,导致测试不及时、不充分问题。
2、零件测试周期过长,测试过程难以把控问题。
3、传统测试人力资源投入较大问题。
4 该技术所带来的有益效果
1、基于机械臂的自动化测试可24小时进行,此方案可提高测试效率,减少零件开发周期,快速应对软件版本的更新迭代所需要的测试。
2、此方案采用自动化的测试方式,可减少实车测试人员资源的投入,更好的把控测试过程,充分利用时间进行测试,降本增效。
5 技术层面的创新点
1、将三自由度的机械臂、对应测试对象的夹具及上位机自动化测试平台等设备集成开发运用为手机软件和车机的自动化测试方法。
2、将机械臂代替人手模拟操作,在车机与手机软件的开发周期内进行大量的功能与稳定性测试,能充分利用时间进行测试。
3、机械臂将模拟人为实操,从客观上去模拟用户实际体验测试,把从人眼等感官上发现的软件问题一一暴露,协助开发人员进行软件优化。
4、该技术可很大程度上降低人力资源的投入,解放双手,并且能够并行工作,达到创新创造、降本增效的目的。
6 结论
随着日益增长的生活和物质需要,人们也越来越依靠科技进步所带来的便利。
机械自动化设备的实用型应用技术。实用型的机械自动化设备应用技术,是目前应用最为广泛的技术,此类应用技术的主要目的在于提高机械设备的运行效率在不同类型商品生产与制作流程中提高设备适应性,为工业企业提供最大程度的生产动力;此类应用技术的应用优势在于提升机械自动化设备的应用效率,使其能够最大程度减小操作难度,适应于更多工业企业的生产与制作环节,满足工业企业的实际操作需求 由于机械自动化设备在工业企业中应用广泛,工业企业的需求需要以实用为主,对机械自动化设备的实用性、运行效率要求较高。因此,工业企业中的机械自动化设备应用从低到高的技术难度与从简到繁的进化程序,以适应工业企业生产与制作的实际要求,保证机械设备的运行效率。
伴随着机械自动化的发展, 其技术会越来越广泛地应用到其他各个领域中。 机械自动化技术的发展为解决人才就业问题贡献了力量。 随着今后科学技术水平的不断提高,机械自动化技术也会不断地发展和进步 随着国民经济的不断发展,机械自动化技术已经渗透到了我国国民经济各个部门,如今,我们应该立足国情,走自己的机械自动化技术发展道路,勇于实践、敢于探索创新。这样才能形成高质量、高效益的机械自动化之路
自动化测试可以将产品的知识固化到脚本中,以降低测试人员流动对项目造成的影响。但是这个优势的前提是,这些脚本易于维护,这就需要一些必要的文档,这又是另一个议题了。虽说有些测试层面,可能自动化测试无法做到,但是对于那些反复测试,规律循环,结构单一的测试项,自动化还是具备有优势的。
严格来讲,自动化测试每个阶段都在做测试脚本维护,但是一个不值得维护的自动化测试项目是不值得立项的。
参考文献:
[1]基于Kinect的冗余机械臂直线推移操作控制郭迪孙富春刘华平黄文炳,20132013年中国智能自动化会议.
[2]EAST遥操作柔性内窥机械臂三维虚拟仿真系统研究.苏兴卢俊国,2014第26届中国控制与决策会议.
[3]一种七自由度冗余机械臂阻抗控制研究.华磊.张福海.付宜利,2013第十届中国智能机器人会议.
[4]基于模糊趋近的移动机械臂目标抓取方法.焦继乐.曹志强.赵鹏.谭民,2013第十届中国智能机器人会议.
猜你喜欢
农机使用与维修(2016年12期)2017-01-17
安徽理工大学学报·自然科学版(2016年1期)2016-12-14
计算机教育(2016年7期)2016-11-10
中国市场(2016年36期)2016-10-19
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
现代电子技术(2015年17期)2015-09-23