
民航运输飞机重着陆研究综述
2021-11-23 12:59钱宇,叶亮
科学技术与工程 2021年31期
钱 宇, 叶 亮
(中国民用航空飞行学院飞行技术学院, 广汉 618307)
安全是民航业永恒的主题,起降阶段是飞机事故发生高风险阶段,着陆过程包括下滑、拉平、接地和着陆滑跑。重着陆是指飞机在接地瞬间垂直方向上的载荷超过规定值的一类超限事件。虽然飞机的起落架都设计有缓冲装置将大部分撞击的能量通过压缩减震器中的油液空气,使其高速穿过小孔以热能方式耗散冲击产生的能量,但是起落架减震支柱的压缩行程有限,而且随着压缩行程的增加,传递给机身的作用力也会越大[1-2],轻则影响乘客乘坐体验,重则可能会导致机体结构损伤并产生次生伤害以至于需要做探伤检修等程序[3],中外甚至发生过数起因重着陆导致的机毁人亡的严重事件。着陆过程虽然只有短短数秒,但飞行员注意力需要在仪表和目视之间来回切换,根据实际情况做出及时的判断和准确的调整[4],因此飞机着陆的好坏不仅从驾驶员的操作水平直接体现,还受诸多环境因素如气象条件、机场条件等影响,理想的着陆状态是接地瞬间升力约等于重力,垂直载荷接近1g(g为重力加速度,垂直载荷用重力加速度的倍数表示)。但并不是越轻越好,在某些天气情况下,飞行员反而会主动选择“扎实接地”[5],使着陆看起来很“重”,值得注意的是,着陆重不等于重着陆,前者强调主观感受,后者更加依赖于客观数据。航空公司实际运行中,主要通过实施飞行品质监控(flight operation quality assurance,FOQA)对快速存取数据记录器(quick access recorder, QAR)中的垂直加速度和下降率进行监测,发现“超限事件”,从而判断是否发生重着陆,但飞行员和机务人员普遍认为此种方法效率低,不够严谨,容易造成错判漏判[6]。罗帆等[7]认为解决航空行为人的内在局限性或失误的可能性是提高航空灾害预警的重要途径。因此,对重着陆事件进行全面客观的评判,寻找诱发重着陆的关键致因,有助于承运人开展重着陆预防工作。
现总结中外重着陆研究文献,介绍重着陆的诊断方法、风险评价方法和预测方法;指出当前研究在预测方面存在的不足,针对主要存在的问题,提出重着陆预防研究的展望。
1 重着陆判断
飞机着陆载荷主要由起落架载荷和翼根载荷两部分组成,其中起落架载荷是在机轮接地时地面支持力产生的载荷,翼根载荷超限常出现于飞机的减速下降、拉平阶段,悬挂在机翼上的发动机由于惯性而产生过大的向上加速度。因此着陆载荷不仅与起落架构造有关,还与飞机质量和飞行状态有关。重着陆诊断的根本目的在于发现危害飞机结构安全的事件,因此重着陆的判断还需要考虑及时性和准确性,将事故风险关口前移,为采取措施提供充足时间可有效减少损失。传统超限事件分析都是事后分析,缺乏及时性。蔡坤烨等[8]提出一种飞机重着陆的客户化报文设计方法,通过设置事件的触发逻辑可以帮助机务人员快速发现重着陆事件并指导检修。赵新宇[9]、黄杰[10]针对通用航空飞行品质监控,对超限事件进行识别,通过实时判别飞行阶段,利用高带宽、超高速、低延时的“飞天”地空通信系统,实现了飞行各阶段的实时诊断和告警,但诊断着陆垂直荷载大用到的方法仍然是单参数的阈值判断,忽略了其他参数的影响,因为在着陆载荷没有超限的情况下同样可能会造成机身结构的损坏。因此重着陆诊断需要使用更为综合全面的方法。
1.1 仿真建模
仿真建模法是一种辅助判断重着陆的直接方法,该方法以飞机制造商给出的荷载标准为依据,采用动力学分析的方法判断飞机在着陆时荷载是否超过手册中规定的标准。袁心等[11]建立了在大气扰动环境下飞机起降事故仿真动力学模型,可结合起落架模型的仿真结果和飞行数据记录器(flight data recorder, FDR)对事故调查起辅助作用。Sartor等[12]认为飞机的数据分析一般具有保守性,不能准确评估飞机实际的情况,如飞机的垂直加速度传感器记录频率是8 Hz,但飞机接地瞬间往往小于0.125 s,因而提出建立飞行参数传感器仿真(flight parameter sensor simulation, FPSS)模型,通过贝叶斯灵敏性分析方法改变输入如质量、重心,俯仰角、下降率、轮胎状态等参数,计算出起落架精确值和模拟值之间的误差,使重着陆的判断更为精确。Lee等[13]通过结合多体动力学(multi-body dynamics, MBD)模型和线性仿真代替传统的非线性着陆仿真,将着陆模型转换为飞机刚体模型+起落架轮胎模型的分体式着陆模型,如图1所示,结果表明相比后者,有着更好的计算性能。
但是,仿真建模需要占用大量的计算资源和以海量数据做支撑,而且重着陆常规检修程序复杂耗时,85%的检查却现根本没有损坏[14],存在耗时、效率低等缺点。中国许多学者针对这一问题开展了研究,提出基于机器学习的故障诊断方法,通过分析与重着陆相关的参数,挖掘数据规律,找到重着陆诊断的潜在方法,提高诊断效率的同时避免了FOQA超限监测中人为主观性对重着陆判断的影响。
1.2 机器学习
1.2.1 神经网络
神经网络算法是深度学习的基础,其具有自适应与自组织、泛化能力、非线性映射能力、高度并行性等特点,广泛应用于分类、预测等领域。
曹海鹏等[15]通过讨论飞机的接地姿态和受力分析,选取垂直加速度、下降率、水平加速度、横滚角和俯仰率5个QAR参数作为引起重着陆的主要因素,将其数据作为三层BP(back propagation)神经网络的输入,以表示重着陆严重程度的数字作为输出,如图2所示。用1 000个样本数据参与训练,经检验,该神经网络能判断出单一因素引起或者复合因素引起的重着陆,准确率较高。于健等[16]同样采用BP神经网络,考虑了与飞行员操作相关的两个参数,分别是驾驶杆位置和驾驶盘位置,用100个事件样本数据对着陆垂直载荷大事件进行诊断,经测试在诊断的同时还能识别出飞行员的动作特征,为后续深入的风险分析做了铺垫。郭媛媛等[17]通过统计近30年的灾难性事故样本,得到14种致因和冲出跑道、硬着陆、碰撞3种事故类型,将其分别作为BP神经网络和Elman神经网络的输入和输出,训练出进近着陆阶段事故致因和事故类型的隐含关系,可预测可能出现的事故类型。张帅[18]建立基于飞行品质监控的超限裕度模型,挑选与着陆垂直荷载大相关的5个超限事件裕度值作为BP神经网络输入,经训练该模型能判断着陆垂直荷载大事件是否发生并找出是由哪些超限事件引起的。
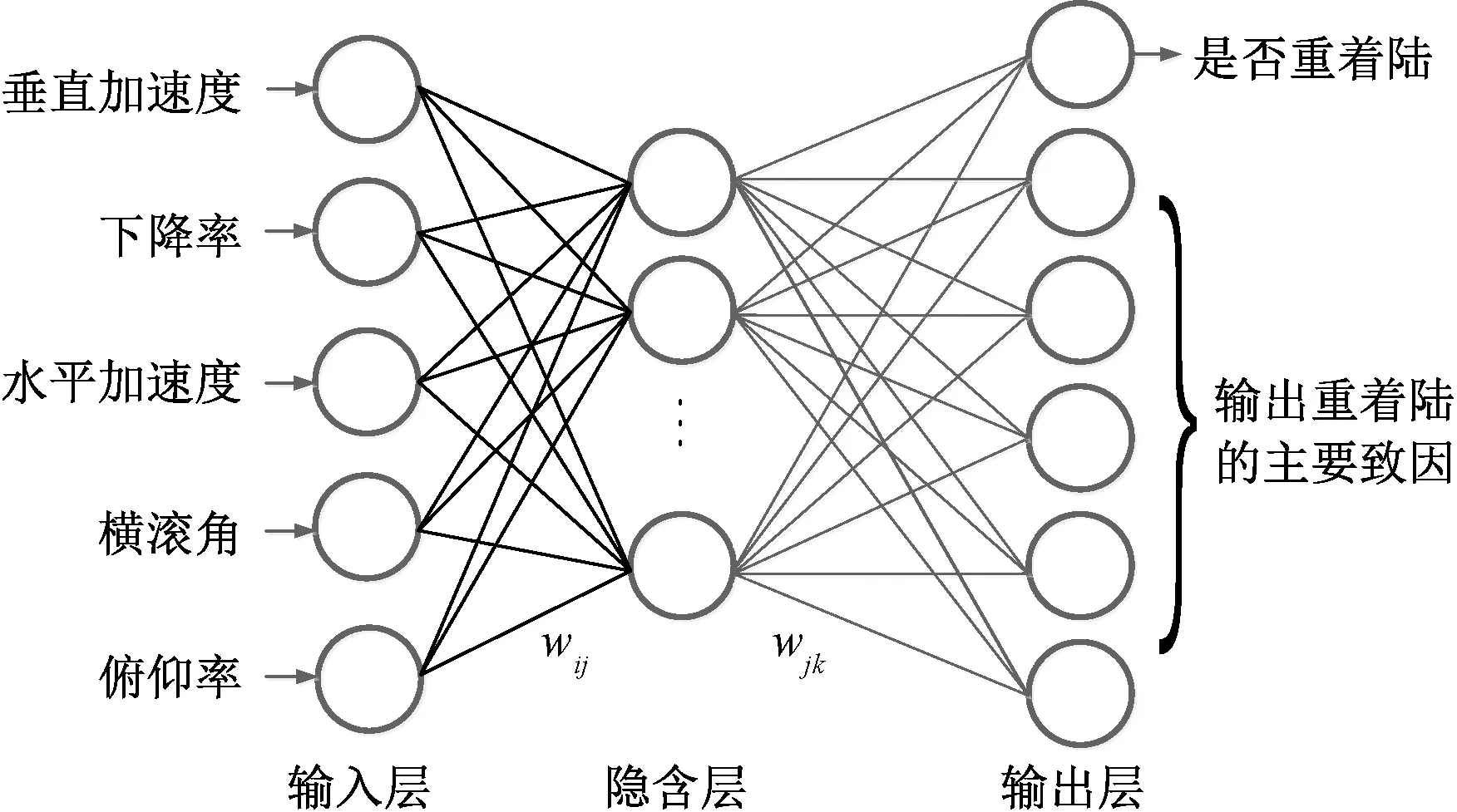
wij和wjk分别为输入层与隐含层和隐含层与输出层的权值
虽然神经网络有着良好的非线性映射能力,但其本身存在的一些缺陷,如过拟合、过训练、学习样本要求高等,而且模型的参数选择也依赖经验技巧,无法保证诊断结果最优。
1.2.2 支持向量机
支持向量机(support vector machine, SVM)广泛应用于模式识别领域,通过设置分类并训练样本数据,寻找最优超平面,达到区分样本的目的。
聂磊[19]提出基于支持向量机SVM的重着陆诊断模型,以飞机着陆受力分析确定的5个风险参数作为训练数据,使用70组样本进行训练,识别率最高高达92.86%。Wang等[20]对比最小二乘支持向量机(least-squares support vector machine, LS-SVM)和反向传播神经网络(back propagation artificial neural network, BP-ANN)方法在重着陆诊断中的应用,前者在训练时间上要显著优于后者,除此之外,支持向量机有需要样本少,诊断精度高的优点。王旭辉等[21]构建的重着陆事件决策系统使用SVM算法在诊断的同时还能给出事件诱因所在。许桂梅等[22-25]在优化支持向量机的诊断中做了较多工作,文献[22-23]使用遗传算法(genetic algorithm, GA)和粒子群算法(particle swarm optimization, PSO)优化LS-SVM中惩罚系数C和核参数σ的选择,提高了分类精度和速度。文献[24-25]通过多种核函数的组合来提高模型精度。贾宝惠等[26]将主起落架缓冲支柱的套筒压缩行程纳入到硬着陆判断因素,使用改进AdaBoost SVM算法优化弱分类器的评价系数权重,有效降低了重着陆识别的漏判误判率。
但是,由于神经网络和SVM的智能方法属于“黑盒”算法,缺乏对模型的解释性,高小霞等[27]提出基于模糊关联分类器(fuzzy associative classifier, FAC)的超限事件诊断方法,将QAR数据通过模糊C均值聚类(fuzzyC-mean algorithm, FCMA)后用Apriori算法挖掘数据之间的规律形成分类规则库,最后由遗传算法优化,试验结果表明,该方法在保证诊断识别率情况下,解释性要优于最小二乘支持向量机。在一些重要深度学习领域,人们不能一味相信机器的结果,因此,在保证识别准确率的前提下增强模型的解释性成为研究新方向。
2 重着陆风险分析
重着陆作为一类风险事件,其发生往往不具有偶然性,海恩法则指出: 每一起严重事故的背后,必然有29次轻微事故和300起未遂先兆以及1 000起事故隐患。着陆阶段的事故类型如擦机尾、着陆跳跃、冲偏出跑道等都和重着陆有着千丝万缕的联系,而且与飞行员的操作水平有着直接的关联,REASON模型很好地说明了事故的致因,如图3所示。识别风险,通过使用风险评价方法,可以为航空公司后续的风险管理提供一定参考建议。风险分析方法在民航安全如跑道超限[28]、可控飞行撞地[29]等有着广泛的应用,目前中外普遍采用定性和定量或者二者相结合的方法。
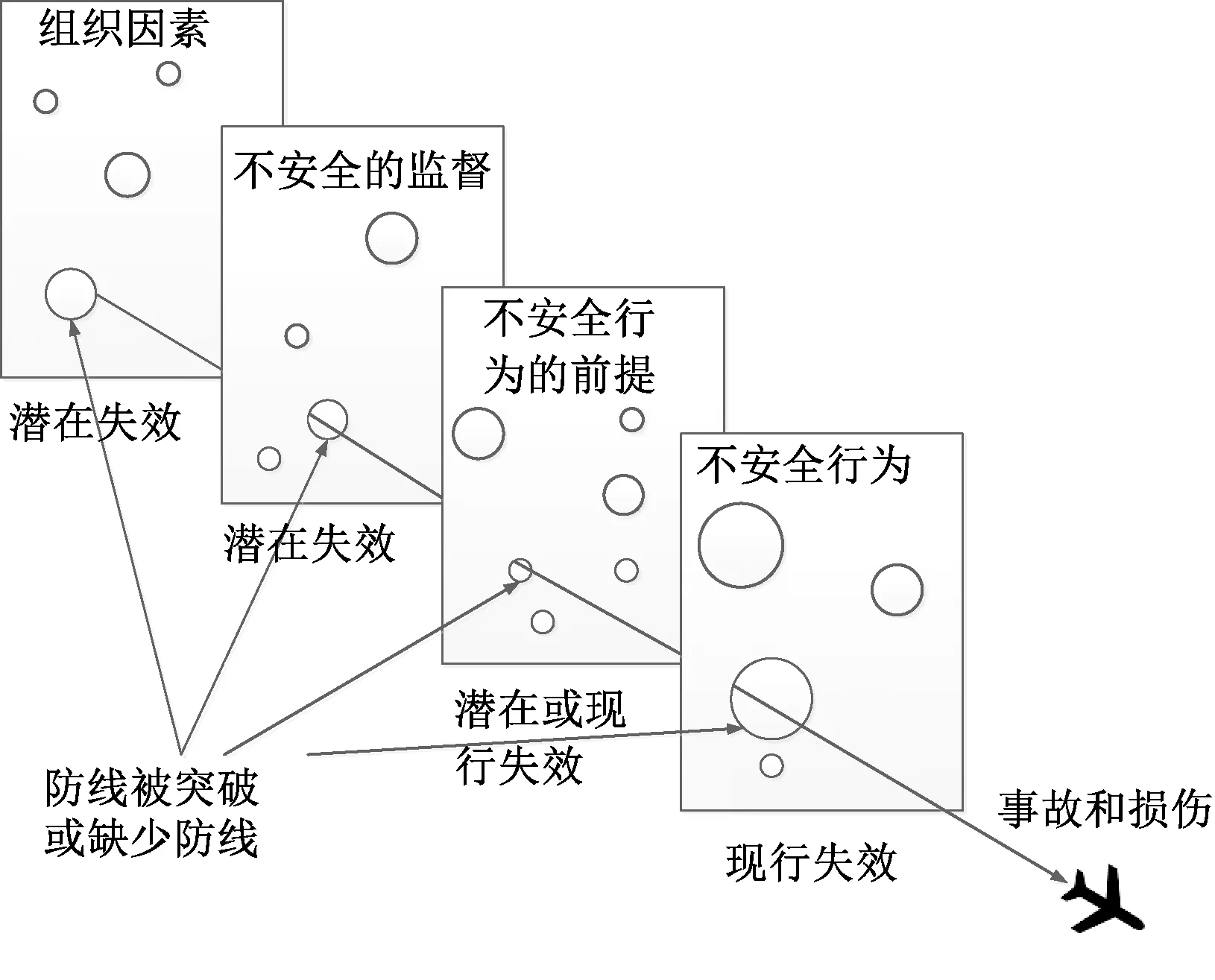
图3 REASON模型
2.1 定量分析法
2.1.1 统计分析
汪磊等[30-33]提出若干基于统计分析的风险评价方法,文献[30]根据大部分QAR数据统计分布呈正态分布特点,选择垂直加速度作为评价指标,用偏离均值μ的距离和程度表示重着陆发生的可能性和严重度,由二者乘积定量表示风险值的大小。文献[31]提出基于QAR数据的曲线相似度方法,用飞行数据曲线的总体趋势、伸缩变量、平移变量3个指标与由数理统计得到的“标准曲线”差异来评价飞行员着陆操作风险的大小。文献[32]提出飞行数据正态云概念,以正态云模型刻画飞行数据的分布,如图4所示。由云模型理论和信息熵概念确定评价指标权重,模糊贴近度方法确定评价指标与风险等级的相似度,有效降低了因不同标准导致的评价偏差。
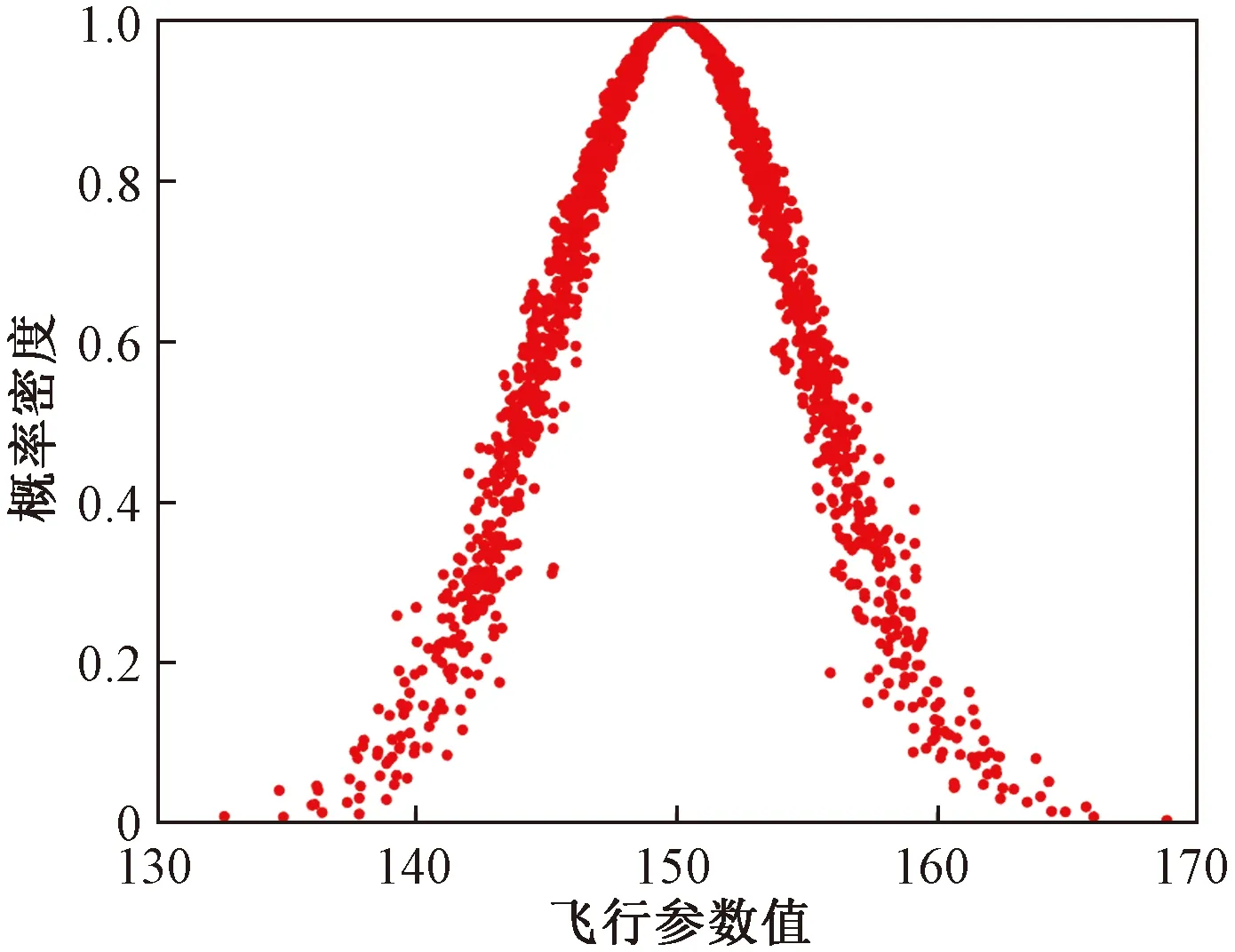
图4 正态云模型[32]
文献[33]选取飞机着陆阶段俯仰角和驾驶杆位移参数为研究对象,使用小波分析方法描述飞行员操作和飞机状态参数在时域和频域之间的相关关系,从而对飞行操作进行分析和评价。祁明亮等[34]提出以黄金分割法划分飞机着陆阶段可能触发超限事件的高风险区域,计算出着陆阶段发生超限的平均概率。赵新斌等[35]根据垂直加速度满足截尾正态分布的特点,划分出风险区间,利用风险极大化思想优化判别重着陆的标准。
2.1.2 权重分析
Wang等[36]采用多元线性模型对重着陆和非重着陆的关键参数进行比较,发现50~0 ft(1 ft=30.48 cm)参数变化较大,飞行员需要时刻注意下降率和地速,逻辑回归模型表明,接地姿态的俯仰角、横滚角和襟翼位置与重着陆密切相关。在此基础上,文献[37]进一步分析了飞行员操纵杆和油门杆配合对飞机长着陆和重着陆的影响。王冉等[38]通过建立飞机进近着陆距离标准模型,利用灰色接近关联分析和灰典型相关分析方法找到影响长着陆和重着陆的关键参数及其相关性。Qian等[39]引入面板数据聚类的社会经济学统计方法,提取并对飞机着陆前10~2 m的关键飞行数据进行统计和聚类,找出重着陆的关键致因。Wang等[40]建立了以FOQA监控标准为指标,以层次分析法(analytic hierarchy process, AHP)确定权重的重着陆风险评估模型。Jasra等[41]采用主成分分析法(principal component analysis, PCA)对在美国境内不同机场运行飞机的飞行参数差异进行了分析。王旭辉[42]根据“人-机-环”风险管理机制建立3层风险因素体系,在层次分析法基础上提出增量式算法,通过增量信息修正风险因素权重可解释随航线运行各风险因素变化情况。汪磊等[43]针对着陆期间飞行员操作驾驶杆、方向舵的控制输入进行分析,以专家打分方式确定权重,应用功率谱分析法评价操纵水平。郭超超等[44]在层次分析法基础上提出飞行品质指数(flight quality index, FQI)概念并以此对航空公司可控飞行撞地风险值进行了定量研究。
2.2 定性分析法
定性分析法是从多个维度分析事件性质的方法。SHELL模型用于分析事件中人、软件、硬件、环境四个要素之间的相互关系,用于重着陆事件可以得到导致重着陆的风险因素[45]。周进[46]、郑薇[47]在SHELL模型基础上用熵权法和优劣距离法(technique for order preference by similarity to an ideal solution, TOPSIS)法对引起重着陆的风险因素排序,找出事件发生的主要原因。赵礼强等[48]以Reason模型为基础,通过采用清晰集定性比较分析法(crisp-set qualitative comparative analysis,CSQCA)研究了45起空难事故,总结出空难事故多因素联动致因。
2.3 综合分析法
刘俊杰等[49]以人、机、环、管4方面改进Bow-tie模型,通过数量统计的方式突出风险管控重点。王晴昊等[50]使用系统理论过程分析方法(system theore-tic process analysis, STPA)将飞机进近着陆阶段不安全事件视为控制问题,认为不安全事件是由不正确的控制过程导致的,结合飞机进近着陆运动学方程,分析飞机进近着陆阶段高度和距离的关系,给出飞机的速度和下滑角在一定范围内才能保证安全接地的条件。陈农田等[51]以新舟600机型为例,使用层次分析法分解标准操作程序并确定了进近着陆阶段对安全性有重大影响的关键操作行为,为实施飞行员进近着陆操纵行为风险分析奠定基础;使用灰色白化权聚类方法建立了用于评价飞行员进近着陆品质的重要指标[52]。刘柳[53]用变量相似度聚类和专家经验实现参数约简,定义并量化了着陆阶段的风险情景,用bowtie模型对风险情景定性分析出风险与不安全事件的逻辑关系,以此确定贝叶斯网络的节点和结构,在确定事件的情况下通过反向推理得到事件致因的后验概率。
3 重着陆预测
将事故风险前移,为采取措施提供充足时间可有效减少损失。传统超限事件分析都是事后分析,缺乏及时性,指导意义不大。目前重着陆预测主要从三个方面展开:风险、数量、参数。
3.1 事故风险预测
飞行品质监控通过设定监控标准来识别超限事件,但都是基于触发逻辑的方式,容易存在虚发和漏发警报情况。孙瑞山等[54]采用过程控制方法,将风险告警关口前移,并利用3σ原则确定控制限,基于ISO8258:1991即国标GB/T 4091—2001异常监测准则修正垂直加速度数据的判定准则,使其能提前预测超限风险大小。常文兵等[55]截取着陆阶段数据,用支持向量机训练5个影响参数随机组合下的预测模型,在少量变量的情况下有较好的预测精度。文献[53]也通过贝叶斯网络计算出当发生特定风险情景时导致事件发生的可能性大小。郑磊等[56]采用动态事件规整(dynamic time warping, DTW)方法将飞行时间序列聚类分析出飞行操纵模式,利用卷积神经网络做分类训练,在已知飞行员操作模式的情况下,能表现出较好的重着陆的预测准确率和召回率。陈思等[57-58]利用基于自适应变异粒子群方法(adaptive mutation particle swarm optimizer, AMPSO)改进的支持向量机将预测准确率从80.747%提高至96.340 5%,效果显著。结合预警参数的实时监控,从而实现重着陆的风险预警。汪磊等[59]使用蒙特卡洛模拟方法对参数进行扩充再根据概率统计预测了飞机着陆擦机尾风险,该方法同样适用于重着陆的风险预测。Ding等[61]通过对比分析不同算法在重着陆预测中的效果,发现基于K最邻近分类器的梯度增强决策树(gradient boosting decision tree, GBDT)模型表现最优,且基于数据驱动的模型要由于基于知识驱动的模型。
3.2 事故数量预测
通过预测超限事件发生的数量从而揭示事故发生趋势,可以为航空公司掌握运行质量,提高安全水平并及时做出预防措施提供参考依据。
文献[47,60]使用BP神经网络对航空公司重着陆事故数量做了预测。许桂梅等[62]利用遗传算法优化的最小二乘支持向量机对某航空公司重着陆超限事件进行了预测研究,其短期预测和长期预测均表现出较好的预测精度。陈农田等[63]使用灰色马尔科夫模型预测了进近着陆不安全事件数量。但是事故数量预测并不能从根本上杜绝重着陆的发生,只是单纯反映数字发展趋势,不能揭示事故发展规律。因此需要从飞行参数入手,探讨重着陆发生的一般规律。
3.3 参数预测
由于QAR数据的记录特点,飞行参数是一种典型的多元时间序列,记为X,X=(X1,…,Xi,…,Xm),Xi=(x1i,…,xji,…,xni)(i=1,2,…,m;j=1,2,…n;n,m∈N),其中Xi表示第i时刻的观测序列,n表示观测序列的长度,m表示记录参数的个数。X用矩阵形式可表示为
(1)
将式(1)在三维空间中绘制如图5所示。
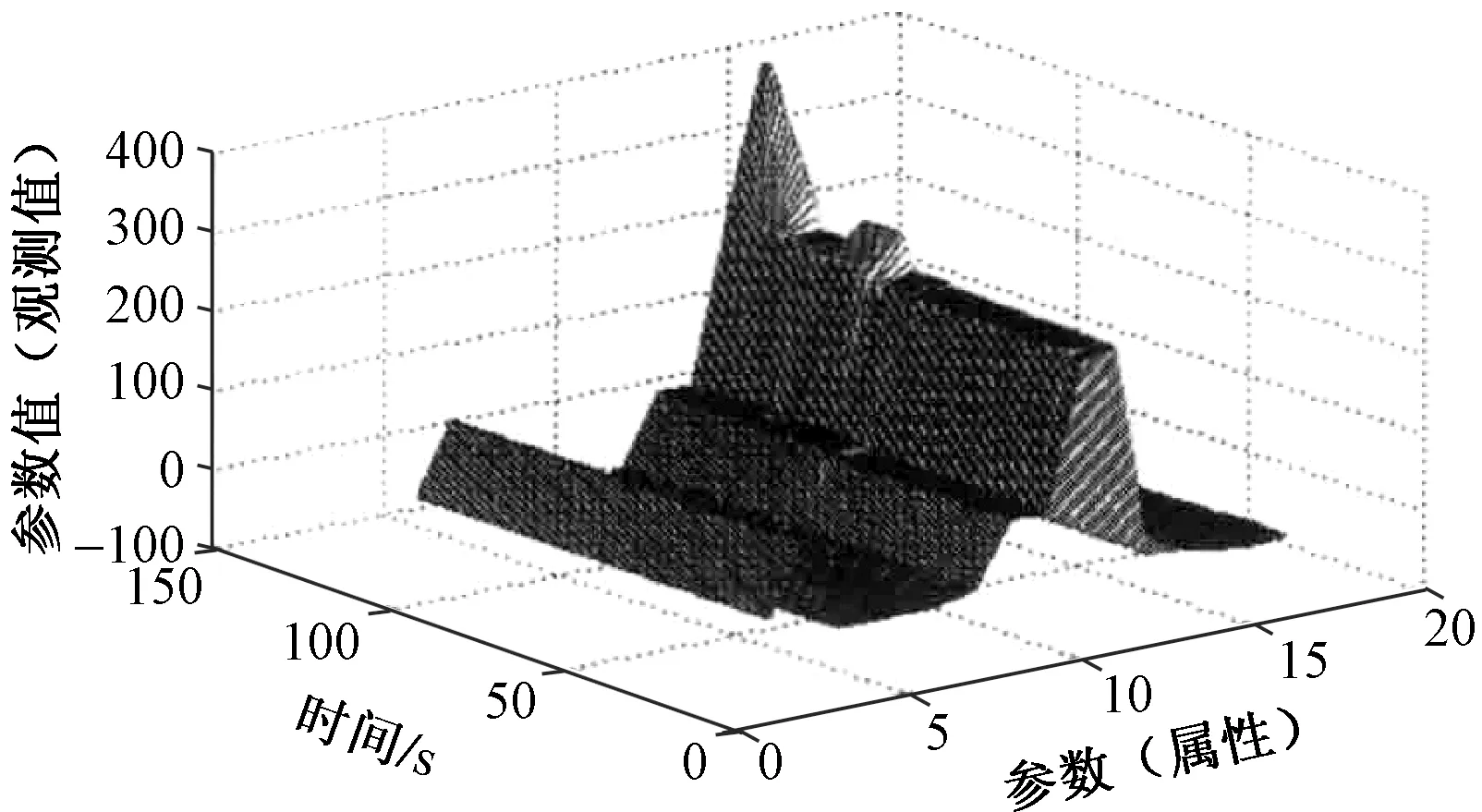
图5 多元飞行数据时间序列三维图[64]
通过机器学习、时间序列分析等方法对飞行参数进行预测,提前预知飞机飞行状态,从而保证飞机运行在安全的包线内。
Hu等[65]将9~2 m飞行高度范围内以每0.5 m切片的7个飞行参数进行相关性分析降维到3个以优化SVM输入参数,使重着陆预测精度由46.78%提高到52.74%。Qiao等[66]在飞行数据切片基础上建立径向基(radial basis function, RBF)神经网络的预测模型,该模型采用K均值聚类算法确定模型参数,预测精度由BP神经网络的66.52%提高到72.27%。巴塔西等[67]使用曲线拟合方法和自回归滑动平均模型(autoregressive moving average mo-del, ARMA)模型对飞行参数时间序列进行了预测。将连续航班的着陆载荷看成是一个随机过程,王旭辉等[68]用模糊加权Markov方法对着陆载荷进行状态预测,并根据预测的载荷序列来划分重着陆等级,达到风险控制的目的。传统循环神经网络(recurrent neural network, RNN)神经网络算法存在梯度消失问题,BP神经网络结构简单,不能充分挖掘数据,支持向量机SVM又由于没有考虑时序特征,因此在预测飞行参数上不够精确。Tong等[69]引入长短时记忆网络(long short-term memory, LSTM)对飞机着陆垂直荷载时间序列进行预测,由于LSTM可记忆时间序列长期依赖关系,相比于SVM的预测方法,使均方误差(mean square error, MSE)能达到10-4。Zhang等[70]同时比较了LSTM与SVM模型、BP模型、逻辑回归(logistic regression, LR)模型在重着陆预测方面的能力,结果表明,LSTM在精度和召回值都保持较高水平。Geoffrey等[71]通过建立基于机器学习的多层神经网络预测模型,利用起落架接地实验数据如减震器参数、轮胎参数和速度参数预测起落架的荷载。Jeong等[72]建立MBD模型,输入飞行参数,通过Levenberg-Marquardt反向传播算法训练ANN神经网络,能准确估算出起落架应变和着陆产生的载荷。由于着陆阶段人机环影响错综复杂,Lu等[73]采用自回归的方式对飞机着陆模型(aircraft landing model, ALM)着陆阶段各变量序列进行预训练,使用预训练的飞机着陆模型能使LSTM预测精度显著提高。各预测方法对比如表1所示。
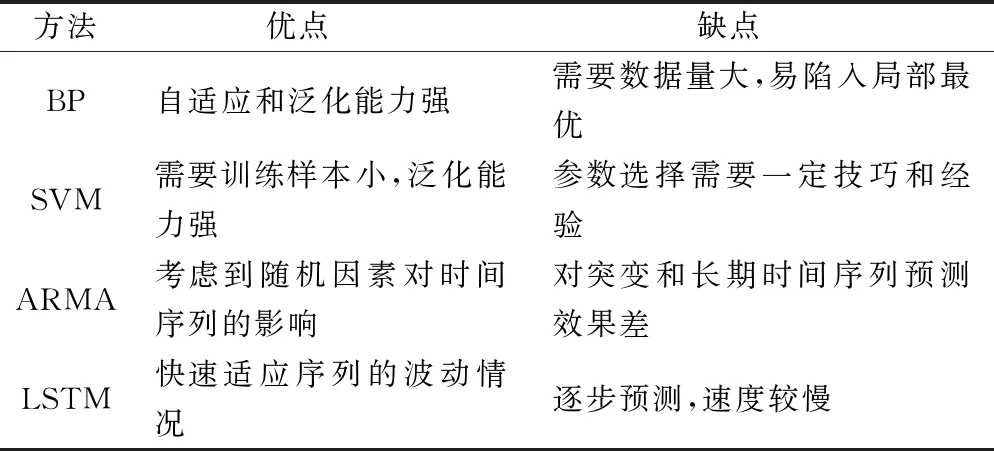
表1 预测方法对比
4 控制策略
为避免重着陆,需要飞行员操作和飞机系统工程的共同努力。飞机系统主要是通过分析系统控制问题从而优化飞机在着陆过程中的可操作性。李晓明[74]建立了以飞机状态、飞行员操作为输入,飞机姿态变化为输出的静态预测模型,在此基础上结合(proportion integral differential, PID)控制模型用BP神经网络对QAR时间序列进行动态预测,实现对飞行姿态的在线调节。虽然PID控制简单易实施,但鲁棒性较差[75]。考虑到飞机在着陆时容易受到地面效应影响,从而影响飞机的操纵性,Lan等[76]研究了飞机在强风着陆过程中的稳定控制问题,建立模糊逻辑动态模型,提出基于方向舵和副翼的抑制和控制策略。
随着飞机自动化水平的提高,飞机在绝大部分时间都可以使用自动驾驶程序,并具备特定条件下的自动着陆功能[77],飞行员的意义更多体现在如何处置突发情况并做出正确判断上,由于飞行员是执行飞行任务的核心控制人员,约束并发现飞行员的不安全行为,在一定程度上能防止事故的发生。通过飞行员安全绩效评价,实现对飞行员全场景全时段的操作品质量化,为航空公司制定安全战略提供可靠依据。
5 结论和展望
通过对民航运行飞机重着陆四个方面的总结研究,得到以下结论和展望:
(1)重着陆诊断方面,基于多参数的机器学习方法只需要在诊断模型中输入目标航班的相应QAR数据,调节模型参数,经过训练便能输出诊断结果是否重着陆和导致重着陆的主要飞行参数,该方法数据来源广泛,简单易操作,适用范围广,能大大降低人为主观性对事件定性判断的影响。通过改进算法,优化模型参数选取等方法可提升诊断准确率和效率,但在现有算法得基础上效果提升并不显著且由于深度学习等智能算法的内在局限性对诊断结果也缺乏解释性。因此,未来可以建立基于多元数据的着陆仿真模型对重着陆进行监测,通过综合飞机参数数据、飞行运行数据、机场环境数据等信息实现对飞机的仿真模拟和场景回放,对重着陆事件进行精确识别,相比于神经网络的算法识别过程,建模仿真对识别结果有着更好的可解释性,但大数据的耦合问题和时间成本过长问题也对建模过程提出了更高的要求和挑战。
(2)重着陆风险分析方面,现有研究大多基于航空公司的飞行手册、标准操作程序、飞行品质监控体系,结合基于概率的统计学分析法和基于事件的人因模型方法,从定性和定量两方面对重着陆进行风险识别、风险分类和风险评估,但风险的量化缺乏统一的标准,包括指标的选取和权重的确定过程,仍然需要凭借主观经验,结论中指出的风险致因如粗猛带杆、收油门过早、拉平过早等定性描述或建议对飞行员的实际指导意义有限。未来可以通过建立并完善飞行员技能全生命周期的管理体系,统一飞行员操作量化和评价标准,改进和提升飞行员着陆操纵水平,实现对飞行着陆风险的源头管控,增强飞机安全接地的“软实力”。
(3)重着陆预测方面,一方面将航空公司连续航班的着陆载荷作为随机序列进行预测,可以得到未来一段时间内航空公司发生重着陆事件数量和概率,为承运人了解运行风险,及时采取行动提供参考;另一方面将飞行参数作为时间序列,利用人工智能算法对数据序列自身进行预测,得到飞机在未来短时间内的飞行数据,从而达到提前预测和告警的目的,但对接地时刻参数突变的趋势预测能力较弱,实用价值较低。未来,除了改进算法提高预测适用能力以外,还可以结合飞行控制系统开发可靠的自动着陆系统,将预测的数据用于系统输入,从而调整飞机的着陆姿态、推力,速度在控制范围内,但对飞机和机场的导航设施、传感器、计算系统设计等有较高要求。
猜你喜欢
环球时报(2022-05-30)2022-05-30
现代电力(2022年2期)2022-05-23
小哥白尼(军事科学)(2021年7期)2021-11-20
军事文摘(2021年19期)2021-10-10
电子制作(2019年19期)2019-11-23
当代陕西(2019年11期)2019-06-24
意林·全彩Color(2019年4期)2019-05-11
电子制作(2019年24期)2019-02-23
儿童故事画报·发现号趣味百科(2017年4期)2017-06-30
作文周刊·小学一年级版(2017年9期)2017-06-20
