
集成行波测距功能的高压输电线路保护装置的技术探讨
2021-11-19 08:55薛明军韩志勇陈福锋胡俊彦
四川电力技术 2021年5期
邹 磊,薛明军,龙 琳,韩志勇,王 胜,陈福锋,张 祥,胡俊彦
(1.国电南京自动化股份有限公司,江苏 南京 211100;2.南京国电南自电网自动化有限公司,江苏 南京 211100;3.国网北京市电力公司,北京 100124)
0 引 言
目前,绝大多数变电站输电线路故障测距主要依赖于线路保护装置和故障录波器装置的测距功能模块。比较典型的测距原理包括单端测距和双端测距。单端测距一般采用阻抗法,利用测量故障回路正序阻抗的电抗分量与线路全长的电抗分量进行比较。双端测距则是构建序网络图,通过计算两侧到故障点的电压建立方程来计算故障距离。上述两种工频量测距原理对于输电线路的高阻故障、弱馈运行方式及带互感的同杆双回线路方式下发生复杂的跨线故障均不适用,测距精度也会受影响。这也是现有工频量测距原理的一个瓶颈。
目前,基于行波的测距原理已经日趋成熟。行波测距具有不受过渡电阻、CT饱和、零序互感、运行方式、系统振荡影响的优势,可以精确定位线路故障点,大大减少巡线的工作量,缩短故障修复时间,提高供电可靠性,且已经有非常成熟的行波测距装置进入了工程应用。当前变电站中每条输电线路除了配置线路保护装置以外,还需额外配置一套行波测距装置,当变电站的出线较多时,则需要配置多套行波测距装置;但是采取单独配置行波测距装置的模式浪费了变电站的占地面积。如果将行波测距功能集成到输电线路保护装置中,以上的问题就迎刃而解,每条线路无需配置额外的行波测距装置即可实现故障的精确定位。
下面以集成行波测距功能的高压线路保护装置为目标,提出了装置的整体硬件架构方案和行波测距功能的总体实现方案,将行波测距功能与保护功能的完美融合,为提高输电线路保护装置的测距性能提供了技术保证。
1 集成行波测距功能的理念
以现有高压输电线路保护装置为蓝本,将行波测距功能集成到高压输电线路保护装置中去,目标为:行波测距功能与保护功能相对独立,行波测距功能宜单独配置插件,实现该功能的即插即用,行波测距软硬件不影响任何保护功能;行波测距功能异常后应有相应的告警报文,并驱动装置的告警接点。
集成行波测距功能的高压输电线路保护装置,如应用到现场或现场改造更换时,为了保持现有用户的使用习惯,其二次回路与常规的输电线路保护装置的二次回路应完全一致。特别是行波测距所用的二次侧信号应与线路保护功能共用,即一次系统无需为行波测距功能单独配置PT/CT二次回路。
为了保证高频行波信号的可靠获取,互感器需要采用宽频带,同时还需要保证暂态特性对保护没有影响。利用现有保护装置上的保护互感器来获取行波,具有简单、易于实现的优点,不需要额外投资。
目前行波测距主要采用单端测距和双端测距两种原理,由于单端测距原理不可靠,因此不采用;双端行波测距则需要专用通道。高压输电线路保护装置都配置有与对侧线路保护进行通信的独立光纤通道,因此集成装置的行波站间通信可直接借助线路保护现有的光纤通道,不用另设通道。同时行波站间通信功能不会影响到线路保护的站间通信功能。
集成行波测距功能的输电线路保护,将保护功能与行波测距功能相互融合,在提升了行波测距可靠性的基础上,也利用行波测距功能校验了保护功能的正确性。
2 装置的总体设计思路
2.1 总体架构
装置设计的整体思路是:在现有高压输电线路保护装置的基础之上集成行波测距功能,集成装置的整体硬件结构如图1所示。

图1 集成行波测距装置的总体架构
现有高压输电线路保护装置的架构为双中央处理器(central processing unit,CPU)模式。主CPU负责故障处理、逻辑运算和跳闸流程,而从CPU仅负责启动判断,用于开放IO板的跳闸继电器的负电源。同时还配置了一块人机对话微控制单元(micro control unit,MCU),主要用于液晶面板显示和监控后台的信息交互。三者通过装置内部的高级数据链路控制(high level data link control,HDLC)总线的方式进行通信。集成装置在现有模件和架构都不变化的基础之上增加了一块超高速行波CPU板。行波CPU板主要负责捕获初始行波浪涌到达本侧的绝对时刻。行波CPU通过装置母板的内部总线与保护主CPU进行信息的交互,同时保护主CPU还将保护的启动信号通过母板以开入的方式传递给行波CPU。
现有的行波测距装置的设计架构为行波CPU板与工控机的组合模式。行波CPU的核心是负责捕捉故障波头绝对时刻,工控机则负责获取两侧行波波头绝对时刻并完成行波测距算法。对于集成装置来说,保护主CPU能够通过装置内部总线获取故障到达本侧的波头时刻,同时还可以通过光纤通道交换两端所记录的初始行波到达时间。因此集成装置保护主CPU则可以扮演工控机的角色,来完成最后的双端行波测距算法。
2.2 行波CPU插件及接口设计
行波CPU的工作回路如图2所示。行波测距的互感器采集模拟量信号进入行波CPU后分为2路:一路为带通滤波器,主要提取频带为3~10 kHz左右的高频信号,用作行波CPU启动用;一路为低通滤波器,其截止频率为300 kHz,经高速采样回路用于故障高频信号波头的提取。

图2 行波CPU工作回路
行波CPU设置启动回路的目的是缓解行波CPU的工作压力,同保护的启动目的一样,只有当行波CPU启动之后,才投入小波变换算法捕捉波头的相应算法。硬件启动门槛设计主要考虑在故障时候有足够的启动灵敏度,而在外接干扰产生白噪声的情况下不误启动。
行波CPU正常运行时候,两个回路并行工作,高速采样回路实时采样,采样频率为1 MHz,并将8 ms之前的历史值进行缓存,循环更新;当检测到硬件启动回路满足启动后,将启动之前8 ms的采样数据进行保存,并继续缓存启动之后8 ms的采样数据;当缓存满足之后,对启动前后64 μs共128点的采样数据进行小波变换,以确定故障波头的绝对时标。
行波CPU插件通过内部总线与保护主CPU进行通信,两者交互的数据如图3所示。其中行波CPU为客户端,主CPU为服务器端,每次数据处理过程结束后,行波CPU主动上送数据。

图3 保护主CPU与行波CPU信息交互
1)心跳报文:保护主CPU通过心跳报文监视行波CPU的运行工况,实时获取行波CPU的工作状态,当行波CPU处于异常状态时则会触发相应的告警事件和告警节点。
2)绝对时标:当行波CPU启动并捕捉到故障的绝对时刻之后,立即将绝对时间以时标的帧格式发送给保护主CPU;保护主CPU获取到绝对时标报文之后会给行波CPU回应一帧确认信息。
3)录波数据:为了便于故障分析,行波CPU会记录故障前后8 ms的故障数据,并将其记录的原始数据及小波变换值以分帧的方式传送给保护CPU,保护CPU再传送到人机对话MCU生成标准的Comtrade格式录波文件。
由于故障时,考虑到主CPU需要投入更多资源进行故障处理流程,因此将主CPU与行波CPU通信任务维持在一个中级优先级的水平。
2.3 双端行波测距算法设计
双端行波测距需要检测故障点初始行波到达两端的准确时间,同时还需要两侧进行故障初始行波到达绝对时刻的信息交互。目前的超高压输电线路保护装置均配置了光纤通道,通过光纤通道与对侧线路保护装置进行数据的交换来构建全线速动的主保护功能,而主CPU则可以通过光纤通道来完成两侧故障到达绝对时刻的传递。行波CPU与保护CPU两者间则通过集成装置的母板上设置的HSB总线来进行信息的传递,如图4所示。
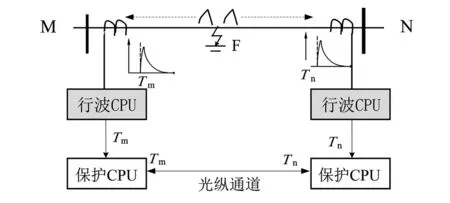
图4 线路两侧保护CPU与行波CPU交互
行波测距需要准确捕捉故障到达的绝对时刻,该时刻的准确性对测距计算的准确性影响很大,因此需要对行波CPU进行精确对时。对时精度须达到1 μs(假定行波波速度等于光速,则1 μs对应的测距误差为150 m),行波CPU支持电B码对时。
本侧时标的获取:行波CPU自身满足启动之后进行故障波头的绝对时刻提取,当感受到主CPU的启动信号之后,通过总线将该时标传递给主CPU。
对侧时标的获取:通过主CPU的光纵通道获取对侧传递的绝对时标。
行波CPU上送时标和本/对侧传递时标的格式均取标准协调世界时(coordinated universal time,UTC)格式。UTC时标分为2个4字节传递,前面4个字节表示为年月日时分秒,后面4个字节表示为微秒。
当线路上发生故障后,行波CPU与保护CPU均会启动。保护CPU启动开放出口继电器的负电源,只有保护CPU动作后,才将行波CPU的测距结果以事件的方式上送到保护装置液晶面板。当线路CPU通过HSB总线和光纤通道分别获取到本侧、对侧时标之后则进入双端行波测距流程。
以M和N分别表示线路两侧,以M和N分别表示线路两侧,双端行波测距算法具体的测距公式为
式中:DMF为距离M侧的故障距离;TM、TN分别为M侧、N侧行波CPU测得的行波波头绝对时间;L为线路全长;v1为行波波速度。
双端测距流程图如图5所示。

图5 集成装置双端行波测距流程
3 集成装置的性能优化
集成装置将行波测距功能与保护功能两者进行融合,既能有效提升行波测距可靠性,同时可较大程度优化保护性能。
对于断路器操作和不造成故障的雷击,如果仅利用行波启动元件作为故障判别元件,将会造成行波误启动和误测距,而集成行波测距装置通过以下两方面来提高行波测距的可靠性。
1)利用保护工频量启动开放行波波头提取功能。将工频电流突变量作为另一个启动元件,与行波启动元件构成与逻辑。行波CPU可以通过母板获取主CPU的硬启动信号,只有两个启动元件均启动之后,才投入小波变换提取故障波头的算法。行波装置启动与电流突变量启动相结合能可靠躲过雷电波导致的误启动。
2)利用工频量保护的动作信号开放行波测距结果输出功能。只有保护跳闸之后,保护CPU才输出双端行波测距结果,否则仅是装置内部记录测距结果,并根据需要进行调阅。
利用双端行波测距来校验线路保护的动作行为,能够精确定位故障点,故障测距精度能够达到1 km以内。对于300 km以上的线路,在暂态超越不超过5%,即15 km的情况下,行波测距裕度远大于阻抗的误差范围,完全可以利用行波CPU对距离I段进行暂态超越校验。
4 试验验证
按照图6所示集成装置双端测试连接示意图搭建好试验平台。
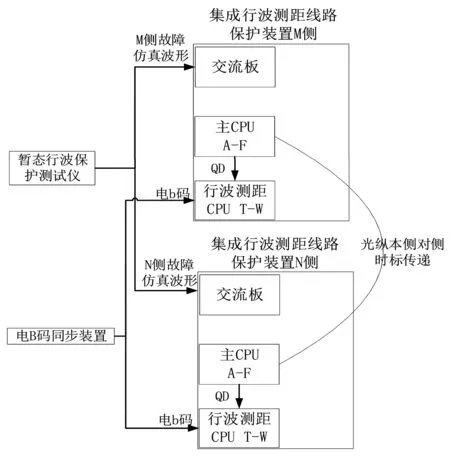
图6 集成装置双端行波测距连接
控制暂态行波保护测试仪模拟输出故障波形,保护CPU与行波CPU检测到故障后启动,行波CPU对启动前后采样数据进行小波变换确定波头绝对时标后,主动上送波头UTC格式时标以及行波数据,主CPU接收到本侧波头时标后,再利用光纤通道获取到对侧波头时标,然后根据行波波速度以及本对侧绝对时标信息,完成测距结果计算。同时集成装置再根据保护动作情况来完成双端行波测距结果的输出显示。
以一条220 kV线路为例,线路全长200 km,实验模拟单相接地、相间短路、相间接地短路、三相短路等故障类型,验证不同故障位置、不同接地电阻情况下装置的测距性能,为增加测距结果的准确性,每种故障类型进行3次试验,并分别记录测距结果,部分实验数据如表1所示,表中:相对误差 =绝对误差/线路全长。
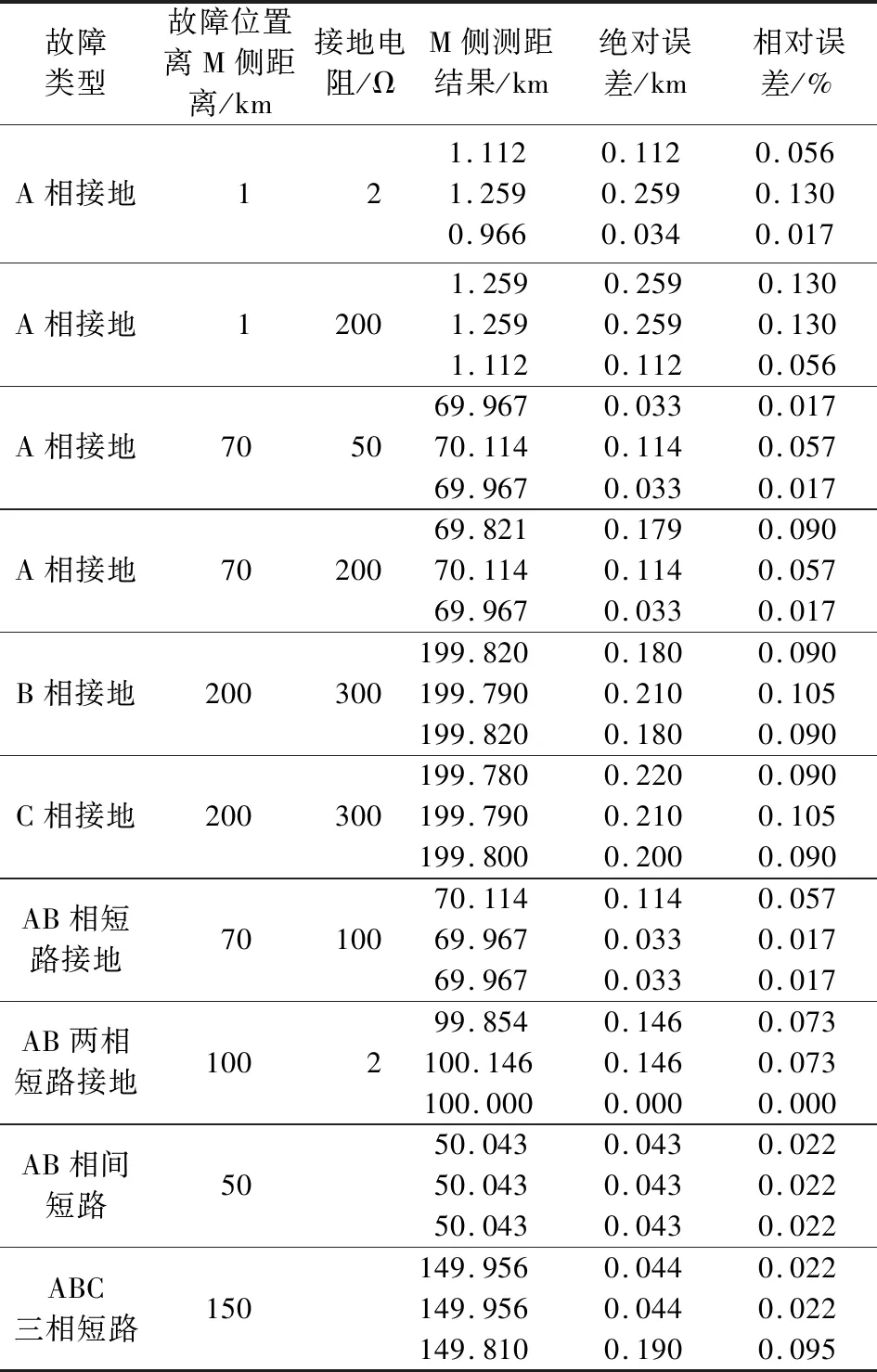
表1 仿真测试结果
表1实验数据表明,不同故障类型、不同故障位置、不同接地电阻情况下,装置测距误差最大值均不超过0.5 km,测试结果满足预期精度要求。
5 结 论
上面提出将行波测距功能与输电线路保护装置融为一体,大大优化了变电站的资源配置,提高变电站投资的经济效益。
该集成装置解决了现有依赖输电线路保护装置的工频测距算法受诸多因素的影响而导致测距精度误差较大的困难,而行波测距算法能适用于各种工况下的各种故障类型,且测距精度高。集成了行波测距的线路保护装置可以精确定位线路故障点,大大减少人工巡线的工作量,缩短了故障修复时间,提高供电可靠性。
猜你喜欢
数学物理学报(2022年5期)2022-10-09
数学物理学报(2022年5期)2022-10-09
电气技术(2022年8期)2022-08-20
导航定位学报(2022年4期)2022-08-15
能源工程(2021年2期)2021-07-21
有色设备(2021年4期)2021-03-16
科学(2020年3期)2020-01-06
电子制作(2019年24期)2019-02-23
汽车电器(2018年1期)2018-06-05
上海师范大学学报·自然科学版(2018年3期)2018-05-14
