
点光源环境下室内环境灯光多参量控制仿真
2021-11-18 05:03:44李朝献
计算机仿真 2021年1期
李朝献
(河南大学濮阳工学院,河南 濮阳 457000)
1 引言
随着人工智能控制技术的发展,采用智能控制技术进行点光源环境下室内环境灯光的优化控制,可以降低灯光的能量开销,提高室内环境灯光的随动性和光强的自动选择能力,增强融合性[1]。研究点光源环境下室内环境灯光的优化控制方法,在室内环境装饰以及绿色环保设计方面有很好的应用价值,同时在促进节能环保设计和室内灯饰环境优化等方面具有重要意义[2]。相关的点光源环境下室内环境灯光控制技术研究受到人们的极大重视[3]。
传统方法中,对点光源环境下室内环境灯光控制主要有模糊控制方法、积分控制方法和反演控制法,文献[4]提出的基于模糊自适应调度的室内环境灯光多参量控制方法,采用模糊自适应调度方法进行室内环境灯光的多线程调度,实现控制优化,但该方法在进行大规模的灯光控制时,控制模糊度较大;文献[5]提出一种基于Smith结构的点光源环境下室内环境灯光多参量控制方法,引入DC/AC逆变器,完成控制器的优化设计。文献[6]提出基于反演积分控制的点光源环境下室内环境灯光多参量控制方法,构建点光源环境下室内环境灯光的分层子维空间规划模型,结合光线的强度信息融合方法进行模糊控制,但该方法的设计难度较大,控制的时效性不好。
针对上述问题,本文提出基于模糊PID的点光源环境下室内环境灯光多参量控制方法。采用多自由度耦合调节方式,进行室内环境灯光亮度和角度的自动调节;结合模糊PID控制方法,进行室内环境灯光的亮度信息和光源输出信息的融合处理;构建模糊PID控制律,进行点光源环境下室内环境的光束轨迹跟踪控制,实现对室内环境灯光的多参量控制优化。
2 约束参量及自适应学习
2.1 室内环境灯光控制约束参量模型
点光源是理想化为质点点光源。在室内环境的组成元素中,光、介质以及光束传输空间均是关键因素。室内环境中的介质可划分为两类,主要为实体介质和虚体介质。实体介质是指采用自身所具备的物理特性对光束进行衍射和吸收;虚体介质是描述光束穿透虚体介质时,即可生成相应的散射现象。
为了实现对点光源环境下室内环境灯光的多参量控制,构建室内环境灯光的分层子维空间分布模型。结合灯光的照明参量规划方法,进行点光源环境下室内环境灯光的7自由度照明空间规划,实现多参量融合特征分析。在点光源环境下室内环境灯光的照明控制中,给定室内环境灯光的分层子维空间分布模型

(1)
式中,θ为灯光的射线以铅锤线的夹角,Ts为点光源环境下室内环境灯光照明的输出时间间隔,tH为照明的多参量融合特征矩,M(θ)表示点光源发光强度分布系数,表示点光源漫射分布系数,G(θ)表示距离照度。
为了提高点光源环境下室内环境灯光照明的随动性,降低污染,采用模糊PID控制方法[7],进行光源环境下室内环境灯光照明的多参量调节控制,内容为

(2)


(3)


(4)

M=Mn+ΔM
(5)

(6)


(7)
其中,u(t)表示波束衍射特征参量,ρ(t)表示多参量约束阈值:

(8)
其中,d(t)表示间接照明凹凸比例。
综上分析,实现对点光源环境下室内环境灯光多参量控制的约束特征分析,根据控制约束参量分析结果进行多传感器融合跟踪识别,提高灯光多参量控制的自适应性[9]。
2.2 点光源的动态基元自适应学习


(9)
在点光源环境下室内环境灯光的角度和强度控制中,采用联合参数估计方法,进行灯光的误差联合控制,得到基元参数调节的误差为:

(10)
在不考虑扰动的条件下,采用图1所示的模糊PID神经网络控制系统,进行点光源环境下室内环境灯光的基元参数学习。
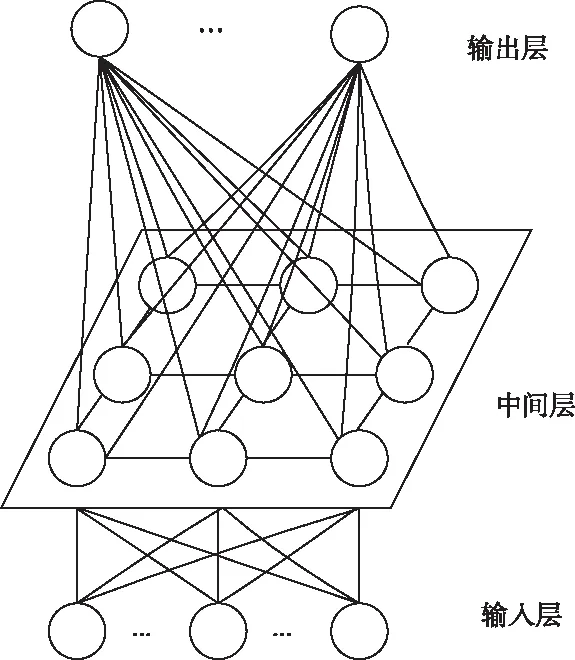
图1 模糊PID神经网络控制器
图1中,输入点光源环境下室内环境灯光传感信息采样值为

(11)

根据上述分析,可以采用多自由度耦合调节方式,进行室内环境灯光亮度和角度的自动调节。
3 室内环境灯光多参量控制优化
3.1 模糊PID控制及环境灯光信息融合处理
在上述构建的室内环境灯光控制的约束参量模型中,采用多自由度耦合调节方式,进行室内环境灯光的亮度和角度的自动调节,并提出基于模糊PID的点光源环境下室内环境灯光多参量控制优化方法[10]。采用模糊PID控制方法进行室内环境灯光的亮度信息和光源输出信息的融合处理,PID控制为

(12)
其中,ce2表示点光源发光强度与垂直方向的发光面的面积之比。
假设,室内环境灯光PID控制的神经元隐含层的输出光束特征量为x1,…,xn,分别乘上权重值w1j,…,wnj,得到室内环境灯光的亮度调节优化解输出

(13)


(14)
其中,β0是绕y轴的点光源环境下室内环境灯光衍射波束的旋转角,其旋转矩阵Ry(β0)表示为

(15)
其中,cβ0、sβ0、-sβ0、cβ0表示矩阵元素。
结合模糊PID控制律,进行点光源环境下室内环境灯光信息融合处理,可以提高多参量融合调度能力与控制效果。
3.2 多参量联合控制优化
构建模糊PID控制律,进行点光源环境下室内环境的光束轨迹跟踪控制,实现对室内环境灯光的颜色、光强、照射角度、波束衍射特征等参量的多参量融合调节,点光源环境下室内环境灯光调节的旋转矩阵Rx(γ0)表示为

(16)
在分布式环境中,以坐标系Σe(≡Σ7)为惯性坐标系,采用光程轨迹跟随控制方法,构建点光源环境下室内环灯光控制的次变换矩阵IT7(θ)
IT7(θ)=IT0(θ1,θ2,θ3)·0T7(q1)
(17)
采用分段式的轨迹学习方法,以θ为学习轨迹的分界点,构造点光源环境下室内环境灯光多参量联合控制的Lyapunov函数为
(18)
采用多自由度耦合调节方式,进行室内环境灯光的强度跟踪、误差调节和误差跟踪
e1=ϑ-ϑr
(19)
其中,ϑr表示实际光束轨迹[11]。
对灯光的入射方位误差进行求导

(20)
其中,ω2表示入射光线角度。
采用光束轨迹跟随学习方法[12],构建点光源环境下室内环境灯光多参量控制的稳定函数为

(21)


(22)
联合上式分析可得

(23)
分析式(23)可见,点光源环境下室内环境灯光多参量控制过程是稳态收敛的,可以实现对室内环境灯光的颜色、光强、照射角度、波束衍射特征等参量的多参量融合调节和自适应控制,能够有效提高控制精度与控制效果。
4 仿真与结果分析
在室内环境灯光多参量调试中,本实验过程主要使用到的仪器有:MPS-3005L-3直流稳压电源,为人机交互系统提供直流24V电压;示波器,型号为MSO-X-2022A,用于测量电源电路的纹波大小、通信模块的信号波形等。图2、图3分别为直流稳压电源、示波器。

图2 直流稳压电源 图3 示波器
采用Matlab进行点光源环境下室内环境灯多参量控制模型设计,采用NetLogo模拟点光源环境下室内环境灯光控制平台。
图4 外网灯光控制模型
对灯光信息采样的传感器阵列分布为200×200的均匀阵列基元,设定光强信息采样的频率为40KHz,对室内环境灯光的亮度信息采样时长为30s,控制指令输出的时间间隔为1.45ms,光束指令的输出带宽为24Bps,对点光源环境下室内环境灯光控制的指令输入时域波形如图5所示。

图5 室内环境灯光控制的指令输入时域波形
根据图5所示的室内环境灯光控制指令进行灯光的多参量调节和融合处理,用模糊PID控制方法进行点光源环境下室内环境灯光的亮度信息和光源输出信息的优化调节,得到室内环境灯光波束分布如图6所示。

图6 室内环境灯光波束分布
分析图6得知,采用本文方法进行室内环境灯光的多参量控制,光强信息分布均匀,波束调节能力较强。
测试室内环境灯光的多参量弧长与色彩融合度的关系,利用上位机采集室内灯光多参量弧长与色彩数据。

图7 上位机多参量弧长与色彩数据采样
根据数据采样结果得到多参量弧长与色彩的拟合度,结果如图8所示。

图8 灯光控制的色彩融合的水平
分析图8得知,采用本文方法进行点光源环境下室内环境灯光多参量控制,色彩融合性能较好。
采用所提点光源环境下室内环境灯光多参量控制方法、文献[4]基于模糊自适应调度的室内环境灯光多参量控制方法、文献[5]基于Smith结构的点光源环境下室内环境灯光多参量控制方法进行控制精度对比实验。得到的对比结果如表1所示。

表1 控制精度对比
分析表1得知,文献[4]方法的平均控制精度为0.900%,文献[5]方法的平均控制精度为0.935%,本文方法的平均控制精度0.971%,相比之下可以看出,本文方法进行点光源环境下室内环境灯光多参量估计能力更好,控制精度更高。其主要原因是所提方法利用模糊PID进行室内环境光束轨迹跟踪控制,进而对室内环境灯光的多参量进行融合调节,有效的提高了控制精度。
5 结语
为了实现对室内环境灯光的自适应控制,促进节能环保设计和室内灯饰环境优化,本文提出基于模糊PID的点光源环境下室内环境灯光多参量控制模型。结合灯光的照明参量规划方法,进行室内环境灯光的规划设计;基于动态基元的自适应学习方法,进行点光源环境下室内环境灯光的模糊自适应控制;构建模糊PID控制律,进行点光源环境下室内环境的光束轨迹跟踪控制,实现对室内环境灯光的颜色、光强、照射角度、波束衍射特征等参量的多参量融合调节。研究得知,本文方法进行点光源环境下室内环境灯光控制的效能较好,精度较高,可以有效提高光源环境下室内环境灯光的自适应控制程度,为室内环境灯光控制技术的发展奠定基础。
猜你喜欢
建材与装饰(2023年26期)2023-09-20 22:34:14
中国图象图形学报(2023年2期)2023-02-21 03:25:28
福建建筑(2019年11期)2019-12-23 03:00:12
宇航计测技术(2018年3期)2018-09-08 02:21:36
物联网技术(2017年7期)2017-07-20 14:09:05
物理实验(2015年9期)2015-02-28 17:36:51
纺织导报(2014年9期)2014-10-31 00:07:58
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32
声学技术(2014年2期)2014-06-21 06:59:14
中国高新技术企业(2014年1期)2014-01-14 08:31:50
