
一种物料搬运自动跟随机器人装置的设计*
2021-11-16 08:27陈少华陈逸凡林木泉
数字技术与应用 2021年9期
陈少华 陈逸凡 林木泉
(闽南理工学院,福建泉州 362700)
0 引言
近年来,快递物流行业发展迅猛,像菜鸟驿站,熊猫快收,妈妈驿站等物流服务站点等不断涌现。一般中小型的站点多以站点与便利店相结合的方式,店内人员少,劳动压力大。而使用物料搬运自动跟随机器人装置搬运货物,可大大减少人工工作量。该装置在一定程度上能够代替人工操作,减轻站点的劳动压力和支出费用。并且相对于大型的、难以灵巧运动的机械来说,装备了麦克纳姆轮的跟随机器人可实现多角度多方位的移动[1],解决了站点复杂狭小的空间搬运转向不灵活的问题。
1 方案设计(如图1)

图1 总体方案设计图Fig.1 Schematic design drawing
主控采用STM32F103C8T6芯片,价格实惠,内部外设丰富,能够处理大量传感器采集的数据。人机交互部分使用串口屏以及手机App,用户可以通过液晶屏幕或者手机App按键设置小车的运行模式、麦克纳姆轮的速度、以及手动控制小车的运行等。传感器部分使用的是OPENMV摄像头模块与超声波测距模块同时进行识别,摄像头识别颜色的同时,超声波模块检测人体位置,将人机之间的距离通过串口回传给单片机,单片机处理串口数据后控制小车运作。
为了数据传输的稳定同时也兼顾低成本,本装置全部连接都采用有线连接,考虑到需要实际运载物品,将主控板和驱动板都集成在一个小空间内,将摄像头等传感器全部装载在小车外圈,保证足够的空间进行装载货物。ESP32模块作为网关作用,将本装置通过WIFI接入服务器后使用AP P 进行远程控制。该装置主要运行在自动模式下,自动模式下运载货物后实现对人员的自动跟随。若有需求可改成手动操作。
2 实现原理
该装置由两个超声波传感器、一个OPENMV摄像头,绑定成为一个车外传感器部分。有四个麦克纳姆轮、四个编码电机、电机驱动板,构成跟随机器人的运动部分。通过有线连接至车内主控板。
自动跟随的原理:假设被跟随的人员身上穿着印刷着矩形红色色块的工作服。首先从OPENMV摄像头获取图像,截取一帧图片,先对图片进行预处理,调整图片大小,对于图片进行腐蚀和闭操作滤波处理,去除图片中的图像干扰点[2],对于图片进行颜色和形状识别,先对图像进行形状轮廓识别,将获取到的轮廓,提取出需要的轮廓获取轮廓的顶点坐标及长和高,根据这个获取中心点建立坐标系,根据坐标系调整车辆的位置。再将对应的轮廓框选测量其像素点数量,根据像素点数量推算出距离与像素点间的关系,判断车与人的距离[3]。而颜色识别是为确保不会出现相同形状物体进行误导,先将之前获取的轮廓从多颜色RGB格式转换成黑白二值化HSV格式完成阈值分割,设置对应的lower与upper的阈值范围lower/upper之间的为白色,其余黑色,完成进行颜色识别,确保跟随的精确度不易被干扰。超声波模块实现机器人与障碍物的感知,采用了两个超声波接收模块,分别放置在机器两旁, 以此来分辨左右方向上的障碍物,防止左右两侧障碍物对于机器运行时产生影响。当超声波接收部分接收到返回的超声波时,根据返回超声波的时间来确认障碍物的距离[4],以此来保证机器准确避障。通过结合OPENMV摄像头与超声波模块的协调工作,能够达到机器自动跟随精准避障。
手机App控制原理:基于ESP32模块,通过wifi无线连接blinker云平台,使用云平台上提供的各种控件,组合成手机小车遥控器,小车遥控器使用时,手机将通过网络发送给云平台,云平台接受解析功能后,将向esp32物联网模块发送一串json数据[5],通过解析json数据,解析出字符串进行判断按下的按键功能。将对应的功能码发送给单片机处理。
3 系统测试
设备整体结构如图2所示。四轮都是麦克纳姆轮,超声波模块位于搬运小车两侧,OPENMV位于小车正中央。
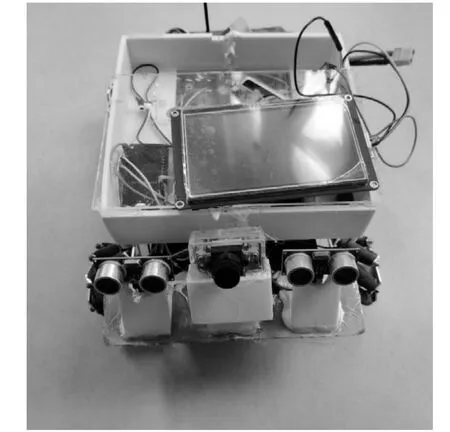
图2 小车实物图Fig.2 Schematic drawing of robot
小车触摸屏幕的显示示内容包括小车的速度,以及当前的控制模式。同时也可以通过串口屏上的触摸按键进行模式的调整,以及小车运行速度的控制。手机屏幕的显示内容包括当前的速度、控制模式和方向控制以及速度控制。在手动模式下可以通过多按键进行精细操作,可通过滑条进行速度控制。
表1 是在自动模式下的测试情况:

表1 自动跟随模式测试结果Tab.1 Test results of automatic following mode
测试结果可知在自动模式下,该装置基本能够实现自动跟随功能,但成功率无法达到100%,主要问题在于麦克纳姆轮可能出现打滑以及人运动时超声波识别可能出现距离误差。在手动模式下,可提高跟随的成功率。
4 结语
本文对物料搬运自动跟随机器人装置的工作原理进行了阐述,提出了一种基于摄像头和超声波的自动跟随方案,且通过实验测试结果表明,该方案能够在一定的误差内实现机器人的自动跟随功能。后期可以在目前的基础上实现手机App设置归位,以及在结构上进行改进。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
装备制造技术(2020年11期)2021-01-26
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子测试(2018年13期)2018-09-26
电子制作(2018年8期)2018-06-26
通信电源技术(2016年5期)2016-03-22
地矿测绘(2015年3期)2015-12-22
机械制造与自动化(2014年1期)2014-03-01
