
寻迹和避障机器车结构及控制设计
2021-11-16 08:25邵宇航林坚曹乃元李雪梅
数字技术与应用 2021年9期
邵宇航 林坚 曹乃元 李雪梅
(桂林电子科技大学机电工程学院,广西桂林 541004)
0 引言
随着智能时代的快速发展,越来越多的智能产品开始进入人们的生活当中。例如近几年汽车行业的无人驾驶技术成为国内外学者的研究热点问题。在工业中,车辆运输一直都是采用人工手动操作驾驶来完成,这样的操作方式不仅浪费了大量的人力资源来管理,同时不能保证效率与安全问题。在军事上,通过无人驾驶技术能够保障侦察运输等功能的安全。在探险救灾中,通过无人驾驶自动探测技术能够解决救援安全的问题。因此文中设计一种能够实现自动寻路避障等功能的智能小车,该智能小车能够采集环境数据,完成一系列无人操作的基本要素。
智能小车在当今也已经有了突飞猛进的发展[1]。小车的主要特点是体积小重量轻,能够应对复杂的情况,并且操作简单活动也比较灵活。智能小车在自动寻迹的过程中能够自动探测周围的障碍并且反馈数据给操作者[2],因此自动寻路避障功能成为了智能小车的核心关键部分。
1 智能小车底盘的设计
智能小车主要设计的重点是寻迹避障。而寻迹避障过程中的重点是信号的输出与输入过程和数据的收集与处理外加反馈[3]。文中把大部分的基础原件都安装在地盘的下方,这样可以起到维持车体重心的作用,同时也可以避免由于震荡所带来的小车部件掉落的问题。智能小车的底盘结构如图1所示。
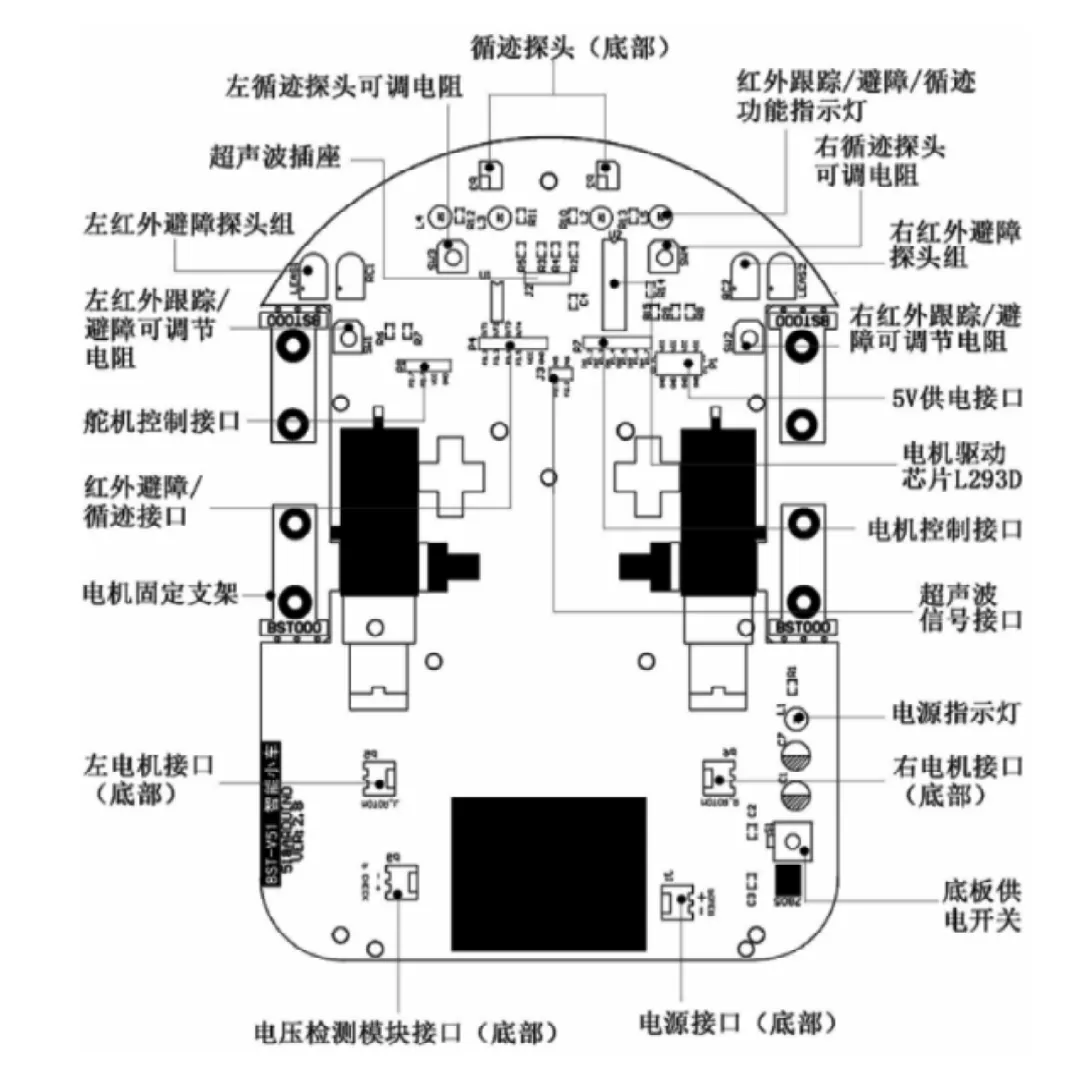
图1 智能小车底盘结构简图Fig.1 Schematic diagram of the chassis structure of the smart car
2 模组与芯片部分
2.1 主控制器
文中采用的主板控制器为Arduino UNO,如图2所示。Arduino实际上是一种集软硬件为一体的开源型电子原型的平台,软件部分为Arduino IDE,在Arduino中可以直接进行程序读写。在Arduino专用的硬件上直接进行程序传输,十分的方便。UNO主板有两种供电方式。第一种是通过链接USB插口进行供电;另外一种是通过外界6-12V的电源进行供电。

图2 主控制器Fig.2 Main controller
2.2 G90舵机
舵机是小车进行转动的主要部件,它是由电机进行驱动。而舵机的电机主要分为直流电机和步进电机两种。考虑到成本问题,文中采用直流电机进行驱动。舵机除了直流电机之外主要的部件还有传感器,齿轮组,和一套控制电路。舵机与普通直流电机相比,直流电机的转动一般不能够控制转动的角度,能够进行连续不断的旋转。相应的,普通直流电机无法进行转动角度信息的反馈。普通的直流电机的控制也同样需要电压模拟。因此D/A转换器成为了一个关键手段。通过D/A转换器模块进行控制,增加直流电机的功率,通过控制电路进行简化,所以需要在主板上传输PWM信号。如图3所示为舵机模块。
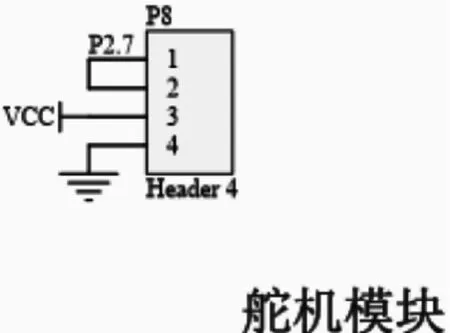
图3 舵机模块Fig.3 Servo module
2.3 红外避障模块
文中设计的智能小车上面拥有4 处红外接受发送模块。上面给VCC供电,下面是一个接地。整个红外发送管在通电之后就会一直不停的发送红外信号,与I/O口没有任何关系。跟它对应的对管是一个红外接收管,会根据红外信号判断周围是否有障碍物而不停的改变。图4为底板上的红外检测模块。

图4 底板上的红外检测模块Fig.4 Infrared detection module on the bottom plate
2.4 提示检测模块
LM324为一个专门的电压比较器,其内部为一个四路的运算放大器。文中将运算放大器当做一个电压比较器。其中IN3为红外检测模块的IN3的电压,把这个电压作为一路进行输入,T3为一个参考电压。这个参考电压是根据一个滑动变阻器进行调节的。当两路电压相同时,会在OUT1口输出一个低电平。之后P3.4接受到低电平之后小灯就会亮起。通过图5最右侧的排针输入到UNO中。

图5 检测提示模块Fig.5 Detection prompt module
2.5 WiFi模块与蓝牙模块
文中采用的WiFi模块和蓝牙模块均为独立元件,安装在智能小车后方的面包板上,分别具有R X D、TX D、GND、VCC引脚。
3 实验
3.1 主板实验
为了验证智能小车主板性能,在Arduino软件中编写程序进行测试,图6所示为在Arduino软件中运行结果。

图6 Arduino 运行结果Fig.6 Arduino running results
3.2 智能小车行驶实验
为了验证智能小车自动寻迹和避障的能力,对智能小车进行实际道路测试。图7为智能小车的示意图。
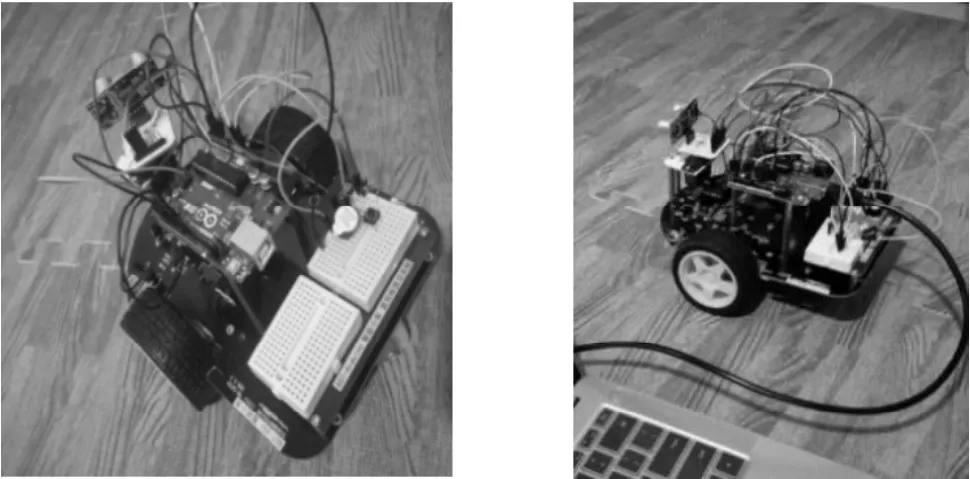
图7 智能小车寻迹和避障示意图Fig.7 Schematic diagram of smart car tracking and obstacle avoidance
小车的黑线循迹主要是依靠红外传感器,小车上面拥有4处红外接收发送模块。整个红外发送管在通电之后就会一直不停的发送红外信号,跟他对应的对管是一个红外接收管,会根据红外信号判断周围是否有障碍物而不停的改变,接收到的红外信号改变以后,反馈到电路中时电阻就会改变,就引起了IN3的电压的改变。反馈到主板中进行分析并调整两个电机进行正转或反转的控制。实验结果达到预期目标。
4 结语
文中提出的智能小车设计、设计电路模块以及编写路径控制程序的方法,处理简单,执行效率高,经过实验验证,该智能小车可以完成自主寻迹和避障的能力。
猜你喜欢
大电机技术(2022年5期)2022-11-17
自动化学报(2019年6期)2019-07-23
股市动态分析(2019年12期)2019-07-08
股市动态分析(2019年50期)2019-01-03
证券市场红周刊(2018年40期)2018-05-14
证券市场红周刊(2018年40期)2018-05-14
电子制作(2018年1期)2018-04-04
电子制作(2017年1期)2017-05-17
制造业自动化(2017年2期)2017-03-20
淮南师范学院学报(2015年3期)2015-03-22
