
无人机不同航线倾斜摄影建模方法比较及改进
2021-11-14 10:04周煜鑫马友鹏
地理空间信息 2021年10期
陈 曦,谭 鑫,高 欢,周煜鑫,马友鹏
(1.成都理工大学信息科学与技术学院计算机科学与技术系,成都 610051)
倾斜摄影是从多角度采集特定地区图像,以此获取建筑物各方位高分辨率纹理的技术。利用倾斜摄影技术可以在较短时间内快速建立三维城市模型[1-2]。它不仅能够反映该地区的真实图像,还能够通过特定技术对图像进行处理,生成更加立体的三维模型。倾斜摄影技术能在规划、测绘、应急等领域提供数据服务,有着很强的实用性[3]。
三维模型的建立质量和收集到的图像质量紧密相关,因此,无人机拍摄的航线规划至关重要,设计合理的航线是三维建模的关键所在。本文中的建模采用多旋翼单镜头无人机模拟倾斜摄影测量,着重于使用单镜头获取全方位的视角,以保证三维建模的质量。
本文以单体建筑的倾斜摄影建模为例,多旋翼单镜头无人机使用大疆Mavic Pro,以两种不同航线采集无人机影像,并通过ContextCapture建立三维模型,最后从建模的完整性和不确定性误差两个方面评估两种不同航线规划方案的优劣。
1 关键理论介绍
1.1 不同航线的规划[4]
1.1.1 网带式航线
无人机只配备有一个镜头,要使航线覆盖整个研究区域,可以让无人机保持45°的俯角,通过网带式航线来覆盖死角(网带式航线即用两条航带式航线以90°角相交,这样可以保证图像的完整性,也极大地提高了图像的获取效率)。此外,网带式航线还具有易于拍摄的特点,当建模区域很大时,可用这种方法快速获得研究区域的完整图像。航线设计如图1所示。
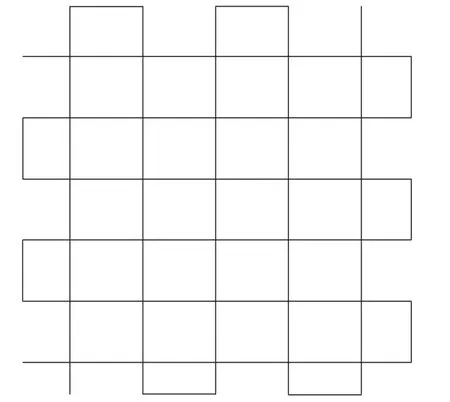
图1 网带式航线示意图
1.1.2 全方位航线(5个方向)
将建筑物视为一个整体,分别从正射、左视、右视方向获取图像。在采集一个面的图像时,若相机能拍摄完整图像,则可横向飞行,直接进行拍摄,否则采用航带式航线。在建筑物的连接处需要额外拍摄图像。因此,这种拍摄方法主要由6部分组成,即建筑物的5个面和拐角处的补充图像。航线如图2所示。

图2 全方位航线示意图
1.2 实景建模关键技术
1.2.1 测试区域选择及概况
在选取建模区域时,应该选择遮挡较少的单体建筑。实验表明,在遮挡较多的地方,特别是遮挡物有大量细节(如枝叶繁茂的树)时,建模的效果会不够准确,具体体现在这些细节处会有失真,并影响到最终模型的完整性。因此,我们应该选择遮挡物少、结构相对简单,但也有部分能够反映建模质量的特征结构的单体建筑。
1.2.2 空中三角运算
空三加密是倾斜摄影测量三维建模的重要环节[5]。目前,大多数倾斜摄影空中三角测量使用传统的POS辅助空三计算,主要方法有模拟法、解析法、航带法、独立模型法和光线束法。通过空中三角测量,我们可以计算获得缺失的影像信息。
在 Context Capture Center平台中新建工程,相机的参数会在导入照片时同时导入,这种方式可以减少整理分区内影像数据的工作量。
1.2.3 精度验证方法比较原理
1)模型完整性比较。在建立3D模型的过程中,不同方法会有不同的模型纹理细节,不同的模型也会有不同的扭曲程度和细节丢失,有的地方甚至会出现空洞。这些细节可以帮助我们较好地比较不同航线下建立模型的优、劣势。
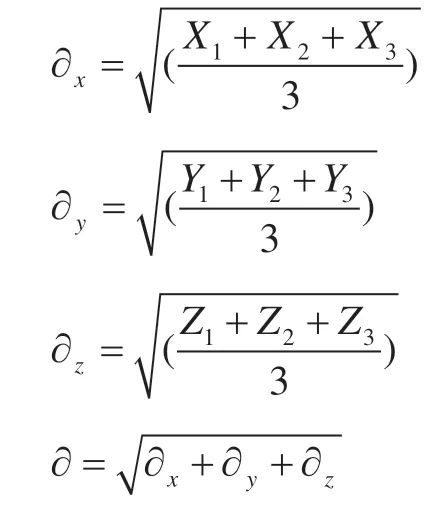
2)通过位置的不确定度进行比较。位置的不确定度可以描述点位的精度。取3个方向的不确定度分别为X,Y,Z,取其最小值、中间值、最大值分别以1、2、3编号,用∂来表达不确定度,利用以下表达式来衡量不确定度,其数学表达式为:
1.3 ContextCapture介绍
ContextCapture是一个用于构建大规模三维实景模型的软件。它可以根据普通照片创建大规模建筑甚至整个城市的3D模型。此软件市场应用时间较长,系统相对稳定,可大幅提高生产效率[6]。
2 实 例
2.1 研究区域选择
成都理工大学香樟食堂是一个三层的类长方体单体建筑,四周遮挡较少,外表方正。在楼顶上有通风管等,可以用来查看建模的细节质量。在食堂正面,有楼梯、屋檐等复杂结构,也有大量的平面,这样既可以用复杂部分的建模情况来比较不同航线建模的质量,也可以查看清晰的建模整体效果。因此,将这里作为建模场所比较理想。
2.2 设备规格参数
2.2.1 相 机
设备为大疆Mavic Pro自带的相机,关键参数有:1)照片最大分辨率为4 000×3 000。
2)影响传感器采用1/2.3 英寸 CMOS,有效像素1 235万(总像素1 271万)。
3)镜头参数:FOV 78.8° 28 mm(35 mm 格式等效) f/2.2。
4)对焦点:0.5 m至无穷远。
5)ISO范围:100~3 200(视频),100~1 600(照片)。
6)支持存储卡类型:Micro SDTM,最大支持 128GB 容量,传输速度为Class。
2.2.2 云 台
云台关键参数:
1)可控转动范围:俯仰:-90°~+30°,横滚:0°或90°(横拍及竖拍模式)。
2)稳定系统:3-轴(俯仰、横滚、偏航)。
2.3 数据获取

表1 拍摄数据
2.4 处理流程
图像处理的大致流程是:
1)对图像进行预处理,对于重复或者重合度高的图像需要进行删除。
2)对添加图像即将进行的空中三角测量计算进行参数设置,如关键点密度、影像组件构造模式、光学属性评估模式、焦距、主点、径向畸变和切向畸变等。
3)使用ContextCapture Center Engine进行空中三角运算。
4)创建项目。这里需要定义项目名称,并选择生产项目的目标。格式及选项页是建立三维模型的关键页,在这里需要明确输出格式、颜色源、纹理压缩质量、最大纹理大小、细节层次等关系建模结果的参数。最后需要选择空间参考坐标系,这里选择WGS 84。 完成设置后开始建模。
5)项目重建完成后,可以使用Acute3DViewer来查看输出结果。
3 对比分析
3.1 模型完整性
图3是分别采用网带式航线和全方位航线进行建模得到的模型结果。网带式航线得到的结果为图3a、全方位航线得到的结果为图3b。
选取模型结果的关键部分进行比较,主要查看其完整性、纹理细节和部分扭曲的情况。可以看到,两种航线下我们均得到了较为完整的倾斜摄影3D模型。但网带式航线受制于其镜头的倾斜角度,在有屋檐遮挡的地方出现了严重失真。这时候,全方位航线的优势便体现了出来,它可以收集到建筑物较为完整的图像信息,这一点在图3a中可以看出,在图片左下方和广告牌左上方,网带式航线的模型均出现了扭曲,而相对全方位航线所建立的模型效果好很多。
对比在纹理细节上,图3a所示的网带式航线的三维模型纹理缺失比较严重,如窗户出现了较为严重的失真,图3b所示的全方位航线的三维模型在平面上的表现依然优于前者,没有出现较为明显的纹理细节缺失。
3.2 数据误差
位置的不确定度是基于每一张图片的位置不确定值所确定的。它分为X轴、Y轴、Z轴3个方向,并有最小值、中间值和最大值。其结果如表2所示。

表2 位置的不确定度
图4是网带式航线和全方位航线位置不确定度的比较。从图4中可以看出,无论X轴、Y轴、Z轴方向还是总体上,全方位航线的误差均大于网带式航线。因此,基于2种不同航线建立的三维模型,点位精度上全方位航线略差,网带式航线精度较高。
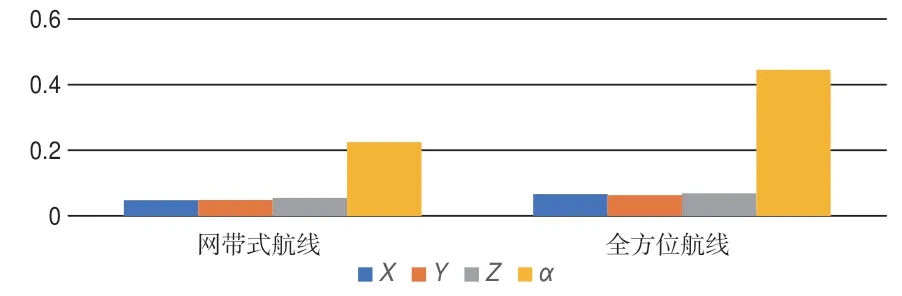
图4 网带式航线和全方位航线的不确定度比较结果
4 方法改进
由上述结论可知,网带式航线和全方位航线各有优劣。如果采集区域很大,并且需要很高的精度,可以将两者结合起来,这样要求付出更长的计算时间,但能够更好地满足需要。将两种航线结合之后,可以观察拍摄点及连接点的分布,拍摄点及连接点的分布情况如图5所示。

图5 拍摄点及连接点 的分布情况
在这样的情况下,建模方法模拟了五镜头倾斜摄影[7],但是比五镜头拍摄有着更高的效率,建筑的全貌和细节都得到了不同程度的补充。用前述的两种方法进行模型质量评估。模型完整性结果可由图6中使用改进方法建模后全方位航线和改进方法的窗格细节 比较得到。
结果表明,改进方法所得模型的细节更加完善,图6a使用全方位航线建模得到的窗格细节图中,最左侧栅栏有部分失真,但在图6b中,这一侧的失真得到了改善。 由于镜头的畸变等因素,所得模型不够清晰。

图6 使用全方位航线和改进方法的模型窗格细节 图
另外,改进方法的∂值为1.019 6,这说明其点位精度不高,由图5拍摄点及连接点的分布情况可得,相机的拍摄角度确实是比较分散的,这一结果也比较符合实际。如果需要更多细节,那么还可以继续增加照片的重叠度,当然也会相应的要求更大的计算代价。因此,充分结合两者的优点,可以让模型质量 更好。
5 结 语
多旋翼单镜头无人机在成本有限的情况下不失为一种进行倾斜摄影建模的选择。模型的质量取决于设备品质、影像质量等[8],也与分辨率有很大关系[9],在这些条件不变的情况下,通过适当的航线规划,我们仍然可以获得质量较高的3D模型。如果需要大面积采集数据,可使用网带式航线,这种航线规划方法较为简单,可以大量节省拍摄成本;若对单体建筑等进行较高细节的建模,则应该采用全方位的倾斜摄影建模方法。若结合两者进行模型建立,其效果可以部分模拟出五镜头无人机拍摄的情况,效果更佳,但是相应的计算成本也更高。
猜你喜欢
小哥白尼(神奇星球)(2021年12期)2021-03-08
软件(2020年3期)2020-04-20
冶金设备(2019年6期)2019-12-25
制造技术与机床(2019年11期)2019-12-04
摄影之友(影像视觉)(2018年12期)2019-01-28
Coco薇(2017年8期)2017-08-03
太空探索(2016年5期)2016-07-12
太空探索(2016年6期)2016-07-10
Coco薇(2015年5期)2016-03-29
橡胶工业(2015年6期)2015-07-29
