考虑车辆跟驰作用和通信时延的网联车辆队列轨迹跟踪控制
2021-11-13 08:05:04李永福邬昌强唐晓铭
自动化学报 2021年9期
李永福 邬昌强 朱 浩 唐晓铭
1.重庆邮电大学自动化学院智能空地协同控制重庆市高校重点实验室 重庆 400065
近年来,随着车车/车路(Vehicle-to-vehicle/vehicle-to-infrastructure,V2V/V2I,简称V2X)[1]通信技术的迅速发展,使智能网联车辆(Connected vehicles,CVs)[2-4]能够通过V2X 通信技术实现车、路和后台的互联互通,从而为智能交通系统的环境感知、建模、协同控制及管理决策提供了完备的信息.轨迹跟踪控制(Trajectory tracking control)[5-6]是智能网联车辆运动控制的关键问题,轨迹跟踪控制形成的车辆队列行驶模式可以有效地减缓交通拥堵、减少能源消耗和增加道路通行能力[7-9].因此,车辆轨迹跟踪控制问题已经成为中外学者研究的热点,绝大部分研究主要通过保证位置跟踪误差和速度的一致性来解决轨迹跟踪控制问题.
对于车辆轨迹跟踪控制问题,控制理论和交通工程这两个角度有着不同的关注点.从控制理论的角度出发,是将车辆看作一个独立的节点.然后,专注于车辆状态信息,设计轨迹跟踪控制器来确保轨迹跟踪性能.然而,车辆运动之间的耦合关系和速度约束经常被忽略,导致负的位置跟踪误差和负速度的出现,即意味着车辆间的安全距离不能被保证,更严重的是追尾事故有可能发生.从交通工程的角度出发,主要提出合适的交通流模型来刻画车辆间的非线性关系.
在车辆轨迹跟踪控制的文献中,轨迹跟踪控制方法主要分为线性控制和非线性控制.在线性控制方面,基于几何学的控制框架,Invernizzi 和Lovera[10]提出一种控制律来保证位置跟踪误差渐进收敛到零.考虑一个互联的领导跟随多车系统,领导者车辆和跟随者车辆的状态信息都能够相互感知,Cai和Hu[11]仅利用车辆的状态信息提出一种分布式轨迹跟踪控制律.基于相邻车辆状态估计,Hong 等[12]提出一种跟踪控制策略来解决时变通信拓扑下的多车系统一致性问题.结合前馈控制和鲁棒控制,Kayacan等[13]基于轨迹跟踪误差模型提出了一种轨迹跟踪控制策略,实现了车辆跟踪直线道路和曲线道路轨迹.然而,车辆是一个高度非线性和强耦合系统,线性的轨迹跟踪控制算法有一定的局限性,不能刻画车辆间的非线性关系.
在非线性控制方面.基于虚拟结构方法,跟随者车辆跟踪虚拟车辆预定的轨迹,Zhang 等[14]提出了一种协同路径跟踪控制律,从而让车辆保持一个期望的队列.利用人工势场法与模型预测控制理论,徐杨等[15]提出一种针对无人车辆轨迹规划和跟踪控制的控制方法,根据参考轨迹来调节纵横向输入以实现跟踪控制.Liang 等[16]通过分析状态变量和控制变量之间的函数关系,利用滑模控制方法设计的速度控制律,提高了轨迹跟踪误差收敛速度和增强了抗干扰能力.针对模型参数不确定的问题,Aguiar等[17]基于反步法提出了一种自适应轨迹跟踪控制方法.在此基础之上,Guo 等[18]研究了考虑参数不确定和额外的干扰的问题,提出一种自适应非线性轨迹跟踪控制策略.针对未知扰动的问题,沈智鹏等[19]引入神经网络对模型不确定性部分进行逼近,设计一种非线性增益递归滑模的轨迹跟踪动态自适应神经网络控制器,该控制器对系统模块参数摄动以及外界扰动具有较强的鲁棒性,并且跟踪响应快和精度高.Yu 和Liu[20]通过考虑速度干扰提出了一种自适应轨迹跟踪控制方法,实现了无界扰动的抑制和跟踪误差的渐近收敛.Wang[21]利用神经网络和自适应估计的方法,通过考虑模型参数和车辆动力学不确定性问题,提出一种分布式自适应协同轨迹跟踪控制策略.
针对通信时延的问题,Peters 等[22]考虑通信时延提出一种领导跟随结构控制策略,保证了车辆队列的串稳定性.基于滑模控制方法,Kim 等[23]提出一种快速终端滑模时延控制器来保证车辆位置跟踪误差渐进收敛.采用分层框架的方法来降低控制器设计和分析的复杂性,Zhang 等[24]考虑时延和参数不确定性提出一种自适应滑模控制器.考虑通信时延和参数不确定性,Yan 等[25]提出了一种协同轨迹跟踪控制策略,实现了多车的协同跟踪任务.然而,上述的控制算法忽略了车辆跟驰作用,导致负的位置跟踪误差出现在文献[20-21]和负速度出现在文献[14]中.最近,Song 等[26]考虑车辆跟驰作用来研究车辆轨迹跟踪控制问题,但采用线性的方法来描述车辆间的关系,并不能够完全刻画车辆间的非线性关系.
目前,车辆轨迹跟踪问题最主要的挑战是在设计控制算法时考虑车辆间的非线性关系,使所提控制器不仅保证位置跟踪误差收敛到零,而且使车辆运动规律符合交通流理论,因此需要提出一种更实际的控制器来解决轨迹跟踪问题.为了解决以上提到的问题,我们之前的工作[6]考虑车辆跟驰作用来解决智能网联车辆轨迹跟踪问题.这个工作专注于一个理想的通信环境和领导者车辆速度恒定,但是没有考虑车车通信过程中存在的通信时延问题.
本文的主要贡献如下:1)在车辆互联环境中,提出一种双向领导跟随通信拓扑来描述车辆间的通信连接,队列内的车辆可以通过双向领导跟随通信拓扑进行信息交互;2)不同于文献[14,20-21],设计控制器时忽略了车辆跟驰作用,本文考虑车辆跟驰作用和通信时延,提出一种分布式非线性轨迹跟踪控制器.所提控制器不仅保证位置跟踪误差收敛到原点,而且使车辆运动规律符合交通流理论,即避免了负的位置误差和负速度出现;3)在仿真实验中,考虑速度干扰作用于领导者车辆,设计三种场景:无时延、同质时延和异质时延进行数值仿真实验,数值仿真实验证明了所提控制器的有效性.
本文结构如下:第1 节给出了预备知识及问题描述;第2 节提出一种非线性轨迹跟踪控制器,然后给出了所提控制器稳定性的证明;第3 节给出了仿真实验与实验结果分析和对比;第4 节为本文结论.
1 预备知识及问题描述
如图1所示的交通场景中,由n辆智能网联车辆组成的车辆队列行驶在道路上,车辆队列包含一个领导者车辆(标记为 Vehicle leader)和n-1个跟随者车辆(标记为 Vehicle 1~Vehiclen-1).初始时刻,车辆的初始状态不同,相邻车辆之间的初始间距是不相等的.如图2所示,因此本文通过考虑车辆跟驰作用和有界的通信时延提出一个分布式非线性控制器,所提控制器保证跟随者车辆能够跟踪领导者车辆轨迹并和领导者保持期望的间距Di,L,其中,包括跟随车辆和领导者之间期望的纵向和侧向间距.

图1 双向领导跟随通信拓扑示意图Fig.1 Information flow of BDLF communication topology

图2 轨迹跟踪示意图Fig.2 Trajectory tracking of follower vehicle i profile
1.1 车辆模型


1.2 图论

1.3 控制目标

1.4 轨迹跟踪控制框架
为了解决智能网联车辆轨迹跟踪问题,本节提出了轨迹跟踪控制框架.如图3所示,该轨迹跟踪

图3 轨迹跟踪控制框架Fig.3 Trajectory tracking control framework
控制框架由产生领导者车辆轨迹、设计控制器和得到跟随者车辆轨迹三部分组成.
首先,领导者轨迹由初始设定的领导者速度和初始位置产生,位置跟踪误差通过坐标变换定义得到.然后,通过考虑车辆跟驰作用、通信时延和跟随者与领导者车辆间的间距差和速度差,提出一种分布式非线性轨迹跟踪控制器.最后,根据车辆运动学模型(1)积分可以得到跟随者车辆的轨迹.
2 控制器设计及稳定性分析
2.1 控制器设计
为解决在第1 节中提出的问题,基于车辆动力学模型,本文考虑车辆跟驰作用和有界的通信时延提出一种分布式非线性轨迹跟踪控制器.所提控制器如下:


2.2 稳定性分析



3 数值仿真
在本节中,通过数值仿真实验来验证所提出的轨迹跟踪控制器的性能.智能网联车辆队列由1 个领导者和5 个跟随者车辆组成,此外,为了研究通信时延对轨迹跟踪性能的影响,进行无时延、两组同质时延和异质时延数值仿真实验.
总而言之,房地产行业发展对推动我国整体经济发展有着重要作用,降低房地产金融风险是当前解决房地产行业问题的重中之重。因此,实施有效的房地产金融风险管理及应对策略,开拓多元化的融资渠道,加强政府宏观调控,建立并落实个人信用制度,从各个方面将房地产金融风险降到最低,保证房地产行业健康有序的发展。
3.1 仿真设置
对6 辆智能网联车组成的车辆队列进行数值仿真,领导者车辆的初始条件为:xL(0)=45 m ,θL(0)=0 rad和ωL(0)=0 rad/s. 假设头车做匀速运动,为研究所提车辆轨迹跟踪控制器的抗干扰能力,速度干扰作用于领导者车辆,即:uL(t)=kυ+ξL(t),其中kυ=10 m/s
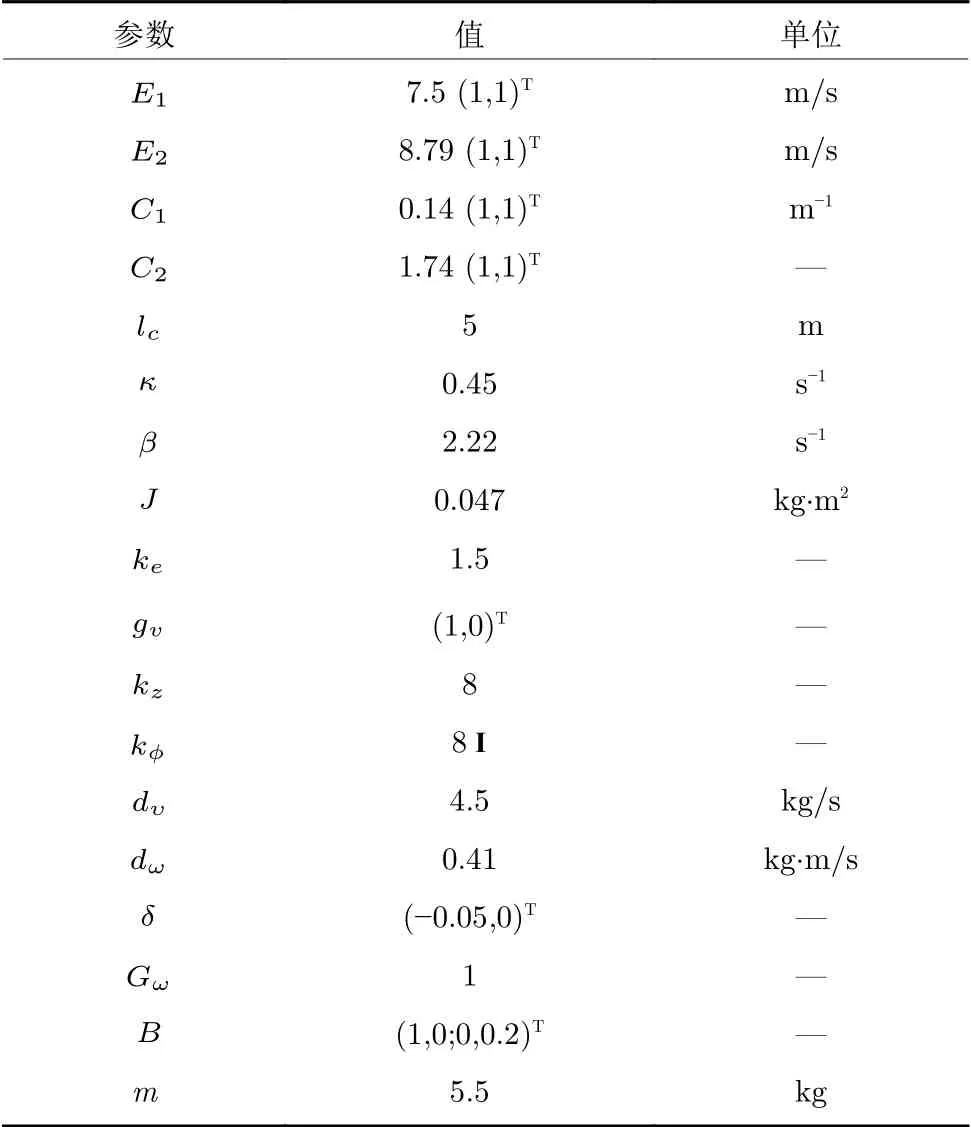
表1 控制器参数Table 1 Controller parameters
3.2 结果讨论
仿真结果如图4~9所示.图4 给出了在所提控制器下的位置轨迹图.图4 表明,在设置的无时延、两组同质时延和异质时延4 个场景里,队列内的5个跟随者车辆可以平稳地跟踪领导者车辆轨迹.当领导者车辆受速度的干扰时,在本文所提控制器(5)和(6)作用下,队列内的所有跟随者车辆速度也能收敛到和领导者车辆速度一致,并保持期望的安全间距.

图4 位置轨迹图Fig.4 Position trajectory profile
图5 是控制输入F(t)图.由图5 可知,跟随者车辆的控制输入随着领导者停止行驶而趋于零.由图5(a)得出,无时延情况下,跟随者车辆的控制输入平滑,且没有出现负的控制输入.由图5(c)~5(d)得出,通信时延对控制输入有一定的影响,控制输入在稳定前出现了波动,且出现了负的控制输入.

图5 控制输入 F(t)图Fig.5 Control input F(t)profile
图6 是位置跟踪误差图.由图6 得出,位置跟踪误差都能稳定地收敛到零,表明相邻车辆之间的纵向间距都能稳定地收敛到5 m.本文提出的控制器能有效地保证队列中的跟随者车辆完成轨迹跟踪并稳定地形成车辆队列.图6(a)以及图6(c)~6(d)可知,在无时延、同质时延τ=0.10 s 和异质时延下,跟随者车辆跟踪领导者车辆并形成稳定的车辆队列时间分别是t=10 s 、t=20 s 和t=26 s,表明通信时延对车辆轨迹跟踪有一定的影响,异质时延的影响最大,在时延的影响下,出现了负的位置跟踪误差.由图6(a)可知,负的位置跟踪误差被避免,因为本文设计控制器时考虑了车辆跟驰作用.

图6 位置跟踪误差图Fig.6 Position error profile
图7 给出了队列内所有车辆的速度图.基于图7,领导者车辆做匀速运动,最后队列中跟随者车辆的速度都能稳定收敛到和领导者速度一致.图7(a)表明无时延下,跟随者车辆在稳定地跟踪领导者车辆之前,跟随者车辆最大速度为7.4 m/s,且没有负速度的出现.图7(c)~7(d)表明在同质时延τ=0.10 s和异质通信时延下,跟随者车辆也能跟踪领导者车辆轨迹.但由于设置通信时延超过了通信时延的上界,有负速度的出现.
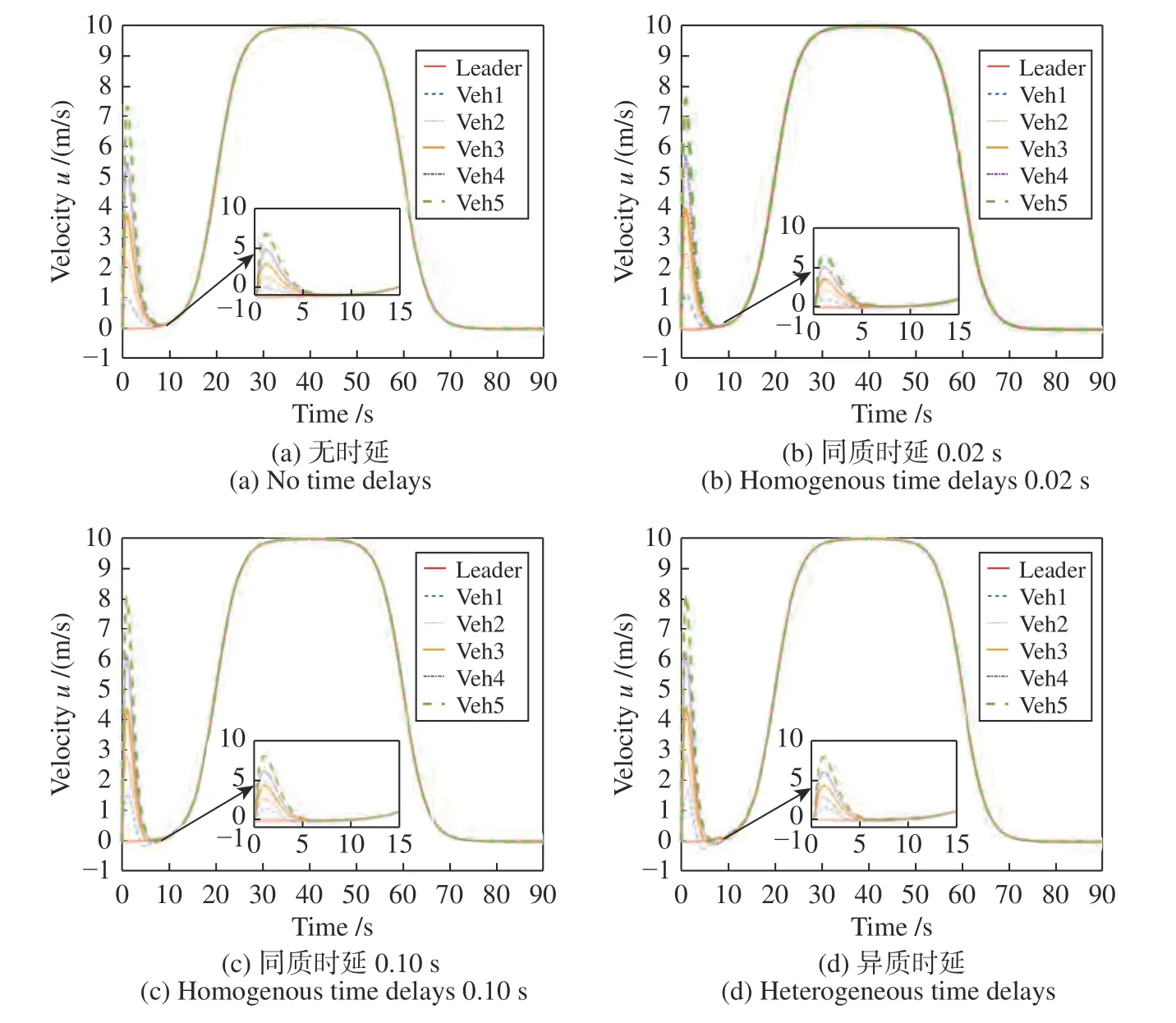
图7 速度图Fig.7 Velocity profile
图8 表明速度误差都能稳定收敛到0 m/s.基于图8(a)以及图8(c)~8(d),在无通信时延、同质时延τ=0.10 s 和异质时延下,速度误差收敛到0 m/s的时间分别为t=10 s 、t=20 s 和t=26 s. 其中,在通信时延的影响下,速度误差在收敛到零之前,出现了一定程度的波动.在同质时延τ=0.10 s 和异质时延下,速度误差振幅最大值分别为0.2 m/s和0.3 m/s.

图8 速度误差图Fig.8 Velocity difference profile
图9 给出了所提控制器下的加速度图.基于图9(a)以及图9(b)~9(d),在无时延、同质时延τ=0.02 s,0.10 s 和异质时延下,加速度振幅分别为2.2 m/s2、2.3 m/s2、2.6 m/s2和2.8 m/s2.时延对加速度有一定的影响,在异质时延下加速度的振幅比同质时延下加速度的振幅大.
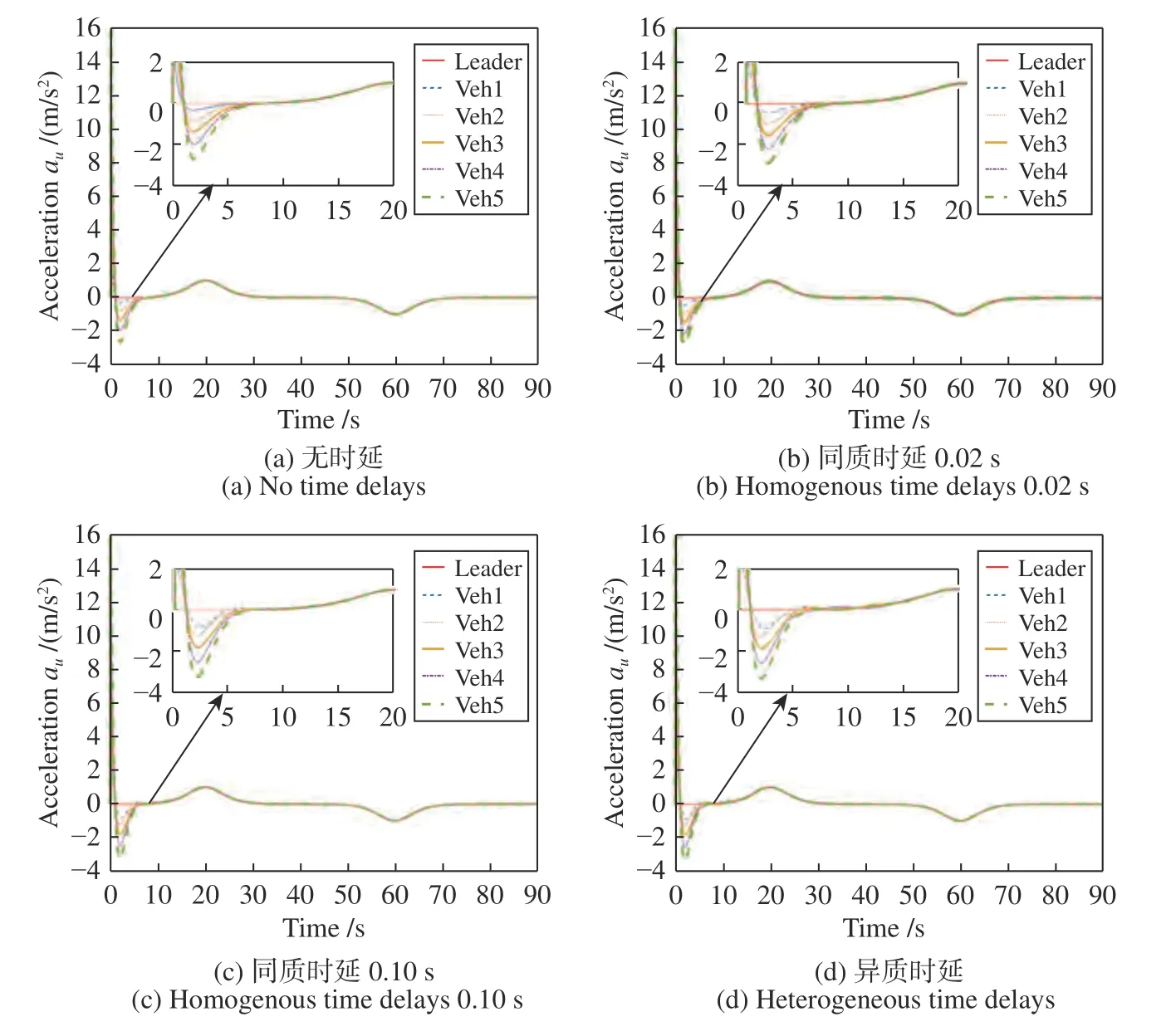
图9 加速度图Fig.9 Acceleration profile
本文设置两组同质时延(即τ=0.02 s ,τ=0.10 s)数值仿真实验,其目的是为探究通信时延对轨迹跟踪性能的具体影响.针对本文所提车辆轨迹跟踪控制器(5)和(6)设置的仿真场景以及所给控制器参数(ke=1.5 ,kφ=8),根据仿真结果图4(a)~9(a)、图4(b)~9(b)以及图4(c)~9(c)可知,当τ ∈[0 s,0.02 s]时,负的控制输入、负的位置跟踪误差以及负速度不会出现;当时,负的控制输入、负的位置跟踪误差以及负速度会出现,但此时系统会趋于稳定.
综上,图4~9 给出的位置轨迹、控制输入、位置跟踪误差、速度、速度误差和加速度图,表明了本文提出的控制器对智能网联车辆的轨迹跟踪控制有很好的控制效果,不仅能保证跟随者车辆跟踪领导者车辆轨迹,而且使车辆运动规律符合交通流理论,即避免了负的位置跟踪误差和负速度的出现.此外,数值实验表明,时延对轨迹跟踪效果有一定的影响,异质时延对轨迹跟踪性能的影响比同质时延对轨迹跟踪性能的影响显著.通信时延对轨迹跟踪性能的影响比较如表2所示.

表2 不同时延下的性能比较Table 2 Performance comparisons under different time delays
3.3 对比分析
对比位置跟踪误差图,在文献[20-21]中,有负的位置跟踪误差出现的现象,即意味着车辆间的间距小于安全间距,车辆追尾事故有可能发生.其中,在文献[20]中,负的位置跟踪误差超过了6 m,这是严重不合理的.由图6(a)可知,所提控制器可以避免负的位置跟踪误差,因为本文设计非线性控制器时考虑了车辆跟驰作用.
在文献[14]中,有负速度出现的现象,即意味车辆在道路上出现倒车的现象,这在实际的交通中是不合理的.由图7(a)可知,在轨迹跟踪过程中,队列中的车辆在所提控制器的作用下可以避免负的速度,因为本文设计非线性跟踪控制器时考虑了车辆跟驰作用.
数值仿真实验结果证明了本文所提控制器的有效性,不仅保证跟随者车辆能够跟踪领导者车辆轨迹,而且避免了负的位置跟踪误差和负速度的出现.
4 结束语
本文考虑车辆跟驰作用和车车通信过程中存在的通信时延问题,基于车辆动力学模型,提出了一种分布式非线性轨迹跟踪控制器解决来智能网联车辆轨迹跟踪控制问题.不仅保证位置跟踪误差收敛到原点,而且使车辆运动规律符合交通流理论,即无负的位置跟踪误差和负速度的出现.在车辆互联环境中,提出一种双向领导跟随通信拓扑来表征车辆间的通信连接,队列内的车辆通过双向领导跟随通信拓扑进行信息交互.通过考虑车辆跟驰作用、有界的通信时延、车辆间距差以及速度差提出一种分布式非线性轨迹跟踪控制器.利用Lyapunov 方法证明了所提控制器的稳定性.最后,考虑速度干扰作用于领导者车辆,针对无时延、同质时延和异质时延三种场景进行数值仿真实验,仿真结果验证了所提控制器的有效性.
猜你喜欢
小学生学习指导(低年级)(2020年4期)2020-06-02 09:09:26
软件(2020年3期)2020-04-20 00:58:44
军营文化天地(2018年2期)2018-12-15 17:39:08
中国广播(2017年9期)2017-09-30 21:05:19
产品可靠性报告(2017年7期)2017-09-05 09:49:12
—— 瓮福集团PPA项目成为搅动市场的“鲶鱼”
当代贵州(2017年24期)2017-06-15 17:47:35
诗潮(2017年5期)2017-06-01 11:29:51
云南师范大学学报(自然科学版)(2015年5期)2015-12-26 12:46:16
中央民族大学学报(自然科学版)(2015年2期)2015-06-09 08:45:26
中南财经政法大学学报(2015年5期)2015-04-07 03:43:24