基于云模型和多目标规划的FADS系统测量精度的研究
2021-11-13 01:58:16胡嘉悦贾乾磊章卫国李广文史静平刘小雄
西北工业大学学报 2021年5期
胡嘉悦, 贾乾磊, 章卫国, 李广文, 史静平, 刘小雄
(西北工业大学 自动化学院, 陕西 西安 710072)
2018年和2019年,印度尼西亚狮航和埃塞俄比亚航空公司先后发生两起重大空难事件,共计造成346人死亡。事后经过多方调查,一个重要原因是波音737MAX型客机在飞行过程中迎角传感器的测量结果出现异常,进而影响了飞行控制系统,最终导致飞机坠毁。因此,保证大气数据传感器测量精度是至关重要的,将直接关乎到整个飞行安全。
传统的探针式大气数据传感器以空速管为基础,配合迎角传感器、侧滑角传感器,对迎角和侧滑角等状态量进行测量。但是需要注意的是,现代飞行器的飞行包线越来越大,飞行环境也更加复杂,外露的探针易受到各种外界干扰,测量精度难以得到保证。为了解决这个问题,美国、法国等国先后开展了关于嵌入式大气数据传感器(flush air data sensing,FADS)的研究,并已于近年运用在X-33、X-43A等飞行器上[1-3]。
和探针式大气数据传感器不同,FADS系统主要利用嵌入在机头的压强传感器测量出的各点压强值进行迎角、侧滑角等状态量的推导计算,有效地克服了传统探针式传感器的缺点和不足。
目前国内外针对FADS系统算法的研究主要可以分为最小二乘迭代法、神经网络法、Kriging法、查表法和“三点法”。文献[4]首次提出基于最小二乘迭代法的解算算法,但是此方法的弊端是实时性较差,且不易收敛,因此并没有得到广泛运用。文献[5-6]提出基于神经网络的解算算法,但是此方法需要大量数据支撑,一旦数据不充分或者不真实,测量精度就会受到很大影响。和神经网络法类似,Kriging法[7-8]和查表法[9]都对样本需求量较大,因此至今都未在飞行器上得到应用。除了上述方法外,NASA提出的“三点法”是迄今为止最为成熟应用范围最广的算法,此方法理论简单且精度较高[10],但是其缺陷是在对系统冗余信号进行融合时,仅仅是简单的算术平均,而并没有充分考虑各组信号的差异性。
为了解决这个问题,以“三点法”为基础,提出一种全新的方法提高FADS系统的测量精度。
提出一种利用正态云模型分析信号不确定性与随机性,并结合多目标规划方法计算客观权重的全新方法提高FADS系统的测量精度。
1 问题描述
FADS系统是目前关于大气数据传感器研究中一个热点部分,国内外很多机构均陆续开展了相关研究。其中,运用于X-33型飞机的FADS系统是目前公认最为成熟的,因此,以此系统为基础开展相关研究。
1.1 FADS系统测量原理
根据亚声速条件下的位势流模型和超声速条件下的牛顿流模型可以得到FADS系统表面压力数学模型
Pi=qc[cos2(θi)+εsin2(θi)]+P∞
(1)
式中:Pi为第i个测压孔的压强值;qc为大气动压;ε为修正系数,受迎角α、侧滑角β和马赫数Ma同时影响,记为ε=f(α,β,Ma);θi为来流入射角,是测压孔的位置角(圆周角φi和圆锥角λi)、迎角和侧滑角的函数,记为
(2)
X-33型飞机的FADS系统中各测压孔的布局和位置角如图1和表1所示。

表1 各测压孔的圆周角与圆锥角
考虑到2号孔和4号孔呈横向分布,当飞机迎角改变时,2个孔的压强值不会出现明显变化,也就是说,这2个孔的压强值并不能很好地反映迎角的改变。因此,本文主要利用呈纵向分布的4个测压孔进行迎角的解析计算。
“三点法”的思想是从1,3,5和6号孔中按照排列组合的方式选出3个测压孔,将其压强值Pi,Pj和Pk带入(1)式,可以得到
Pi=qc[cos2(θi)+εsin2(θi)]+P∞
Pj=qc[cos2(θj)+εsin2(θj)]+P∞
Pk=qc[cos2(θk)+εsin2(θk)]+P∞
联立方程得到
(3)
式中,θi,θj和θk表示3个测压孔的来流入射角。
整理(3)式得到
Γijcos2θk+Γjkcos2θi+Γkicos2θj=0
(4)
式中:Γij=Pi-Pj,Γjk=Pj-Pk,Γki=Pk-Pi。将(2)式代入(4)式,利用元素之间的一一对应关系消去侧滑角,得到迎角计算公式
(5)
式中
(6)
1.2 测量误差分析
由(6)式可以看到,在计算最终迎角时传统的“三点法”只是对4组解析值进行简单的算数平均,但是在测量过程中,由于测量噪声的干扰,α1,α2,α3和α4会围绕着实际值呈现不同幅度的上下波动,也就是说,4组信号的置信度是不同的,要想得到精确的最终解,必须对每组信号的不确定性和随机性进行具体分析,然后根据置信度的不同进行加权求和。
为了解决这个问题,正态云模型被用来对信号的不确定性和随机性进行分析。
2 基于正态云模型的FADS改进算法
2.1 正态云模型定义
正态云模型是一种有效的定性概念和定量概念之间的转化工具,一个标准的正态云模型由期望Ex、熵En和超熵He组成[11]。
设x是论域C的一次随机实现,若x满足x~N(Ex,En2),其中En~N(En,He2),那么x对C的确定度满足
(7)
各云滴分布情况如图2所示。

图2 正态云模型云滴分布图
2.2 云模型的基本运算规则
假设存在i朵云模型Yi(Exi,Eni,Hei):
1) 加法运算:
2) 集结算子:
Y1⨁…⨁Yi=
式中:wj为各云模型的权重值。
2.3 云发生器
2.3.1 正向云发生器
正向云发生器是定性到定量的映射。输入是Ex,En,He以及需要产生的云滴数量N,输出为N个定量云滴。
算法步骤:
1) 产生一个期望值为Ex,方差为En的正态随机数xi;
2) 产生一个期望值为En,方差为He的正态随机数En′;
3) 计算:yi=e-(xi-Ex)2/2(En′)2;
4) 令(xi,yi)为一个云滴;
5) 重复步骤1) ~ 4),直至产生N个云滴。
2.3.2 逆向云发生器
和正向云发生器相反,逆向云发生器是定量到定性的映射,输入为N个定量云滴(xi,yi),输出为Ex,En和He。
算法步骤:


2.4 算法流程
算法流程如下所示:
1) 将测量信号转化为正态云模型
在利用正态云模型对FADS系统的测量信号进行分析时,首先选取连续的N个采样点,利用逆向云发生器对4组测量信号α1,α2,α3和α4进行处理,得到相对应的正态云模型Y1(Ex1,En1,He1)、Y2(Ex2,En2,He2),Y3(Ex3,En3,He3)和Y4(Ex4,En4,He4),其中参数熵和超熵分别表示信号的随机性和不确定性。
2) 合成各正态云模型
在得到正态云模型Y1,Y2,Y3和Y4后,下一步就是利用2.2节中的集结算子对四组云模型进行融合,得到最终的合成正态云模型Y(Ex,En,He)。其中
3) 得到最终迎角值
在获得了合成的正态云模型Y(Ex,En,He)后,利用2.3.1节中的正向云发生器对Y进行映射,得到对应的N个定量云滴,即为最终融合后的迎角值。
值得注意的是,在利用集结算子时,一个至关重要的问题是权重向量的选择。在FADS系统的传统迎角解算算法中,4组冗余信号的权重是主观赋予的,皆为25%,但是这种方法的缺点是主观性太强,缺乏客观合理性,没有充分考虑每组信号的差异,因此得到的结果难以令人信服。为了解决这个问题,从多目标规划的角度出发,提出一种针对FADS系统测量信号的客观权重计算方法。
3 多目标规划计算FADS的信号权重
多目标规划是数学理论的一个重要分支,主要研究多个目标函数在给定区域内的优化问题。由上文可以知道,FADS系统的4组冗余信号融合后的云模型为Y(Ex,En,He),其中
可以看到,一个关键的问题是如何得到1组合理的权重向量W={w1,w2,w3,w4},使得最终迎角的不确定性和随机性最小且均值尽可能的接近4组信号的均值。由此得到以下3个目标函数
限制条件
经过对目标函数分析后可以发现,这是一个典型的多目标规划问题,无法得到1组权重向量使其同时满足(8)~(10)式。为了解决这个问题,我们采用松弛变量法和拉格朗日乘子法计算在给定区域内能够最大程度同时满足3个目标函数的权重向量。
算法步骤:
1) 构建总目标函数F(W)
F(W)=min·
2) 添加松弛变量Z={z1,…,z8}
本部分的目的是将不等式约束转换成等式约束以便下一步计算。
3) 利用拉格朗日乘子法降阶
在添加松弛变量后,此问题已经转换成等式约束下的最小化问题。但是需要注意的是,维度也由R4增加至R12,计算将十分复杂。因此,一个有效的办法是增加拉格朗日乘子μk,ν和γ,将问题转换成无约束最小化问题。
将F(W,μ,v,γ)整理为
通过配方可以得到
知minψ(W,μ,v)的解为
因此:
4) 利用单纯形法解无约束最小化问题
先对(11)式中的参数赋予初值,然后进行鉴别看是否是最优解,如果不是则转换到另一改进后更优的基本可行解,再进行鉴别。通过优化迭代,直到(11)式实现最小值,得到最终的权重向量。
4 仿真验证
4.1 FADS系统数据获取
以往关于FADS系统的研究基本着重于介绍亚声速及超声速条件下的空气动力学知识,对于具体的数据库则很少公布。通过仿真验证本文提出的利用正态云模型和多目标规划对FADS系统的算法改进效果时,需要获取算法的输入数据即测压孔的压强值。为了解决这个问题,利用CFD软件计算不同情况下测压孔压强值与迎角等状态量的关系,然后建立插值表,这样经过插值计算便可以得到给定状态下的压强值,随后将压强值代入算法,解算得到迎角等状态量,通过比较给定的状态量和解算得到的状态量的差异对算法的性能进行分析。不同状态下的各测压孔的压强值如图3~4所示。

图3 飞行高度10 000 m时的压强数据 图4 飞行高度12 000 m时的压强数据
4.2 仿真算例
为了验证所提出方法的有效性,设定飞机飞行速度Ma=1.3,飞行高度11 000 m,实际迎角αa=2°,侧滑角0,各测压孔上的测量噪声为均值为0,方差300的高斯噪声,仿真时长T=10 s,信号采样频率f=50 Hz,参数ε=10-6,单纯形法参数β=0.5。
解算结果α1,α2,α3和α4如图5所示,可以看到,由于受到测量噪声的影响,4组解析值均围绕实际值上下波动,但是各组信号的波动幅度和离散程度是不一致的。
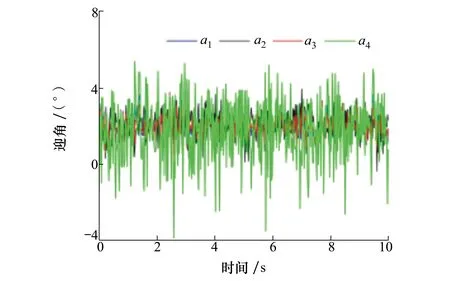
图5 4组迎角解析值
计算步骤如下所示:
1) 生成云模型
利用逆向云发生器求得各信号参数值,如表2所示,其中云滴个数N=Tf=500。

表2 各组信号参数值
利用正向云发生器得到云图,如图6所示。

图6 4组信号的正态云模型
2) 计算权重
利用多目标规划中的松弛变量法和拉格朗日乘子法计算得到4组信号的权重向量为
W={w1,w2,w3,w4}={0.01,0.05,0.93,0.01}
3) 加权求和
利用集结算子和步骤2)中得到的权重向量,对4组云模型进行融合,得到最终云模型Y(1.998 9,0.553 0,0.093 2)。
4) 得到最终迎角值
利用正向云发生器对Y进行处理,得到500个云滴,即为最终迎角,如图7中红色曲线所示。
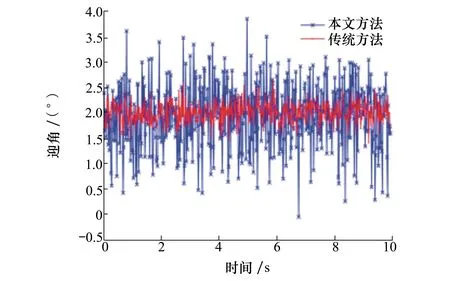
图7 2种方法的计算结果
4.3 对 比
为了验证所提出方法的有效性,在相同的仿真情况下将其与传统方法进行比较分析,从图7中可以看到,相较于红线而言,采用传统方法计算得到的蓝色曲线的波动幅度明显更大。表3是2种方法测量结果的特性表,主要包含平均值、标准差和方差等3种常用统计参数。可以看到,所提出方法的计算结果更接近于实际值,相较于传统方法,测量精度提高了3.2%,数据离散程度降低了68.88%。

表3 2种方法测量结果特性表
为了进一步分析这2种方法在不同噪声条件下的测量精度,分别将例子中的方差设置为3002,5002,7002,9002,1 1002,得到的测量精度结果如图8所示。

图8 2种方法在不同情况下的测量精度
显而易见,提出的方法在较高强度的噪声条件下仍能保持较好的测量精度,具备更强的抗干扰性。
4.4 分 析
从上文可以看到,2种方法均可以在一定程度上跟踪实际值,但是提出的方法明显精度更高,信号离散程度更低,随着噪声方差的增加,相较于传统方法,提出的方法仍然具备较好的测量精度。出现这种情况的主要原因是传统方法仅对冗余信号进行简单的算术平均,而没有考虑每组信号所具备的不确定性和随机性,而本文则利用云模型很好地体现了这2个特性,并在权重分配上充分考虑了每组信号的差异性。
5 结 论
针对FADS系统“三点法”测量精度不够准确的问题,提出了一种改进的模糊融合方法,结合理论和数值结果分析,可以得出以下结论:
1) 提出的算法从系统数学模型出发,利用正态云模型深入分析系统冗余信号的不确定性和随机性,然后借鉴多目标规划思想提出一种新的权重计算方法,再利用云模型集结算子和权重向量对冗余信号进行融合,算法流程清晰,有利于工程实际中的应用。
2) 通过对比仿真不同方法在不同方差噪声干扰情形下的结果,可知提出的方法在干扰比较强的时候仍然拥有更高的测量精度,抗干扰性更强。
本文所设计的方法主要利用多目标规划思想重新计算信号权重,但考虑到此方法可能会遇到局部最小值的问题,因此未来将会针对改进权重计算方法开展研究。
猜你喜欢
北京航空航天大学学报(2021年6期)2021-07-20 07:23:52
海峡科学(2021年12期)2021-02-23 09:43:28
小天使·六年级语数英综合(2019年6期)2019-06-27 06:42:53
统计与决策(2017年2期)2017-03-20 15:25:23
电测与仪表(2016年15期)2016-04-12 00:30:58
地球环境学报(2016年1期)2016-03-06 11:55:09
湖北师范大学学报(自然科学版)(2015年1期)2016-01-10 08:41:14
地球环境学报(2015年2期)2015-02-28 14:02:54
科技传播(2014年4期)2014-12-02 01:59:42
技术经济(2014年8期)2014-02-28 01:29:42