
基于宏应变曲率的桥梁式动态称重方法研究
2021-11-12 00:55陈适之冯德成韩万水
工程力学 2021年10期
陈适之,冯德成,杨 干,韩万水,吴 刚
(1. 长安大学公路学院,西安 710064;2. 东南大学土木工程学院,南京 210096)
车辆荷载作为桥梁所受主要作用,呈现出等高度的随机性和地域性[1]。为保障桥梁运营使用安全,在设计中更合理地考虑车辆效应,监测车辆荷载信息意义非凡[2]。
现有车辆荷载监测技术包括静态称重和动态称重(Weigh-in-motion,WIM)两类[3]。静态称重即地磅,精度高,但测量耗时久,易造成交通堵塞,设备成本高昂。为此,不停车快速称重的WIM 被提出。WIM 可分为路面式(Pavement WIM,P-WIM)和桥梁式(Bridge WIM,B-WIM)两类[4]。P-WIM 的传感器布设于路面铺装层内,通过测量车辆经过时的车轮压力反推车辆荷载。由于仅依赖车轮通过时几毫秒内的动压力,测量精度有限。铺装层内的传感器直接承受车轮压力,极易受损,耐久性不足,安装维护需中断上部交通,引起诸多不便[5]。
为解决P-WIM 的不足,Moses 提出了B-WIM方法[6]。其核心思想是以桥为秤,通过测量车辆经过时的桥梁响应反演车重。该类方法初期需要路面式车轴检测装置得到车速和轴距后才能实现车重测量,故仍存在P-WIM 中的问题[7-8]。随后,有学者提出无需任何路面装置的B-WIM 方法[9-10]。邓露等[11]基于虚拟简支梁理论提出了仅通过梁底应变响应反推车辆车速、轴距、轴重的方法。随后邓露等[12]又通过数值模拟,对常见B-WIM 方法在中小跨径混凝土梁桥上的适用性进行了对比验证。目前B-WIM 方法还存在两大问题:1) BWIM 方法对于车辆单轴轴重不敏感,常误将轴距小的群轴识别为单个车轴[13];2) B-WIM 方法主要基于应变片测量梁底应变响应识别车重[14-15]。应用中应变片常因结构变形、电磁干扰和化学侵蚀等作用失效,精度、耐久性较差[16]。这些问题严重限制了B-WIM 的应用推广。
针对应变片耐久性的问题,有学者通过换用加速度响应或支座剪力等指标反演车辆荷载[17-18]。Li 和Wu[19]基于区域传感理念,用玄武岩纤维对光纤光栅(Fiber Bragg Grating, FBG)进行封装,开发出长标距FBG 传感器,可测量标距范围内结构的宏应变。相较于应变片,长标距FBG 的耐久性及鲁棒性提升显著。同时,它基于光信号传感不受电磁干扰影响,亦可用光纤串联以便现场安装。已有研究初步将其应用于车辆动态称重,但只能识别车辆总重[20]。
为此,本文基于长标距FBG 传感器序列,提出基于宏应变曲率的桥梁式动态称重方法,可识别通过车辆的车速、轴距和轴重。具体内容如下:首先对长标距FBG 及相应提出的B-WIM 算法理论基础进行阐述;随后,通过试验验证的车桥耦合数值模拟,对方法在不同参数工况下的表现进行探究,包括不同车型、车速、路面粗糙度、传感器位置及标距长度。
1 基于宏应变测量的B-WIM 方法
1.1 长标距FBG 传感器及宏应变测量
长标距FBG 是通过将点式FBG 进行长标距封装而成,基本结构如图1,包含一段护套,一个FBG,两个锚固点和一段护套。护套与内部的光纤FBG 仅在两个锚固点处相连,用于保护内部FBG。基于护套加锚固点这一封装结构,内部的FBG 与被测结构仅在锚固点处相连,故最终测量得到的是结构在标距范围内的平均应变,即宏应变εMacro(图2)。长标距FBG 有效增强了点式FBG的监测范围,也使其不易因结构表面开裂突起等高集度变形受损失效。

图1 长标距FBG 传感器Fig. 1 Long-gauge FBG sensor
与长标距FBG 相对应的宏应变与传统点应变的对应关系如下式所示:

式中,lg为标距长度。
长标距FBG 的另外一大特性就是可串联性,如图2 所示,通过少量光纤就可将多根传感器串联,以覆盖结构表面,实现区域的宏应变传感。此外它还具有抗电磁干扰、质量轻、体积小等优点。

图2 宏应变传感Fig. 2 Macro-strain sensing
1.2 B-WIM 方法理论基础


图3 B-WIM 方法理论推导示意图Fig. 3 Diagram for B-WIM method’s theoretical deduction
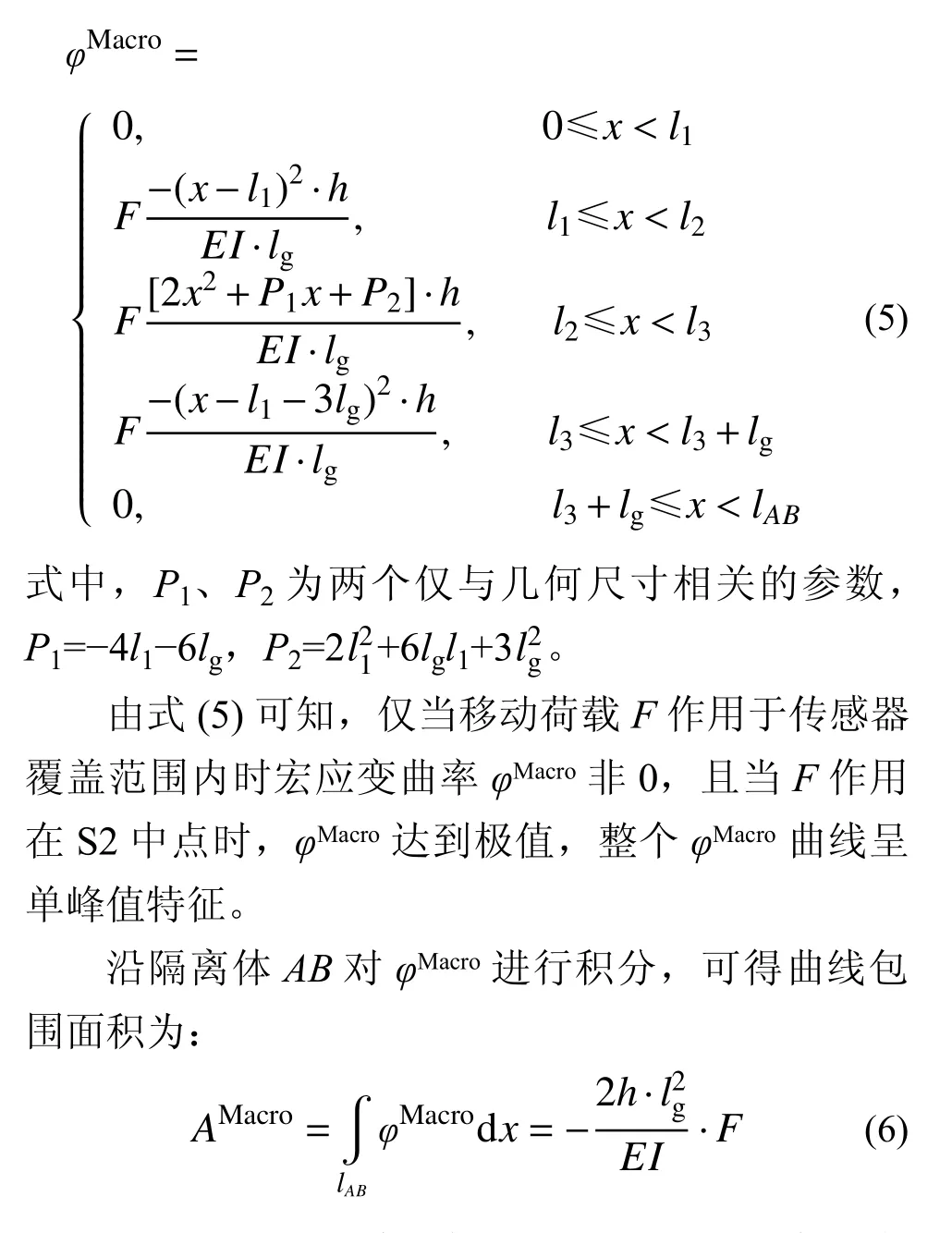
可以发现当传感器标距选定时,宏应变曲率面积仅与上部移动荷载大小线性相关,因而可以基于该指标进行动态称重,将其取为AMacro。
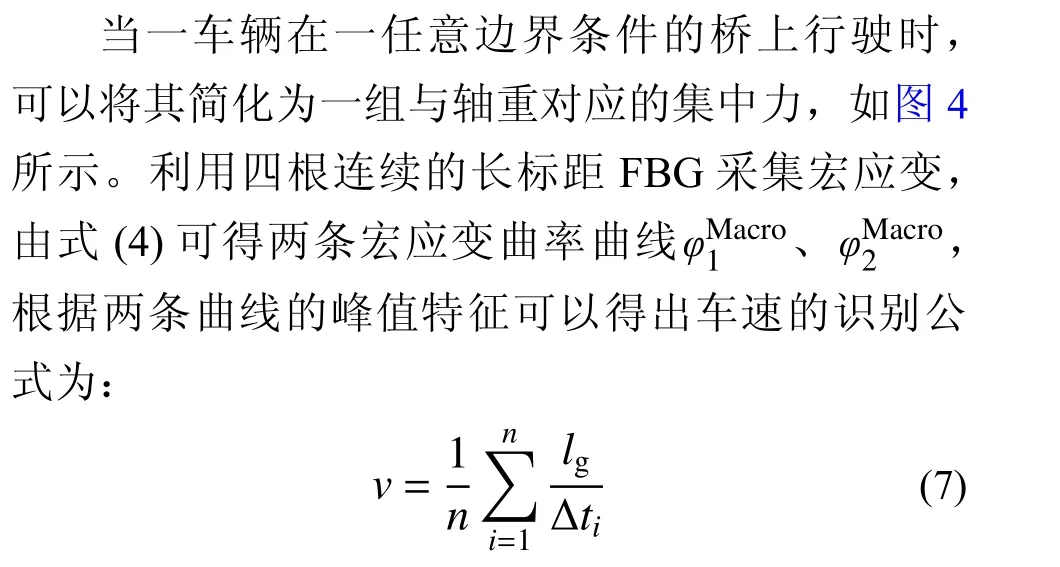
式中:Δti为两条曲线中第i个峰值出现的时间差;n为总峰值数量,等于车辆总轴数,如图4 所示。
随后,基于识别得到的车速v可计算车辆轴距D:

式中,dti为各曲线中第i和i+1 个峰值间的时间差,如图4 所示。

图4 基于宏应变曲率的B-WIM 方法Fig. 4 B-WIM method based on macro-strain curvature
车辆轴重的识别需要用到宏应变曲率面积,理论上可以直接通过AMacro根据式(6)进行反算,但实际桥梁结构刚度难以获得,故需利用一轴重已知的车辆进行参数标定,最终轴重计算式为:

2 车桥耦合模拟
2.1 车桥耦合模拟理论
车桥耦合模拟可准确模拟车辆通过时桥梁结构响应,常用于方法的检验及参数分析。如图5所示,车桥耦合模拟由车辆模型和桥梁模型两部分组成,车辆模型选用多质点自由度模型,动力平衡方程为:

图5 车桥耦合模拟Fig. 5 Vehicle-bridge coupling simulation
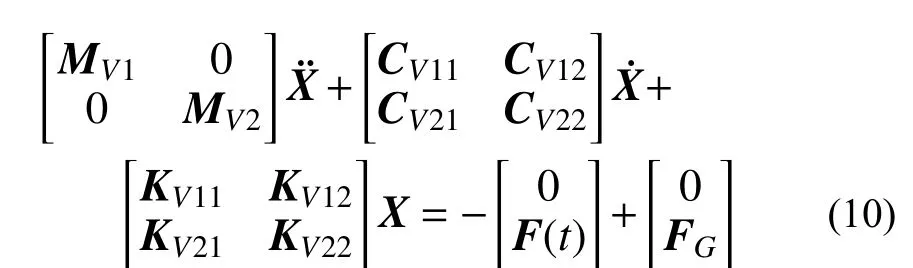
式中:X=[uB, θB,ua1,ua2]T为车辆响应向量;F(t)为车桥接触力;FG为车辆自重;MV、CV、KV分别为车辆质量矩阵、阻尼矩阵和刚度子矩阵,具体形式可参见文献[9]。

式中:D为位移向量;MB、CB、KB分别为桥梁质量矩阵、阻尼矩阵和刚度矩阵,由ANSYS 自动生成;I为插值矩阵,将车桥接触力转化为等效节点荷载。
路面粗糙度由规范规定的位移功率谱密度通过逆傅里叶变换生成,基于不同的粗糙度系数生成不同等级路面粗糙度,计算时代入接触力向量。
求解采用全过程迭代方法,初始设置车辆响应为0,依次通过Newmark-β 法独立迭代求解式(11)和式(12),得到相应的桥梁车辆位移,依次代入接触力向量,直至前后两次迭代桥梁位移结果D(t)收敛[22-23]。
桥梁模型选用有限元模型,其动力平衡方程为:

式中:N(x)为单元形状函数矩阵;L(x)为宏应变插值矩阵,与长标距FBG 布置位置及桥梁单元类型相关。
2.2 室内试验验证
通过一个室内试验来验证编写的车桥耦合模拟程序可靠性。试验中用电机以不同转速牵引车辆模型驶过桥梁模型,在桥梁模型下部安装有长标距FBG,用于宏应变采集。整个模型如图6 所示。

图6 车桥耦合模型试验Fig. 6 Vehicle-bridge coupling model experiment
试验中不同车速下得到的宏应变时程与车桥耦合模拟结果对比见图7,图例中灰线代表试验实测结果,蓝线为模拟值,可以看出两者贴合良好,证明了车桥耦合模拟的可靠性。下面将基于车桥耦合模拟,对提出的B-WIM 方法进行检验。

图7 车桥耦合模拟和试验结果对比Fig. 7 Comparison between vehicle-bridge coupling simulation and experimental results
3 B-WIM 方法可行性验证
3.1 模拟工况
本次模拟选取中小桥中常见的简支梁桥,跨度30 m,截面如图8 所示,B-WIM 传感器分两组布置,分别布置在跨中和1/4 跨处,同时选择两种常用标距长度:0.5 m 和1m 进行比较。

图8 简支梁桥尺寸及传感器布置Fig. 8 Dimension of simply supported girder and arrangement of sensors
基于交通荷载数据统计得到的代表性车型,选定三种高占比车型用于模拟,具体参数见表1,基本囊括不同轴距及轴重[2]。模拟中,依据表中参数生成不同的车辆模型以不同速度驶过桥梁模型,将各组B-WIM 传感器采集到的宏应变代入提出方法识别车辆信息,研究本方法在不同车型、车速、路面粗糙度及传感器状态下的表现。

表1 车桥耦合参数工况Table 1 Parameter scenarios of vehicle bridge coupling
3.2 结果讨论
3.2.1 不同车型识别结果对比
对比提出的B-WIM 方法在三种不同车型下的表现。选用第二组1 m 标距的B-WIM 传感器进行识别,在三种车型以10 m/s 的速度驶过后采集的宏应变时程及计算得到的宏应变曲率如如图9 所示。图例中“Si-10”代表数据由第i 个标距长度为1 m 的传感器得到,“FS”代表经滤波处理后的数据。

图9 不同车型下宏应变曲率结果Fig. 9 Macro-strain curvature results under different vehicle types
可以看出基于宏应变曲率曲线,可准确识别出三种车型的大部分车轴,但对于四轴车的3 号轴、4 号轴,轴距只有1.3 m,识别得到的曲线峰值接近,难以分辨。
在三种车型工况下基于式(7)~式(9),可得到相应的车速、轴距和轴重识别结果,列于表2。从结果可以看出,在三种车型低速状态下车速、轴距识别精度相对较高,误差小于1%,轴重识别结果相对不理想,尤其对于密集群轴,如四轴车的3 号轴、4 号轴,误差最大超过30%,主要由于群轴相对应的宏应变曲率峰部分重叠,难以区分。

表2 三种不同车型下识别结果Table 2 Identified results under three different vehicle types
3.2.2 不同车速识别结果对比
考虑不同车速对本B-WIM 方法识别结果的影响,工况选取二轴车以三种设计速度通过桥梁模型,传感器仍选择跨中第二组1m 标距。三种速度下宏应变响应及宏应变曲率曲线见图10,不同速度下宏应变时程变化明显,但宏应变曲率曲线较为稳定,初步表明本B-WIM 方法在不同车速下使用的可行性。基于本方法得到的各工况车辆信息识别结果列于表3,可发现不同车速下,车辆速度、轴距和轴重的识别精度较为稳定,但整体上轴重识别误差仍相对较大。
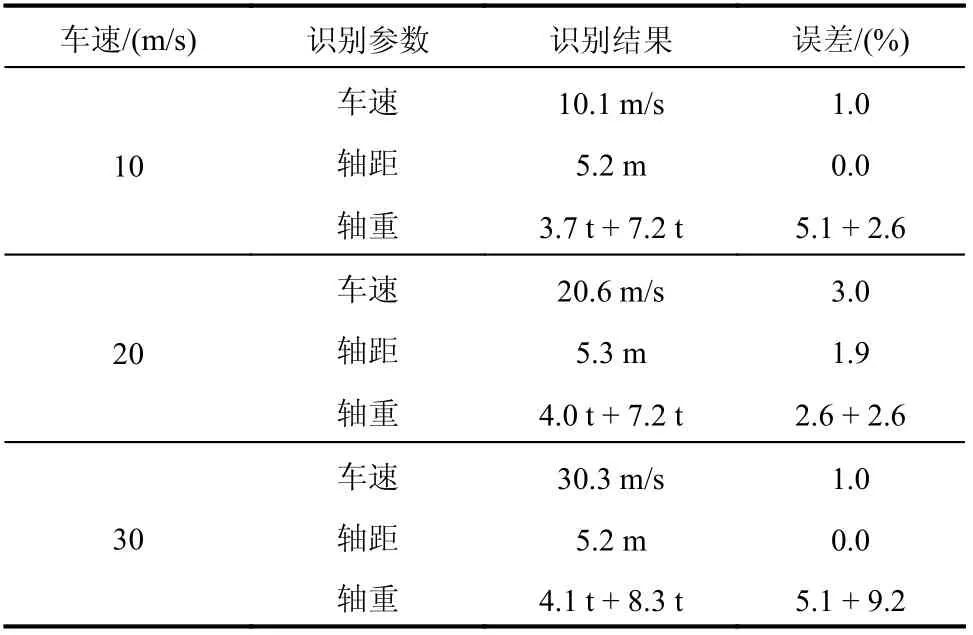
表3 不同车速下识别结果Table 3 Identified results under different vehicle speeds
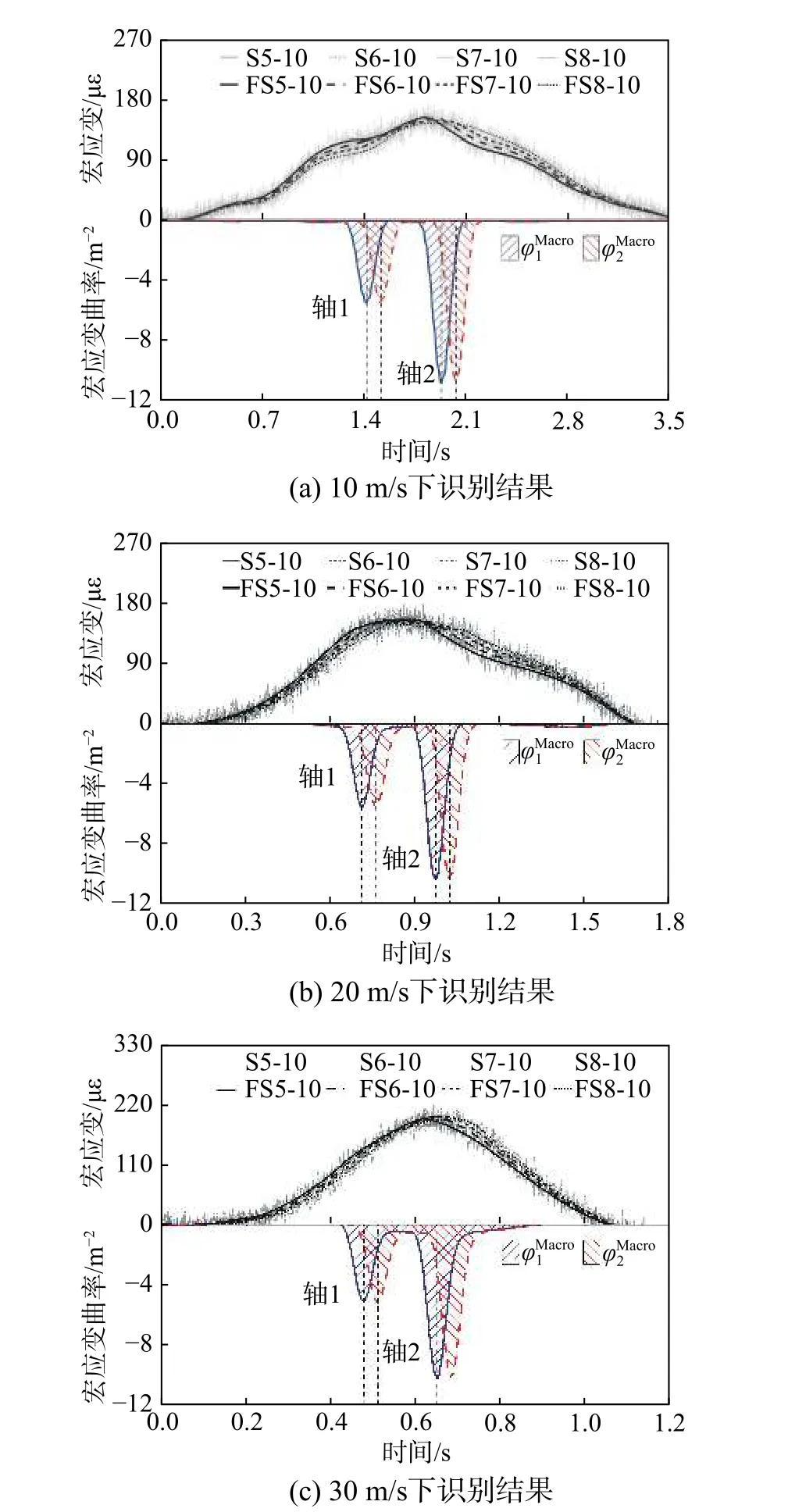
图10 不同车速下宏应变曲率结果Fig. 10 Macro-strain curvature results under different vehicle speeds
3.2.3 不同路面粗糙度等级识别结果对比
选取常见的A、B、C 三级路面粗糙度对本方法的表现进行讨论,车型、车速及传感器情况同第3.2.2 节。模拟得到的不同路面粗糙度下结构宏应变响应和宏应变曲率见图11。由于选择的前三级路面粗糙度状况相对较为良好,对车辆激励下的桥梁响应影响有限。这点从识别结果中也可证实,表4 给出了各级粗糙度下车辆信息的识别结果。可看出路面粗糙度对于车速及轴距的精度影响很小,但对于轴重,随着路面粗糙度恶化,识别误差略有增长。如果路面粗糙度劣化至D 等级、E 等级,影响可能更加明显,未来需要针对该点进行更深入研究。
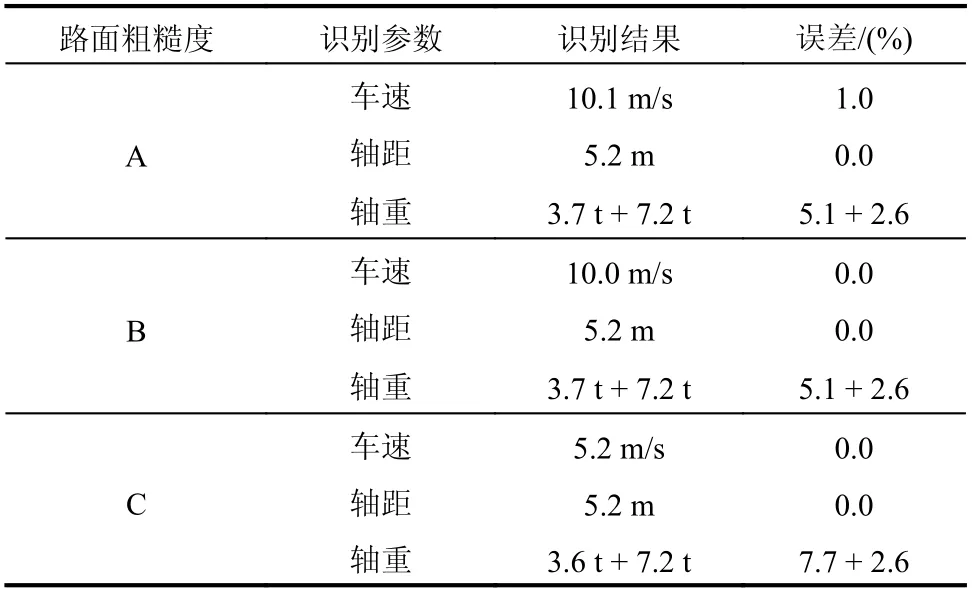
表4 不同路面粗糙度等级下识别结果Table 4 Identified results under different road roughness degrees

图11 不同路面粗糙度等级下宏应变曲率结果Fig. 11 Macro-strain curvature results under different road roughness degrees
3.2.4 不同传感器位置及标距长度识别结果对比
针对四轴车3 号、4 号群轴难以识别的问题,研究本方法在不同传感器位置及标距长度下的表现是否会有所不同。选用四分之一跨和跨中两组B-WIM 传感器,标距长度选择1 m 和0.5 m 两种,车型和车速选为四轴车10 m/s,相应宏应变及曲率时程见图12。可明显看出,随着长标距FBG的标距长度减小,四轴车3 号、4 号轴对应的两个宏应变曲率曲线峰可以被明显区分,有效提升相应轴距、轴重的识别精度。表5 列出了3 号轴、4 号轴轴距和轴重的识别结果。当传感器标距从1 m缩短为0.5 m 时,群轴轴距和轴重的识别精度平均提升了20%左右,成效显著。但缩短标距势必会降低传感器的耐久性,未来需权衡耐久性和识别精度,研究优化本方法配套的传感器标距长度。相较而言,两种不同传感器布置位置对识别结果精度的影响较不明显。因此在应用时,可自由选择桥下地形空间更为方便的位置进行传感器安装,提升系统安装便利性。
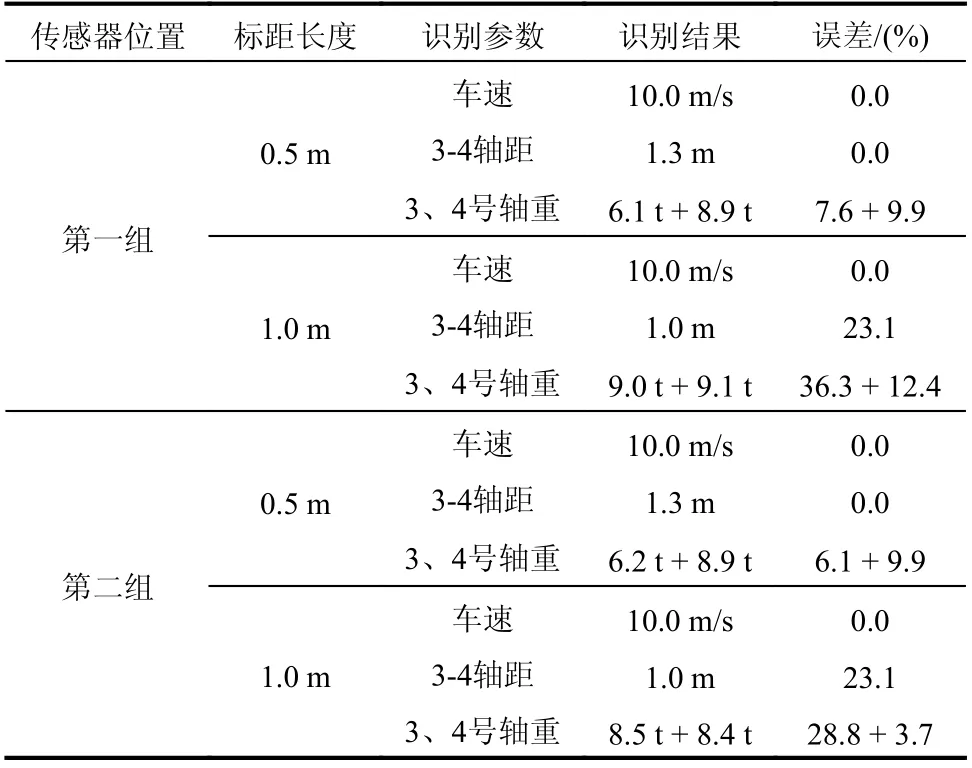
表5 不同传感器位置及标距长度下识别结果Table 5 Identified results under different sensor locations and gauge lengths

图12 不同位置及传感器标距下宏应变曲率结果Fig. 12 Macro-strain curvature results under different locations and sensor gauge lengths
4 结论
本文基于长标距FBG 传感器,通过理论推导提出了核心指标:宏应变曲率,并以此为基础建立了新型B-WIM 方法,可用于识别车辆车速、轴距、轴重等信息。基于试验验证的车桥耦合模拟,对本方法在不同车型、车速、路面不平顺、传感器构型等工况下的表现进行考察,得到以下结论:
(1) 本方法在不同轴数、轴距及轴重的车型下整体表现较为良好,车速和轴距识别精度较高,误差小于1%,相较而言,轴重识别较不理想,误差水平在6%左右。同时当传感器标距长度选择不当时,方法对密集群轴识别精度不佳。
(2) 不同车速及路面不平顺等级对本方法的识别精度影响较小,其中车速、轴距识别精度较为稳定,轴重识别精度有随着车速提升、路面恶化而降低的趋势。未来针对该点需进一步对方法进行研究完善。
(3) 不同传感器位置对本B-WIM 方法的识别结果影响较小,可以为传感器安装提供便利。同时,缩短传感器标距长度可以有效提升对群轴轴距及轴重的识别精度,提升程度平均可达20%左右。缩短标距会降低传感器的耐久性,需要综合考虑耐久性和识别精度,对传感器标距长度进行优化研究。
猜你喜欢
华人时刊(2022年17期)2022-02-15
工程与试验(2021年2期)2021-07-14
哈尔滨铁道科技(2020年4期)2020-07-22
铁道学报(2018年5期)2018-06-21
湖南大学学报·自然科学版(2017年1期)2017-03-09
焊管(2015年4期)2015-12-19
中国铁道科学(2015年2期)2015-06-26
中国铁道科学(2015年1期)2015-06-26
合肥工业大学学报(自然科学版)(2014年1期)2014-12-31
铁道机车车辆(2014年4期)2014-03-23
