基于物联网的RFID室内定位系统设计
2021-11-12 02:17吴超琼张宗谋慕文静韦明旭
智能计算机与应用 2021年9期
吴超琼,张宗谋,慕文静,韦明旭
(广西民族师范学院 数理与电子信息工程学院,广西 崇左 532200)
0 引 言
人类为了不让自己迷失在茫茫大自然中,先后发明了罗盘、指南针等工具,卫星定位的问世,解决了“我在哪里”的问题。但在高度城市化的今天,室内空间越来越庞大复杂,人类战胜了大自然,却在自己构筑的钢筋水泥中迷了路[1-2]。传统的卫星无法在室内进行定位,而人们大部分的时间又在室内度过,相关服务并未大范围普及,可以说室内定位隐藏着巨大商机[3-4]。随着物流行业的发展,物流仓库越来越多,存储的货物数量急速增加,货物出入库频率剧增,人工仓储管理方式严重影响了正常的运行工作效率,随着商品流通的加剧,难以满足仓储管理实时性的要求[5],未来智能无人仓储管理系统,将存在着庞大的市场需求。使用仓储机器人来存取货物是趋势,而仓储机器人能准确的在仓库内指定地点进行货物的存取,这是影响无人仓储发展的一个重要因素。因传统的卫星无法在室内进行定位,仓储机器人势必用到室内定位技术,而定位准确、简单不复杂且成本低的室内定位系统是加速无人仓储发展的关键因素。
目前,国内外有很多关于室内定位技术的研究。如:二维码导航技术、WiFi定位技术、蓝牙室内定位技术、激光雷达的三角定位技术和UWB室内定位技术等等。二维码导航技术是通过摄像头扫描附着在地面的点阵式二维码地标进行导航。应用在物流仓储中,需在机器人的底部和上部分别装有摄像头,成本较高。激光雷达是集激光、全球定位系统和惯性测量装置3种技术于一身的系统,可应用在无人驾驶汽车应用方面,但其成本也很可观。WiFi定位应用于小范围的室内定位,成本虽低,但容易受到其它信号干扰,从而影响定位精度,而且定位器的能耗较高。蓝牙的三角定位功耗高,精度低,在复杂的环境中,稳定性较差。UWB室内定位技术虽然精度高,但需要安置定位基站和定位卡,成本较高。RFID室内定位技术具有非视距传输、识别速度快等特点,用于存储信息的电子标签体积非常小、成本低廉且可重复使用。对于小型的物流仓库需要低成本的、又满足定位需求的机器人来说,使用RFID技术是可以满足的。在此基础上本文设计了一个基于RFID室内定位系统。
1 系统功能描述
室内定位系统由智能室内定位机器人系统、RFID手持终端系统、上位机信息通信系统等3部分组成。以该系统在室内物流分拣上的应用为例进行说明:
RFID手持终端和上位机信息通信系统,通过2.4 G频段的NRF与室内定位机器人进行通信,其向室内定位机器人发送货物起点坐标和终点坐标数据,室内定位机器人向其反馈机器人当前的状态,手持设备将信息显示在OLED屏上,上位机信息通信系统将信息显示在页面上,并显示机器人当前位置。室内定位机器人通过NRF接收任务数据,接收到任务的机器人识别自己当前所在坐标位置,并通过陀螺仪改变其前进方向。当机器人的坐标与货物起点坐标相等时,表示机器人到达货物起点坐标的位置,机器人顶部的伸缩电机伸起,卡住货架底部,再进行路线的规划,到达货物终点坐标后,伸缩电机收起,至此完成一次货运过程。当货运任务结束时,检测当前是否有新的任务,如有任务继续前往新的货运起点,没有则返回等待区等待任务。当机器人电压低于设定电压时,会自动规划路线前往闲置充电坐标点进行充电。系统总体框架如图1所示,室内定位机器人无人仓库方案布置如图2所示。
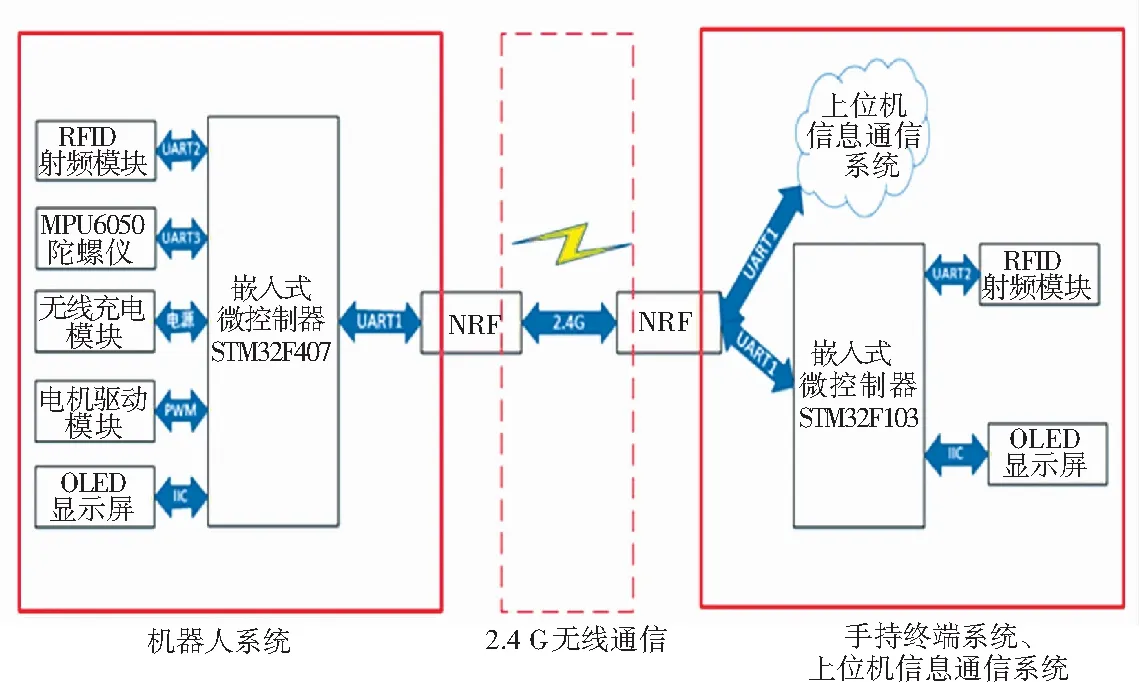
图1 系统总体框图
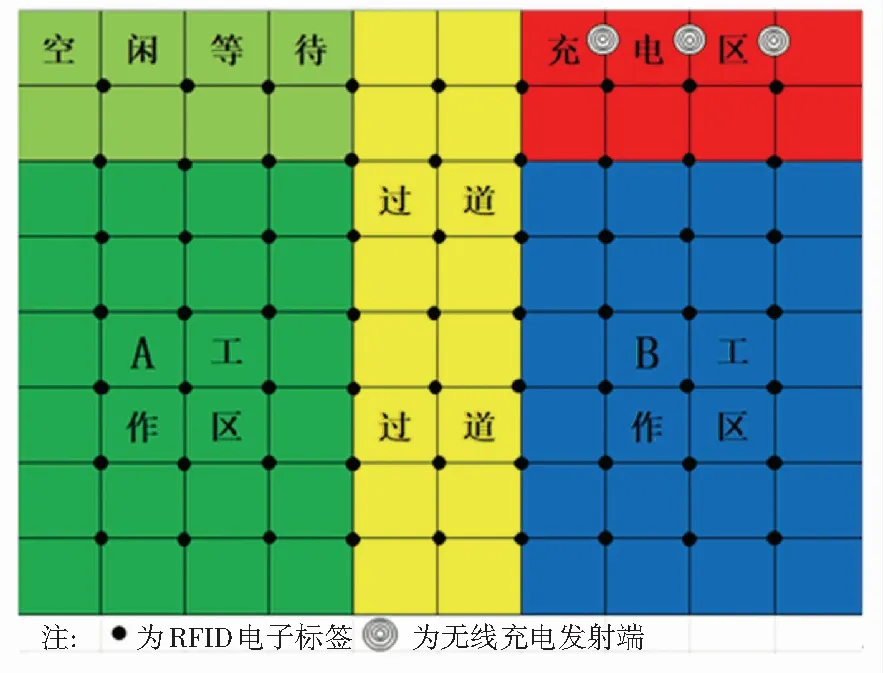
图2 室内定位机器人无人仓库方案布置图
2 硬件设计
本设计使用STM32F407ZET6单片机作为系统主控,用于控制整体系统运行,相比于51单片机和STM32F1芯片有着质的提升。使用FM11RF08射频芯片实现对RFID电子标签坐标的识别;使用TOF10120测距传感器实现机器人避障功能。当规划路径出现了障碍时,机器人等待30 s,如30 s后障碍还未消除,则根据当前坐标重新计算规划路径后前往任务坐标。使用6轴的MPU6050电子陀螺仪获取机器人当前姿态,从而判断机器人车头的朝向,同时能精确控制机器人转向的角度,确保机器人前进方向正确。采用XKT601-02无线充电模块进行机器人的无线充电,其发射端放置于充电地点,供电输入9~12 V电压,接收端放置在机器人底部,当机器人位于充电模式时,即可进行充电。机器人供电采用7.4 V聚合物锂电池,额定容量为15 000 mAh,大容量电池可为小车提供充足的电能,使运行时间大大延长。数据的无线传输使用基于NRF24l01的E34-2G4H20D模块,RFID手持终端系统和上位机信息通信系统,通过2.4 G频段与室内定位机器人进行通信。伸缩电机主要用于当机器人到达运输起始坐标时,通过伸缩电机把放置在坐标上的货物架卡住,运输至坐标终点时,伸缩电机收起,完成货物运输工作。四路电机驱动主要用于控制机器人行走。
3 软件设计思路
该室内定位系统共分为3个部分:智能室内定位机器人系统、RFID手持终端系统、上位机信息通信系统。RFID手持终端系统和上位机信息通信系统通过2.4G频段的NRF模块与室内定位机器人进行通信。
3.1 室内定位机器人系统设计
室内定位机器人通过NRF无线通信方式与手持RFID终端系统、上位机信息通信系统进行数据通信。系统会判断有无接收到任务数据,当接收到任务时,连接在串口2上的射频识别模块,识别当前所在位置,再通过陀螺仪获取当前车头方位姿态,进行坐标的判断。若当前坐标大于任务坐标,控制电机向左转向90°,确保车头朝向前进方向,在进行路线规划时,遵循先走X轴,再走Y轴路线设计原则,逐步向目标坐标靠近。将当前X坐标与货物起点X坐标进行比较,机器人要行驶至与货物起点X坐标一致的位置;再将当前Y坐标与货物起点Y坐标进行比较,机器人要行驶至与货物起点Y坐标一致的位置。当机器人的X、Y轴坐标与货物起点坐标都相等时,表示机器人已到达货物起点坐标位置,机器人顶部的伸缩电机伸起,卡住货架底部,机器人获取当前位置与货物终点坐标进行对比,再进行路线的规划,到达货物终点坐标后,伸缩电机收起,完成一次货运过程。当货运任务结束时,检测当前是否有新的任务,如有任务继续前往新的货运起点,没有则返回等待区等待任务。当机器人电压低于设定电压时,会自动规划路线前往闲置充电坐标点进行充电。室内定位机器人系统运行流程如图3所示。
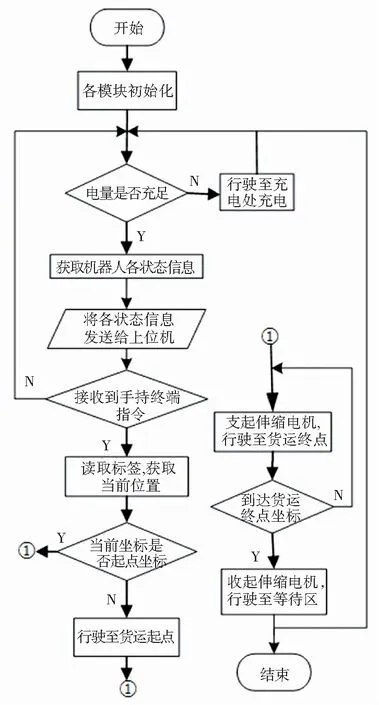
图3 机器人运行流程图
3.2 RFID手持终端系统设计
RFID手持终端系统提供两种模式功能,其一用于录入坐标,其二用于发送任务,可通过KEY5切换模式。当选择模式一时,首先根据场地大小设置坐标,设置完成后,将电子RFID标签放置于手持终端底部,即可自动完成坐标录入。当选择模式二时,系统先判断当前机器人是否有任务安排,当机器人暂无任务安排时,则允许通过NRF无线通信发送方式,以16进制数据格式发送4个字节的坐标数据,包含货物起点坐标,和终点坐标地址发送给机器人。室内定位机器人通过NRF无线通信方式反馈当前位置、电量、状态、角度信息,系统将这些数据显示在OLED屏幕上。手持RFID终端系统运行流程图如图4所示。
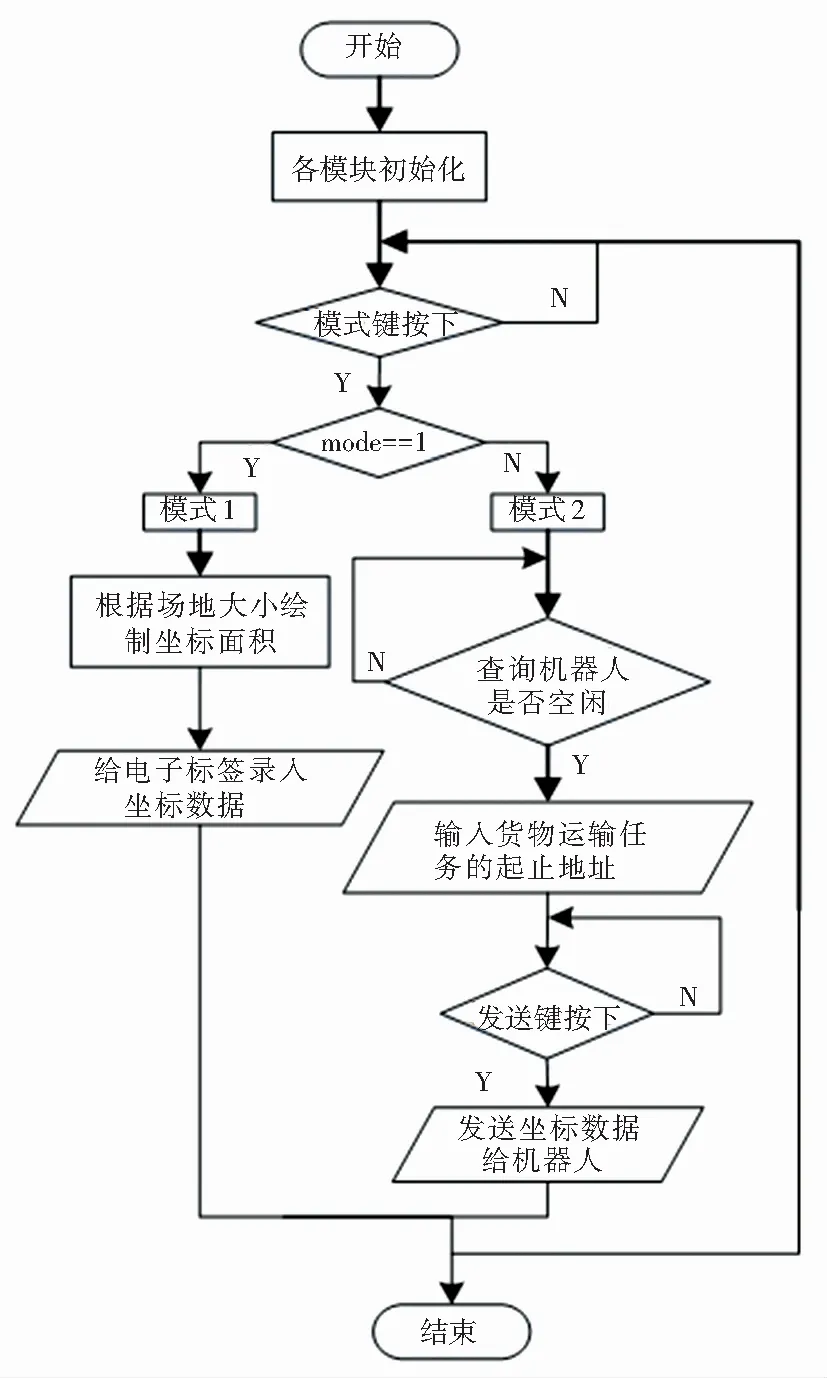
图4 手持终端运行流程图
3.3 上位机信息通信系统
上位机信息通信系统的主要功能,是显示机器人的各个状态信息和机器人当前的位置,也可以给机器人发送任务信息。上位机先判断机器人当前是否处于空闲状态,如处于空闲状态时,则允许通过以NRF无线通信发送方式,以16进制数据格式发送4个字节的坐标数据,包含货物起点坐标,和终点坐标地址发送给机器人。室内定位机器人通过NRF无线通信方式反馈当前位置、电量、状态、角度信息,系统将这些数据显示在接收页面上,将数据进行分割填写于软件底部信息栏,同时在软件的右侧坐标绘制场地地图,并根据机器人反馈的坐标位置显示出机器人的当前位置。上位机信息通信系统运行流程图如图5所示。

图5 上位机运行流程图
4 系统调试
将室内定位系统的3个部分室内定位机器人、手持终端和上位机进行联调,进行各项功能的测试。使用RFID电子标签在室内布局构造场地地图,模拟运输场景。手持终端通过NRF无线通信模块给智能机器人发送运输目标地址的X、Y坐标,机器人接收到目标地址后,机器人搭载RFID读写器,读取地面电子标签信息,得出当前位置,且进行坐标比较,从而准确抵达终点坐标位置。机器人通过NRF模块将机器人的各个状态信息发送给上位机。打开上位机可在上位机的左侧界面看到机器人发送过来的机器人当前位置、电量、状态、角度等信息,在界面右侧的模拟场地地图上显示机器人当前位置。在机器人空闲状态下,上位机的发送窗口输入任务坐标信息,点击发送,上位机就会将任务坐标信息发送给机器人。上位机显示界面如图6所示。
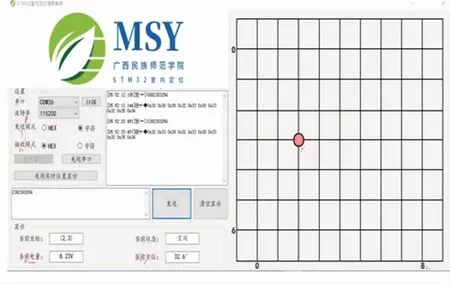
图6 上位机显示主界面
5 结束语
利用室内建筑环境固定易于构建获得地图信息的优势[6],本文提出一种低成本、可靠性好、适合应用在小型物流仓库智能存取货物的基于RFID的室内定位机器人系统。使用RFID标签构造室内地图,机器人模拟存取货物场景,搭载读写器,读取地面RFID标签信息,得出当前坐标位置,并进行坐标比较,从而行驶至终点坐标位置。经过实地测试并与其它室内定位系统比较,本系统结构简单、成本低、可靠性好,满足大小型的物流仓储场景。
本定位系统不仅仅局限于智能无人物流仓储应用,也可将其应用于其它室内场景,如:无人餐厅、无人超市、博物馆等室内场景的建设中,应用方式多样化。
猜你喜欢
海峡姐妹(2020年9期)2021-01-04
艺术启蒙(2020年6期)2020-07-16
小猕猴学习画刊(2019年9期)2019-11-08
智族GQ(2019年9期)2019-10-28
小天使·三年级语数英综合(2017年6期)2017-06-07
科技知识动漫(2016年4期)2016-04-20
汽车观察(2015年10期)2016-04-06
娃娃画报(2009年11期)2009-12-07
现代电子技术(2009年6期)2009-05-31
中学生数理化·中考版(2008年6期)2008-10-30