电动助力转向系统的调制模型预测控制
2021-11-12 03:21张畅石坚
汽车实用技术 2021年20期
张畅,石坚
电动助力转向系统的调制模型预测控制
张畅,石坚*
(广州大学,广东 广州 510006)
为提高汽车转向性能,文章研究新型电动助力转向系统(EPS)控制方法。基于汽车稳态转向系统动力学二次模型与助力特性曲线的分析,并考虑到外部非线性因素对EPS系统的影响,提出一种新型调制模型预测控制(MMPC)方法,来解决目前业界采用PI控制方法的EPS系统难以处理非线性动态响应的问题。通过搭建符合汽车标准的高精度EPS系统仿真模型,按照汽车标准要求验证了所提出方法的可行性,仿真结果表明调制模型预测控制可以完全满足EPS的要求,而且在非线性环境下相较于传统PI控制对辅助电机具有更稳定的转矩控制。
车辆工程;电动助力转向系统;助力特性曲线;非线性;调制模型预测控制
前言
电动助力转向系统(electric power steering system, EPS)是汽车技术发展的热点与前沿技术之一,由于具有高燃油效率、紧凑结构、转动方向易于调整、能够与其他电控系统结合在一起的优点,EPS已逐渐取代液压动力转向系统[1-3]。有限元模型预测控制(finite set model predictive control, FS- MPC)是一种致力于更长时间跨度的最优化控制模式[4],已经被验证在许多电力电子系统中是一种可行策略[5],模型预测控制主要是先将控制系统建模为有限状态系统,再通过负载模型预测每种可能状态的行为,然后定义一个代价函数并表达为对系统状态行为的描述,最后选择使状态函数最小的切换状态。模型预测控制可以考虑复杂系统未来行为和位置、横向加速度、输入转矩等约束来控制输入[6]。已有研究表明,其在复杂环境下自动操作和主动转向具有很高的实用价值[7]。
本文将基于汽车稳态转向系统动力二次模型建立精确EPS非线性驾驶环境,并对助力特性曲线的非线性对系统控制策略的影响进行分析,再将由助力特性曲线产生的参考电流代入FS-MPC策略的代价函数中,选择最优电压向量,再结合插入电压零向量的方法实现对辅助PMSM电机的新型调制模型预测控制(modulation model predictive control, MMPC)。同时通过SIMULINK仿真验证其可行性,并将MMPC控制与PI控制框架下的EPS在处理助力特性曲线非线性问题的控制结果进行比较。
1 EPS系统模型
1.1 汽车稳态转向系统
本节提出并分析研究使用的EPS系统基本动态模型如图1所示。PMSM通过齿轮减速机构与转向杆相连,转矩传感器位于方向盘与转向杆之间,为了方便进行系统建模将汽车整体的转向输出等价于汽车轮胎间联动轴的横向移动,它由齿轮和转向齿条组成。
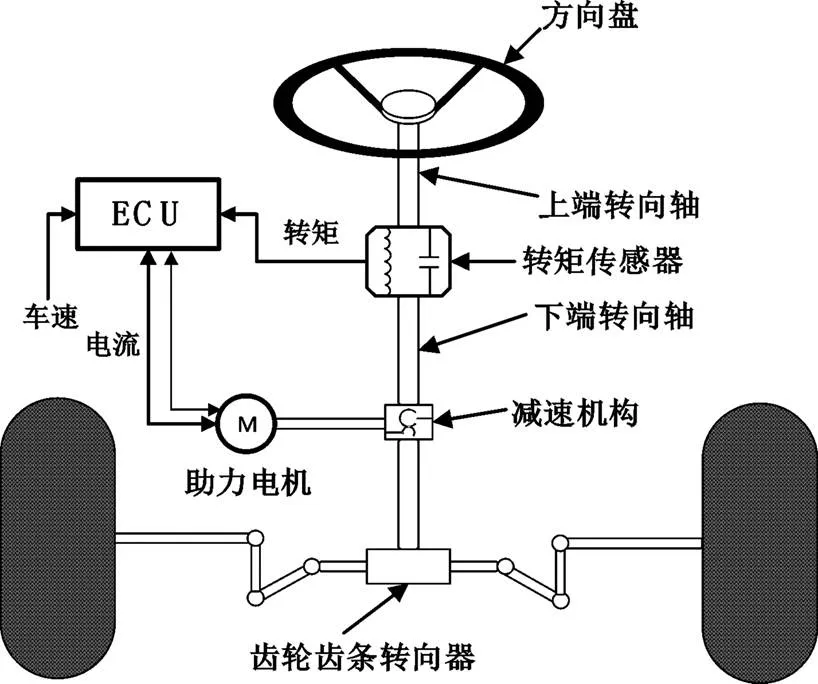
图1 EPS动态模型
根据牛顿第二定律, EPS机械系统可表示为式(1)所示的二阶微分方程形式[8]:

其中:
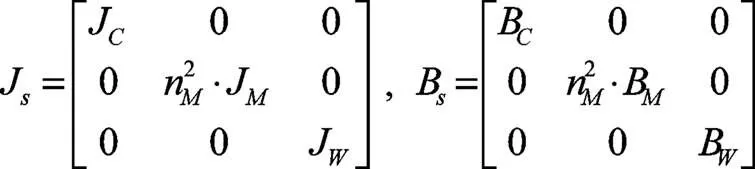
式中:C、M、W分别为方向盘、PMSM、齿轮-转向齿条的转动惯量;C、M、W分别为方向盘、PMSM、齿轮-转向齿条的阻尼系数;C、ts、W分别为方向盘、转矩传感器、齿轮-转向齿条的刚性系数;、C、P、为方向盘、上端转向轴、下端转向轴、前轮转动角度;a为PMSM转矩;W为轮胎负载转矩;M为减速装置传动比;W为齿轮-齿条的传动比;F、M、W分别为转向轴、PMSM、轮胎模型的动摩擦力。
为了更好地反映EPS系统的数学建模,需考虑汽车稳态转向情况下的车辆动力学二次模型,模型状态方程如式(2)所示[9]:

其中:
式中:为整车质量;z为汽车轮胎转动惯量;f为质心到前轴的距离;r为质心到后轴的距离;f为前轮侧偏刚度;r为后轮侧偏刚度;为质心速度;为质心侧偏角;r为横摆角速度。
为了描述轮胎的非线性侧偏特性,并且降低模型复杂度,提高运算速率,本文采用常摩擦系数轮胎模型,因此轮胎负载转矩由式(3)表示:
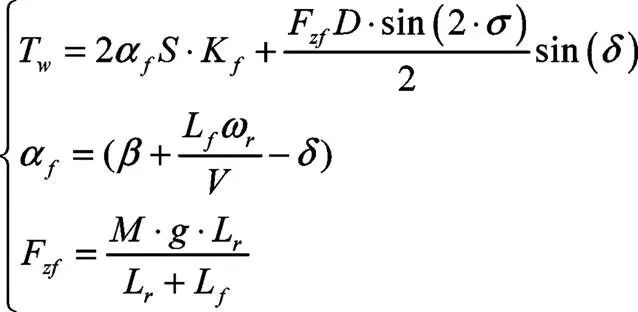
式中:为轮胎侧向滑移率;为轮胎与地面接触面宽度;为轮胎侧偏角;为重力加速度。
2 所提出模型预测控制策略
由于PMSM以其体积小、功率密度大、转矩脉动小及使用寿命长等优点,很好地满足了EPS控制系统中辅助电机的性能要求。驱动PMSM电机将采用如图2(a)所示的2L-VSL电源电路。其中2L-VSL电路总共有八种开关状态,即对应八个定子电压向量,分别是六个动向量和两个零向量,如图2(b)所示。
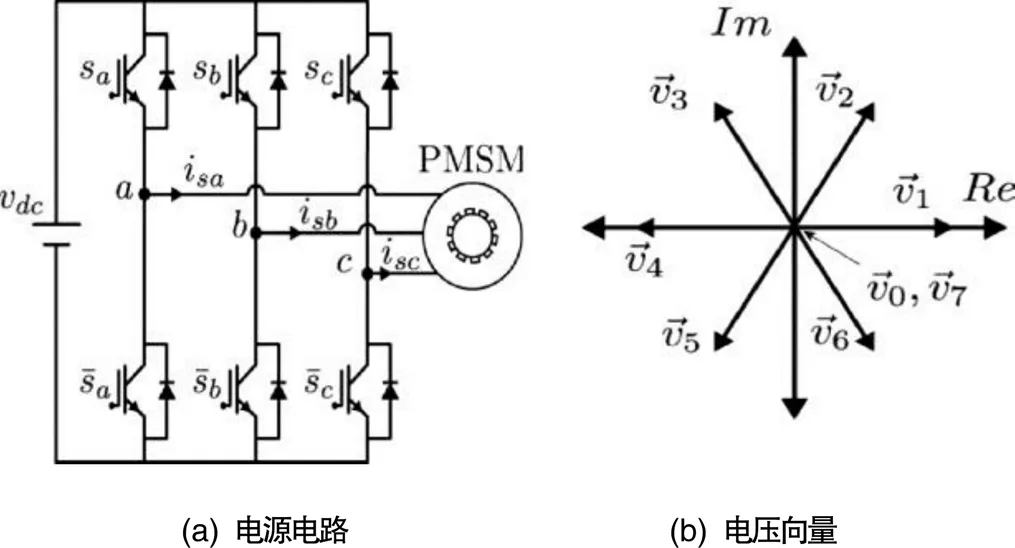
图2 两级电压源逆变器
将静态三相abc坐标系电压向量转换到二相dq旋转坐标系中,在任何瞬时情况下均满足:


式(5)是PMSM在旋转d-q轴坐标系中电压与电流之间的关系式:
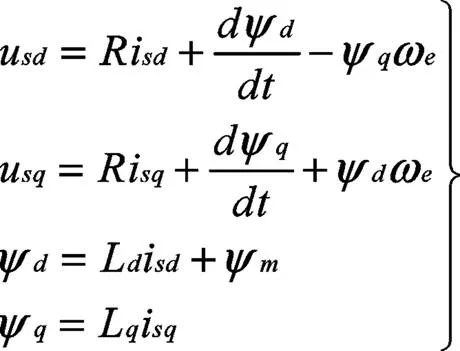
由式(5)可得到式(6):
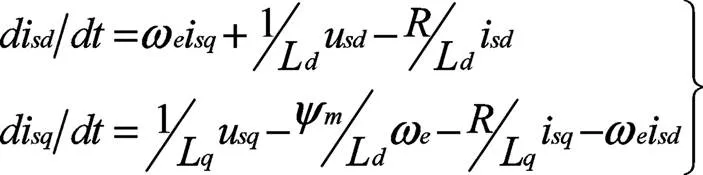
值得注意的是,模型预测控制的实现需要对连续方程式进行离散化,采用欧拉离散法,可得-轴预测电流:
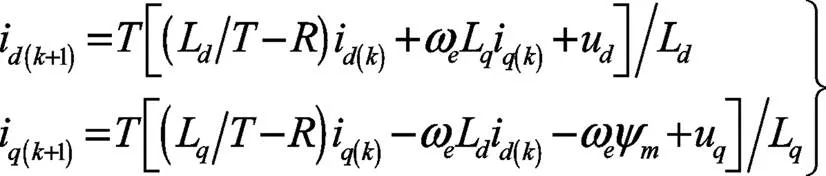
式中i()和i(k+1)分别是基于系统模型+1时刻的-轴预测电流;i(k)和i(k)分别是时刻-轴电流;为控制周期。在每个运算周期内,通过测量的当前定子电流、转子角度结合公式(7)计算得到八个定子电压所对应的预测电流,再结合式(8)所示的代价函数(cost function)获得代价函数值最低所对应的最优定子电压。
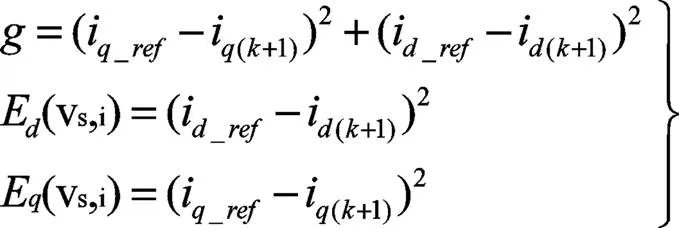
式中sd_ref和sq_ref分别是通过第二部分的助力特性曲线得到的-轴参考电流。
其中所期望达到的电压状态#与八种定子电压状态如图3所示,其中代价函数可由图3中的X#与X(+1)之间的距离或式(9)表达:
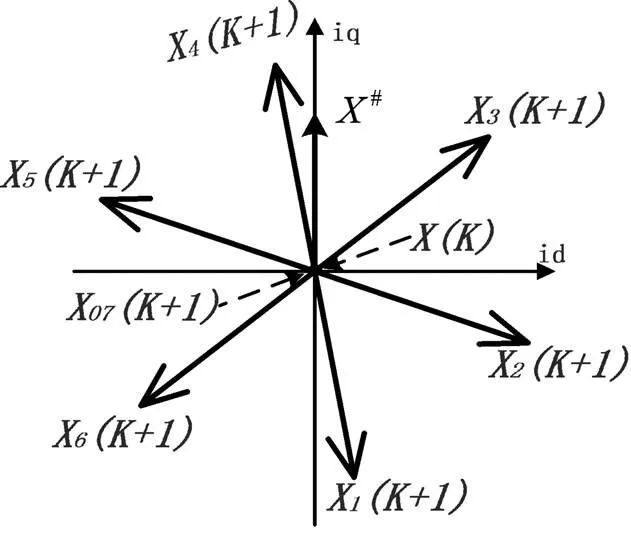
图3 MPC的状态空间展示

3 仿真验证分析
3.1 基于MMPC策略的EPS系统
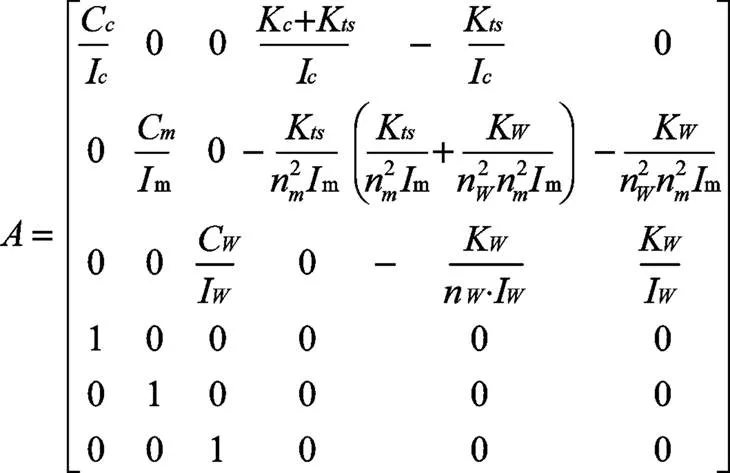
本文中使用的EPS状态方程采用方向盘转角作为输入,因此EPS状态方程表示为:
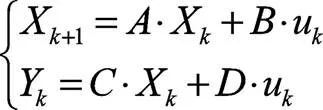
其中:
首先验证MMPC策略对EPS控制的可行性,其中SIMULINK仿真主要参数如表1所示。
表1 仿真主要参数取值
参数取值 方向盘转动惯量JC/(kg·m2)2e−4 PMSM转动惯量JM/(kg·m2)3e−4 齿轮-齿条转动惯量JW/(kg·m2)1.3 方向盘阻尼系数BC/(N·m·s/rad)0.55 PMSM阻尼系数BM/(N·m·s/rad)6.9e−4 齿轮-齿条阻尼系数BW/(N·m·s/rad)25 方向盘刚性系数KC/(N/m)1 000 转矩传感器刚性系数Kts/(N/m)120 齿轮-齿条刚性系数KG/(N/m)20 000 减速装置传动比nM17 齿轮-齿条的传动比nW16 整车质量M/kg950 汽车轮胎转动惯量IZ/(kg·m2)1 500 质心到前轴的距离Lf/m0.86 质心到后轴的距离Lr/m1.5 前轮侧偏刚度Kf/(N/m)34 000 后轮侧偏刚度Kr/(N/m)34 000 PMSM d轴电感Ld/H0.003 PMSM q轴电感Lq/H0.003 PMSM 电阻R/Ω0.36
按照国际ISO 13674试验标准使用正弦输入来对方向盘的转向轻便性和操纵稳定性进行评价。在车速100 km/h ,0.2 g侧向加速度范围内连续正弦试验,方向盘转角幅值一般在2.5°~10°之间,频率在0.2 Hz~0.5 Hz之间时,通过方向盘转角、方向盘力矩、侧向加速度三者之间的关系来描述中心区的轻便性和操纵稳定性[10]。
本次实验仿真中设置:方向盘转角取幅值为5°,频率为0.5 Hz的正弦波形作为系统输入。
根据转向感觉的主观评价方法,大多数驾驶员认为2 N·m~3 N·m的方向盘力矩是比较舒适的,且在角度范围内保持在相同的水平[10]。图4是EPS系统在没有辅助电机控制及有MMPC控制辅助电机两种情况下原地转向试验的方向盘力矩对比,当EPS辅助电机在MMPC策略控制助力下,方向盘力矩在全方向盘转角范围内基本维持在2 N·m~3 N·m之间,相较于没有辅助电机助力的情况,大大减轻了驾驶员的操作负担,符合汽车转向轻便性设计要求。
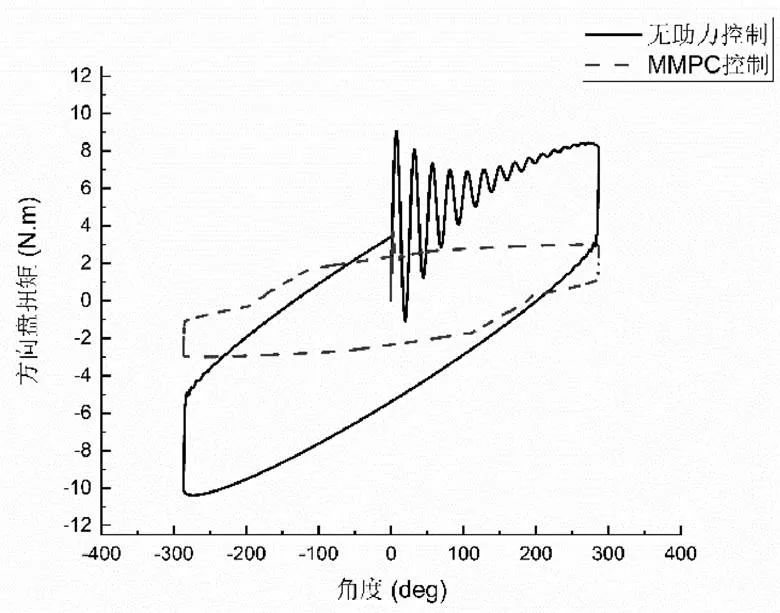
图4 转向试验无助力控制及MMPC控制方向盘角度-力矩对比
根据[10]得知,汽车在行驶过程中方向盘扭矩梯度的理想取值范围为1.96 N·m/(m/s2)~7.84 N·m/(m/s2),由图5可得侧向加速度为0 m/s2时的转向盘扭矩梯度为5.016 N·m/ (m/s2),侧向加速度为1 m/s2时的转向盘扭矩梯度为1.214 7 N·m/(m/s2),满足理想方向盘扭矩梯度设计要求,并且从图5可以发现MMPC策略具有良好的中心区操纵稳定性。
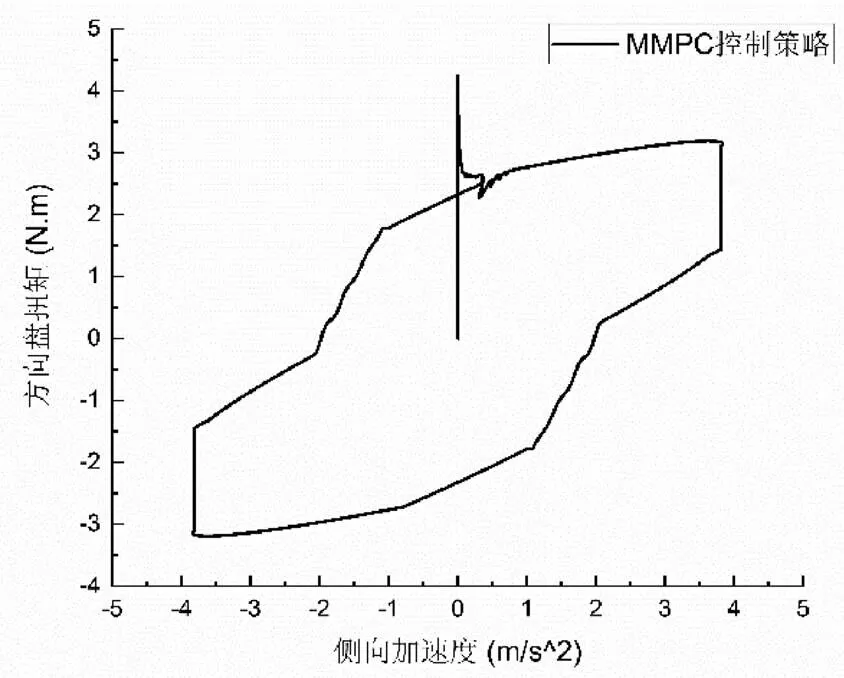
图5 转向试验MMPC控制侧向加速度
3.2 MMPC与PI控制性能对比
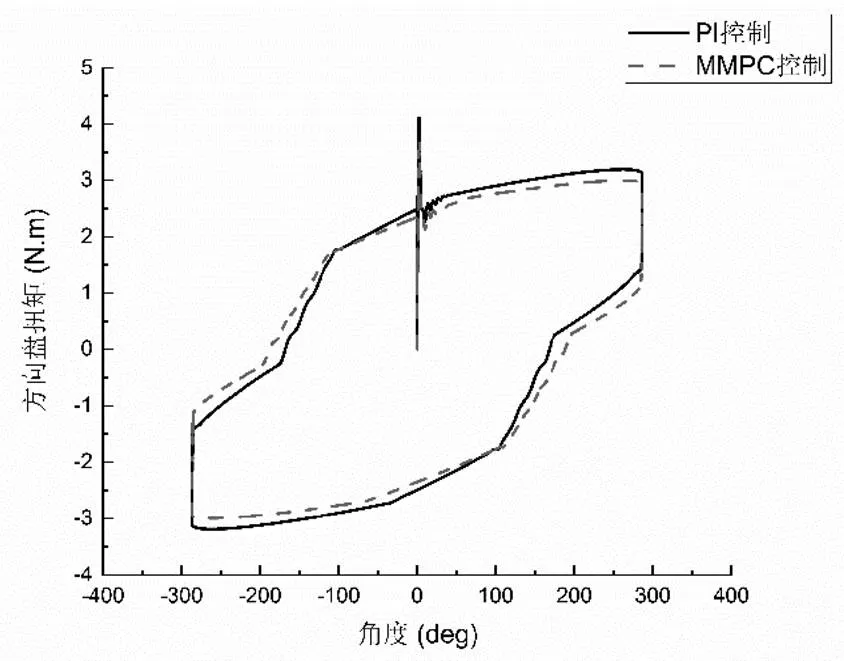
图6 转向试验PI控制和MMPC控制方向盘角度-力矩对比
关于MMPC策略相较于PI控制策略对整个EPS系统性能提升,主要体现在对辅助电机扭矩控制具有更好的控制性能,并且对整个EPS系统的转向轻便性有一定的提升。
从图6可以发现,MMPC控制辅助电机与PI控制辅助电机在相同条件下,当EPS辅助电机在MMPC策略控制助力下,方向盘力矩在全方向盘转角范围内基本维持在2 N·m~3 N·m之间,相较于PI控制辅助电机助力的情况,更贴近汽车转向轻便性设计要求[11]。
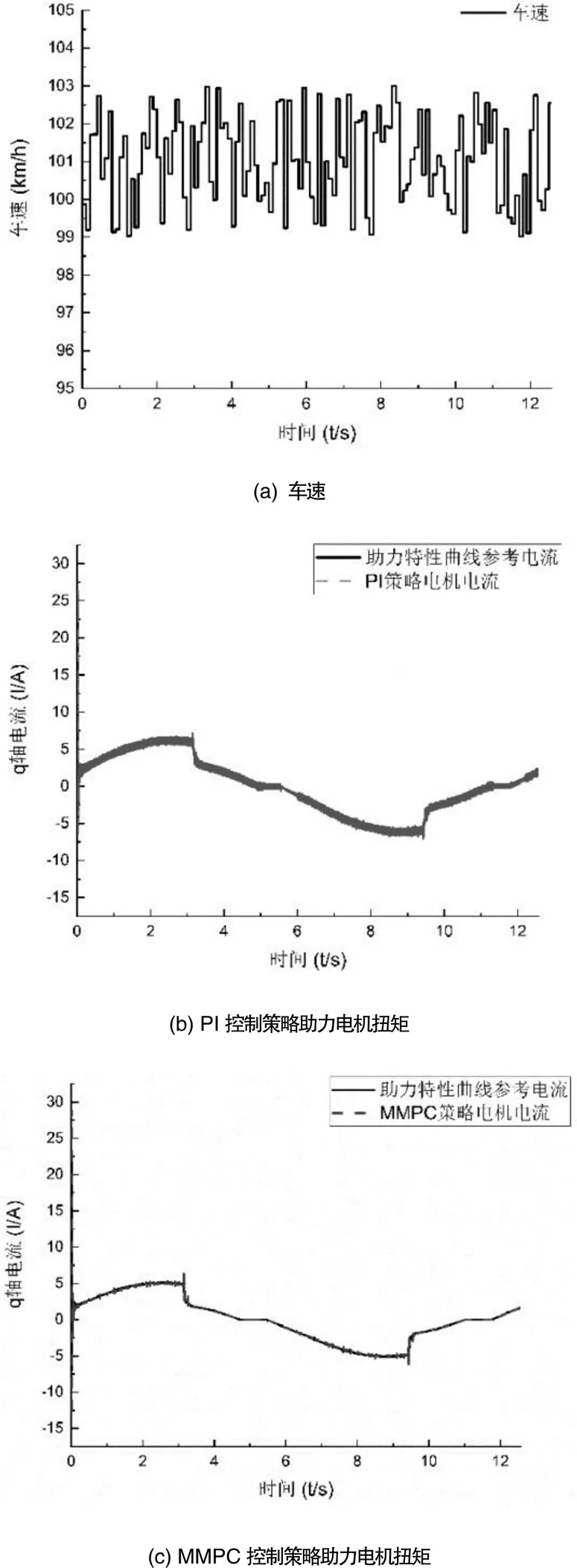
图7 变速转向试验PI控制和MMPC控制EPS性能对比
图7是在SIMULINK仿真中设置0~4*pi秒内车速在100 km/h上下随机波动1 km/h~3 km/h来模拟实际非线性因素所造成的影响,如图7(a)所示。图7(b) 是PI控制的助力电机轴电流输出情况,图7(c)是MMPC控制的助力电机轴电流输出情况。可以发现,当车速改变时,MMPC控制相较于PI控制框架下对PMSM转矩控制更稳定,不仅提高了辅助电机快速响应能力,并且减少助力扭矩波动。当伴随车速变化,即助力特性曲线出现非线性因素对EPS产生影响时,助力特性曲线参考轴电流将呈现非线性,此时PI控制框架下的EPS因为PI控制本身参数固定不变的原因,对辅助电机的扭矩控制将会出现大幅度的扭矩波动,而MMPC控制在面对助力特性曲线非线性情况时,对PMSM的转矩控制依旧能够实现稳定控制。
4 结束语
针对具有非线性因素的EPS中对辅助电机PMSM转矩控制框架,本文提出MMPC控制策略来解决PI控制因自身控制参数难以改变等问题。通过Simulink仿真搭建符合汽车标准的高精度EPS框架,将MMPC控制策略与PI控制策略加入PMSM转矩控制回路中,分别对两种不同控制策略下的EPS进行变速转向仿真试验。仿真结果验证了MMPC控制策略的可行性,并且对MMPC控制策略与PI控制策略下的EPS转向轻便性试验进行了比对,其中MMPC控制策略下的EPS具有更贴近驾驶员转向习惯的助力扭矩控制。仿真结果同时表明MMPC控制相较于PI控制在变速驾驶环境下对PMSM转矩控制具有更少的转矩波动,并且在处理非线性EPS时具有更稳定的转矩控制性能。
[1] H.Wi, G.Jo, J.Park, et al.Effect of Type of Power Steering System on Vehicle Fuel Economy[C].KSAE Annual Conference Proceedings, 2006:733-738.
[2] Chen X, Yang T, Chen X, et al. A Generic Model-Based Advanced Control of Electric Power-Assisted Steering Systems[J].IEEE Tran- sactions on Control Systems Technology, 2008, 16(5):1289-1300.
[3] Z.He, M.Gu.Dynamic Research on Control Strategy of Electric Pow- er Steering System[C].SAE Technical Paper,2012.
[4] P.Cortes, M.P.Kaz mierkowski, R. M. Kennel, et al.Predictive control in power electronics and drives[J].IEEE Trans Ind Electron,2008 (12):4312-4324.
[5] S.V azquez, J. I.Leon, L.G. Franquelo, et al. Model predictive control: A review of its applications in power electronics[J].IEEE Industrial Electronics Magazine, 2014(1):16-31.
[6] Y. Zhang, H. Yang and B. Xia.Model-Predictive Control of Induction Motor Drives:Torque Control Versus Flux Control[J].IEEE Transac- tions on Industry Applications,2016(4):4050-4060.
[7] Z. Ercan,A.Carvalho, M. Gokasan,et al. Modeling, Identification, and Predictive Control of a Driver Steering Assistance System[J]. IEEE Transactions on Human-Machine Systems,2017(4):700-710.
[8] A.Marouf, M.Djemai, C.Sentouh, et al.A New Control Strategy of an Electric-Power-Assisted Steering System[J].IEEE Transactions on Vehicular Technology ,2013(7):3574-3588.
[9] 汪永志,汪伟,张兰春,等.汽车动力学参数的相对灵敏度分析[J].机械设计与制造,2018(01):19-21.
[10] 雍文亮.面向驾驶品质的汽车电动助力转向方法的研究[D].长春:吉林大学,2019.
[11] 中华人民共和国工业和信息化部.汽车操纵稳定性试验方法:GB/ T 6323—2014[S].北京:中国标准出版社,2014.
Model Predictive Control Method for Electric Power Steering System
ZHANG Chang, SHI Jian*
( Guangzhou University, Guangdong Guangzhou 510006 )
In order to improve the steering performance of vehicles, novel electric power steering (EPS) control method is the focus of this study. Based on vehicle steady state steering system dynamics of quadratic model and analysis of assist characteristic curve, a novel predictive control method (MMPC) was proposed and studied. This novel method can solve the problem of EPS multiple nonlinear dynamic response compared with the poor performance of traditionally adopted PI control method of EPS with its nearly fixed setup of PI parameters. High fidelity EPS system model satisfies automotive standards was established to verify the presented method. The simulation results show that the MMPC can be well used on an EPS system and has a more stable torque response than the traditional PI control method under nonlinear working environ- ment.
Vehicle engineering;Electric power steering system;Assist characteristic curve;Nonlinear influence;Modulation model predictive control
U463.44
A
1671-7988(2021)20-141-06
U463.44
A
1671-7988(2021)20-141-06
10.16638/j.cnki.1671-7988.2021.020.035
张畅(1994—),硕士研究生,就读于广州大学,研究方向:底盘汽车电子执行器控制方法研究。
石坚(1982—),男,副教授,博士,就职于广州大学,研究方向:电动汽车及其关键零部件研究。
国家自然科学基金项目(51507097)。
猜你喜欢
汽车实用技术(2022年15期)2022-08-19
舰船科学技术(2022年11期)2022-07-15
当代水产(2022年6期)2022-06-29
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2022年2期)2022-04-26
汽车实用技术(2022年7期)2022-04-20
新传奇(2018年47期)2018-08-09
电机与控制学报(2018年9期)2018-05-14