基于校园不确定性道路场景的AEB与ACC联合控制研究
2021-11-12 03:21高源王昌龙唐晓峰翁佳昊高安宋彦琳
汽车实用技术 2021年20期
高源,王昌龙,唐晓峰,翁佳昊,高安,宋彦琳
基于校园不确定性道路场景的AEB与ACC联合控制研究
高源,王昌龙,唐晓峰,翁佳昊,高安,宋彦琳
(扬州大学机械工程学院,江苏 扬州 225127)
为实现自动驾驶车辆在非结构化道路场景中的安全行驶,侧重于校园道路的不确定性环境研究了车辆紧急制动(AEB)与自适应巡航(ACC)的联合控制方法。文章设计了PID控制器,进行了基于校园道路的实车实验,实验结果表明该控制器响应迅速,能够在车辆巡航时根据前方路况紧急制动,保证了在不确定性道路场景中自动驾驶的安全性。
自动驾驶车辆;紧急制动;自适应巡航;PID
前言
近年来国内外兴起了对于自动驾驶技术的研究热潮,一套完整的自动驾驶系统主要包括以下四个主要工作阶段:感知、决策、控制、执行。自动驾驶任务对于整套系统提出了很高的安全性要求,每个工作阶段必须同时高效稳定地运行才能让整车具有最优的表现[1]。基于标准公路设计的自动驾驶系统具有局限性,不适用于校园道路。校园的道路属于非结构化道路,与标准公路相比,其环境差异在于:缺乏道路交通标线、缺乏道路交通标识牌和红绿灯、道路的规范程度明显不同、道路的对空情况可能有大的不同、车辆运行速度不同带来的差别[2]。由于以上的差异,自动驾驶车辆的感知和决策算法需要进行调整。同时校园道路中行人大规模的无规律行走,各类车辆的无序停放以及跨道行驶等情况,都对现有的自动驾驶车辆的运动控制带来极大挑战,控制层算法也需要大幅度的调整,才能符合在非结构化道路安全行驶的要求。
为解决上述问题,本文针对自动驾驶汽车的决策层与控制层,对校园场景内的低速行驶的自动驾驶汽车开展了ACC与AEB联合控制的研究,为决策层设计了行为准则系统框架,基于该框架在控制层设计了PID控制器,进行了实车实验,为非结构化道路自动驾驶汽车的安全行驶技术的进一步研究与应用提供技术和理论参考。
1 决策逻辑
本文根据校园道路场景下,行人无规律行走,车辆前方路具有不确定性的特点,为自动驾驶车辆的定速巡航、自适应跟车与紧急制动三种行为设计了决策逻辑,其决策框架如图1所示。
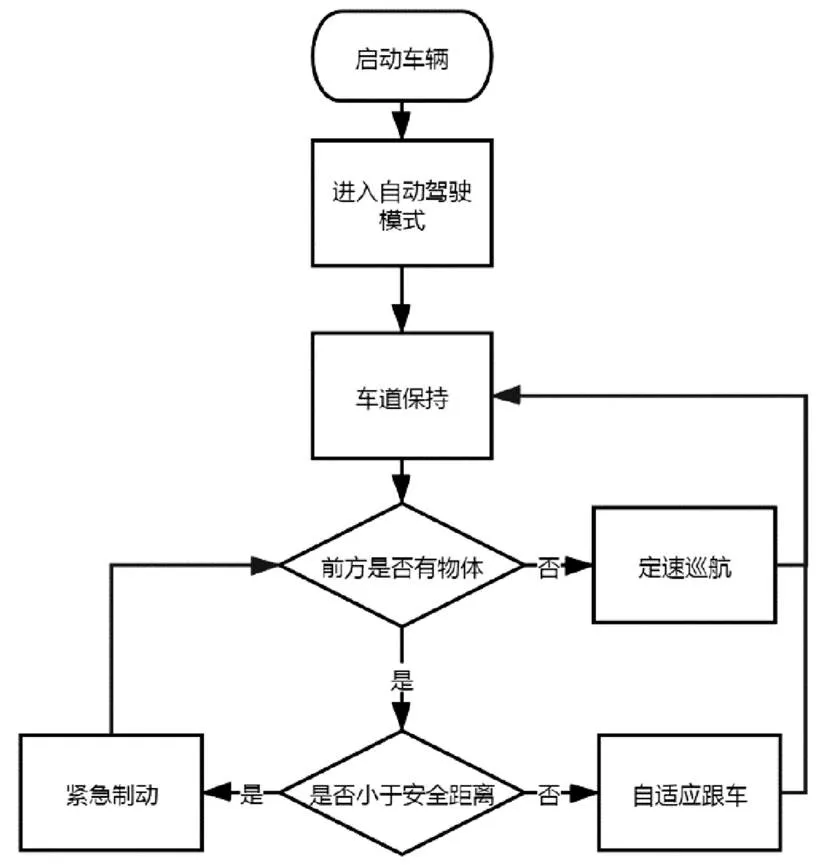
图1 行为准则系统框架图
在决策层中,紧急制动行为具有最高优先级,车辆在自动驾驶过程中,一旦车前方有障碍物且障碍物与本车距离小于安全距离,车辆立即停止。在ACC工况下,前车与本车距离大于安全距离后本车重新切换至自适应跟车模式,车辆的跟据前车的车速和距离完成跟车行为。在AEB工况下,车前方的行人离开道路区域后,本车切换至定速巡航或者自适应跟车模式。这样的决策逻辑安全性冗余很充足,只要车辆前方一定距离内出现障碍物,车辆就立即停止,直到路面净空后才继续前进。
2 控制器设计
实际车辆的控制问题分为车辆的纵向控制和横向控制。纵向控制是指在车辆行驶方向上的控制,通过控制实际车辆的加速踏板和制动踏板实现对车辆速度与相对距离的控制。横向控制是指对于车辆跟踪道路轨迹的控制,实质上也就是对于车辆转向系统的控制[3]。
本文设计控制器的主要目标为:
(1)设计横向控制器使车辆紧急制动时车身保持在车道线内,不发生横向偏移。
(2)设计纵向控制器,实现车辆遇行人紧急制动;同时,在自适应跟车时保持车距,控制车速。
AEB系统启动后,正在行驶的车辆如果方向盘未回正会导致车辆的横向偏移甚至车身偏离车道线,不满足安全性要求。与此同时,ACC系统也需要满足车辆始终保持在车道内行驶。现有的车辆ACC与AEB技术都是基于纵向动力学模型实现,本文建立横向动力学模型,对车辆行驶轨迹加以控制,防止AEB与ACC系统运行时车辆偏离车道线行驶。
2.1 运动学模型
本文的纵向运动学模型,考虑车辆前方突遇行人的制动控制与自适应跟车情况下的制动控制,建立纵向运动学模型如图2所示。
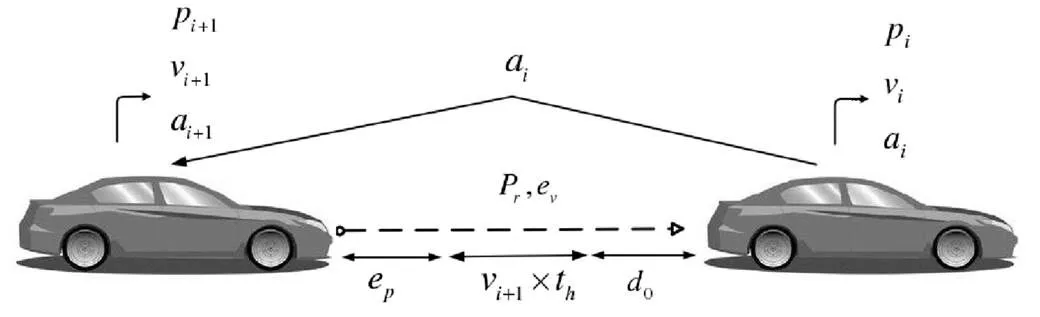
图2 纵向跟车模型[4]
应用最广泛的安全车距控制策略主要有固定时距与可变时距这两类,为使控制器结构简单,提高实车代码运行速度,本文选取固定时距策略,固定时距的原理如下[5]:
=0(v−v1)+tv1+0(1)
式中:0为最小安全车距;为期望车距;v,v+1为前车与本车的车速。
假设前车与本车的车速相同,可将式化(1)简得:
=tv1+0(2)
紧急制动区别于常规制动,在紧急制动的控制中,只考虑安全性,不考虑乘客的舒适性,当满足AEB触发条件时,将在极短时间内完成制动。但自动驾驶车辆的上位机控制指令传递到下位机执行机构有延迟,需要在最小安全距离0的基础上需增加由于信号传输迟滞形成的制动距离,可得AEB系统的触发条件:
D=0+τv1(3)
式中:D为AEB触发设定距离;为传输信号迟滞时间。
本文实车实验平台实测的信号传输迟滞时间最大值为0.5,包括了从感知层发现前方行人到线控底盘开始执行刹车指令的全过程,考虑到车辆安全性需要冗余,实际的实车实验将设定为1 s。
2.2 动力学模型
在二自由度运动学模型的基础上,建立车辆动力学模型,如图3所示。
车辆动力学模型表示为[6]:
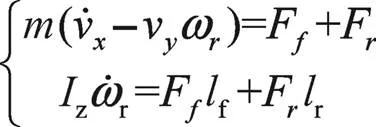
式中:m为车辆质量;vx、vy表示车辆质心处的纵向速度和横向速度,其中,vy=vxβ;β为质心侧偏角;ωr为车辆质心的横摆角速度;lf、lr分别表示前后轴到质心的距离;Ff、Fr分别表示前后轮所受的侧向力,该值为前/后轴单侧轮胎所受侧向力的两倍;Iz为横摆运动的惯性力矩。
对模型的线性化主要是在假设车辆运动过程中部分角度参数较小的情况下进行[7]。考虑轮胎侧偏力、路面的附着系数,进行线性化后的车辆模型为[3]:



2.3 控制器
ACC与AEB的联合控制采用同一台实验车,控制器的主程序包括车道保持、自适应巡航与紧急制动的子程序。车辆的感知层时刻保持对前方路面情况的监控,作用是采集前车相对距离和前车车速。在自适应跟车情况下,若车距在10 m以上,则本车保持恒定车速10 km/h行驶,当前方车速降低,车距小于10 m后,本车进行制动减速,控制本车与前车的车速一致。在跟车行为中,一旦前车与本车距离过近,小于AEB程序设定的安全距离时,会立即触发AEB子程序;在车辆行驶的全过程中,当前方安全距离范围内出现行人时也会立即触发AEB程序,从而紧急制动。至此,本文对AEB与ACC实现了联合控制,AEB与ACC不是独立的两套系统,而是在同一个车辆控制器中相互关联的系统。车辆的自动驾驶模式下,AEB系统能够随时中断ACC系统的运行,停止车辆,AEB运行结束后又立即切换为ACC进程。
本文采用单目视觉方案进行自动驾驶导航,该系统的硬件主要为工业摄像头、工控机、监视器、执行器等部件。摄像头负责行驶路径图像的采集来感知周围环境;工控机用于道路图像处理与发出控制指令;执行器为执行控制指令以完成预定动作的机构,如车辆的转向、制动与驱动机构[3]。监视器可以用来观测实时的跟踪效果,并且便于研究调试,设计的控制器框架图如图4所示。
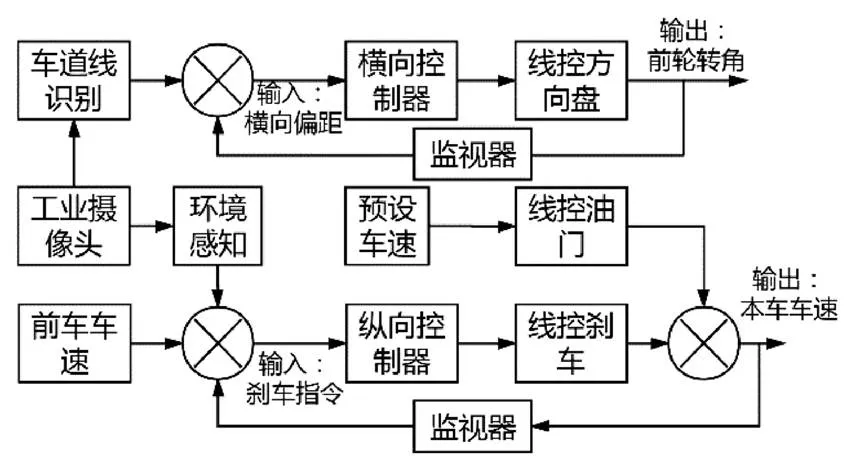
图4 控制器框架图
纵向控制器的设计,为AEB系统设置安全距离D,摄像头实时采集的本车与前车距离为1,本车与前方行人的距离2,一旦有障碍物进入安全距离范围,1<b或者2<b任意满足一项,即发送紧急刹车指令,此时线控刹车执行动作为将刹车踩到底。至此,纵向控制器完成本车遇行人的紧急制动或自适应跟车时的制动。
横向控制器采用PID控制算法,其原理是:

PID控制算法适合单输入单输出的问题求解,本文的横向控制器的输入即为前一级感知层的车道线识别的输出,该输出信号为横向误差与航向角误差的耦合量,横向误差是指车辆与道路中心线的横向距离的误差,航向角误差是指车身航向角的误差,由图4可知,控制器的输入均为反馈量,表示本采样时刻的控制指令值与实际测量值之差,横向控制器与纵向控制器都是闭环的反馈控制系统。
3 实车实验
3.1 实验过程
实验路段为江苏省扬州市津东路,该路段的弯道边缘非平滑圆弧,曲率变化大,为典型的非结构化道路,实验路线图如图5所示。本次实验的路线图从起点至终点包含两条直道与一条弯道,并且在起点前方50 m处有行人等待穿越道路,目的是模拟校园道路的不确定性场景,测试车辆的紧急制动性能。本文中所使用的自动驾驶试验平台以起亚KX5汽车为主体,如图6所示,配备有大恒工业相机、线控底盘系统、高性能工控机等硬件设备。线控底盘集成的下位机,通过CAN总线与上位机通信,可快速响应上位机的指令信号,对油门、刹车、转向盘等底盘的执行机构施加控制力。

图5 实验路线图

图6 起亚KX5自动驾驶试验平台
上位机即为自动驾驶实验平台中的高性能工控机,能够运行本次实验感知层、决策层与控制层的实车代码,视觉传感器为工业摄像头,摄像头实时采集的信号经过感知层的计算后得到车速、偏航角、横向偏差等数据作为决策层与控制层的输入。
3.2 实验结果
实车实验结果如下,拍摄了实车实验过程中实验车内驾驶员视角的照片,如图7、图8所示。

图7 ACC自动驾驶实车实验
实验结果表明,本文的横向控制器能够控制车辆完成车道保持功能,并在道路曲率变化时方向盘能够快速响应,及时完成转向动作;纵向控制器能保持车距进行自适应跟车,并且在遇到行人突然出现在汽车正前方时能够紧急制动,本文设计的决策逻辑简单有效,PID控制算法能够满足本次自动驾驶实车试验的要求,实现了基于校园道路场景的自动驾驶车辆ACC与AEB的联合控制。

图8 AEB自动驾驶实车实验
4 结论
本文提出了一种适用于校园道路的自动驾驶汽车的紧急制动和自适应巡航联合控制方法,采用基于工业摄像头的感知层视觉识别方案,运用线控底盘技术,进行了实车实验,完成自动驾驶车辆在直道内的紧急制动与自适应跟车,以及在弯道曲率变化的情况下能够通过PID控制算法进行车辆的横向控制,本实仅采用单目摄像头方案已经初步达到实验要求,本实验平台在未来还会采用双目摄像头与毫米波雷达的多传感器的方案,进行数据融合以及采鲁棒控制、模型预测控制等控制算法来提高控制算法的稳定性,以适应非结构化道路中自动驾驶车辆面临的各类复杂场景。
[1] J.Giacalone,L.Bourgeois,A. Ancora.Challenges in aggregation of heterogeneous sensors for Autonomous Driving Systems[C]//2019 IEEE Sensors Applications Symposium,2019:1-5.
[2] 余贵珍,周彬,王阳,等.自动驾驶系统设计及应用[M].北京:清华大学出版社,2019.
[3] 张超.视觉导航智能车辆的路径跟踪控制研究[D].哈尔滨:哈尔滨工业大学,2011.
[4]张会琪.基于多约束MPC的车辆避撞路径规划与跟踪控制[D].南京:南京航空航天大学,2019.
[5] 张扬.基于前视摄像头的自适应巡航控制跟随模式研究[D].南京:南京理工大学,2018.
[6] 龚建伟,姜岩,徐威.无人驾驶车辆模型预测控制[M].北京:北京理工大学出版社,2014.
[7] Razvan Solea, Urbano Nunes. Trajectory Planning and Sliding-Mode Control Based Trajectory-Tracking for Cybercars[J].Integrated Computer-Aided Engineering,2007(14):33-47.
Research of Emergency Braking and Adaptive Cruise Combined Control Based on Campus Uncertain Road Scene
GAO Yuan, WANG Changlong, TANG Xiaofeng, WENG Jiahao, GAO An, SONG Yanlin
( College of Mechanical Engineering,Yangzhou University, Jiangsu Yangzhou 225127 )
In order to achieve autonomous vehicle safety when driving in unstructured road, emergency braking and adaptive cruise combined control method which focuses on uncertain environment of campus road was studied. PID controller is designed in this paper, real vehicle experiment is carried out based on campus road and the results indicate that controller response quickly and can brake imminently according to situation of the load ahead, which ensure safety of automatic driving in uncertain road scene.
Autonomous driving vehicle; Emergency braking; Adaptive cruise control; PID
U495
B
1671-7988(2021)20-45-04
U495
B
1671-7988(2021)20-45-04
10.16638/j.cnki.1671-7988.2021.020.012
高源(1994.01—),男,硕士,扬州大学机械工程学院,研究方向为自动驾驶车辆运动控制。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
汽车实用技术(2022年19期)2022-10-19
舰船科学技术(2022年11期)2022-07-15
中国自行车(2022年3期)2022-06-30
汽车工程师(2021年12期)2022-01-18
内燃机与配件(2021年11期)2021-09-10
内燃机与配件(2020年20期)2020-09-10
网络空间安全(2019年8期)2019-03-18
汽车与运动(2017年11期)2018-05-22
科技传播(2012年10期)2012-06-06