
封装电路板的三维在线检测技术研究
2021-11-11 08:32何福权
电子元器件与信息技术 2021年7期
何福权
(深圳和美精艺半导体科技股份有限公司,广东 深圳 518000)
0 引言
随着封装技术SMT的逐步普及,电路板中的元器件会出现细小化与密集化情况,对于元件贴装所出现的缺陷问题进行检测,有效提高封装电路板整体质量。在传统的检测方法中,常见有红外线检测、电气检测和人工目检等,这些方法都各有利弊,同时也会受自身检测原理所带来的影响,使其检测能力无法适应高精度、高速度等要求。为了弥补这一缺陷,科学家研究出了线结构光视觉测量方法,该方法具备低成本、高精度、极强的实时性等诸多优点,由此本文对线结构光扫描封装电路板的缺陷进行研究,对自动光学检测系统进行分析,希望能够为日后工作提供参考。
1 SMT封装电路板三维在线监测系统设计情况
下图1为SMT封装电路板完整的三维检测结构框架,该框架是由光学子系统、计算机、图像采集子系统、扫描运动子系统等诸多结构组合而成,光学子系统主要构成为线激光器,图像采集子系统由两个部分组成,即CMOS与图像采集卡的融合,扫描运动子系统的构成部分包括控制箱与较高精准性的电控精密平移台。在进行操作的时候,利用线激光器进行垂直透射,确保在特定的角落里CMOS相机能够对称地分布于光平面两侧,从而一个线结构传感器形成,进行测量时,扫描工序的完成需要光平面垂直方向与平移台配合。

图1 检测系统结构图
2 双传感器统一标定方法
为了保证在测量时,两个传感器状态达到实时互补,必须确保两个传感器坐标的统一性。文章的宗旨就是探索统一标定双传感器的措施,借助平行线靶标的应用,进行不同靶标图像位置的有效采集,该过程不仅实现左面传感器与右面传感器所输送的参数Cij与Dij,同时也能保证坐标系处于统一的状态。
2.1 标定情况
根据下图2可知,在系统标定时,需要左面相机与右面相机根据某个角度,进行设置工作的对称性,其间距平行线构成状态是通过靶标中一组去确定,随后与Xw轴处于重合状态,将这个重合位置确定为中心线,其中靶标坐标系以Ow设定为原点,中心线与比邻两侧间的标记线,具备距离的相等性,其基准就是这两条线,同时确保相同距离的平行直线。

图2 坐标标定示意图
保证光条在投射过程中能够与靶标平面处于垂直状态,需要将测量坐标系之间建立在光平面中,保证左线结构光传感器与右线结构光传感器均在一个坐标系中。进行标定时,在标定时,必须遵照特定的方向将靶标当中的测量坐标实施平移,将Zw确定为平移的距离。可以将光平面与靶标平行线间的焦点作为标定的特征点,同时将Yw确定为平行线的间距离。通过该方法,可以保证左相机与右相机均能得到想要的特征点。
2.2 传感器标定结果
本文对标定方法的探寻和分析,宗旨就是系统与实际应用的有机结合,确保标定工作的完成。按照电路板表层变化的深度状态,将本次设计目标设定为5毫米,程序Z方位中测量区域务必高于等于5毫米。确保光平面与靶标的状态为相互垂直,然后应用非常符合的第一摆放位置,每次的平移运动间隔为1毫米,分别在0毫米,1毫米、2毫米、3毫米、4毫米和5毫米等多个位置,确定好靶标特征点。
3 自适应光条中心提算方法
光条中心的准确获取,能够确保三维检测结果具备准确性。SMT封装电路板中,因元器件布置密集、细小的个头,而且具备各异的封装类型、差异性的表面涂层,系统采集的图像不能杜绝遭受元器件表散射或者反射形成的噪声,也有可能受到电路板中密集元器件形貌的影响,出现变形情况,光条走向已经不是垂直或者水平的,其中很多光条会出现弯曲状态。提取光条中心的传统手段,利用极值法、梯度阙值法、灰度阙值法等不同措施,这些方法在使用过程中虽然十分简单,但是却会产生极大的噪声,因此很难保证后期得到数据信息具备很高的精准度。利用Steger算法提取光条中心过程中,可以从中得到很高的精密度,但是却需要进行多次的卷积工作,有着极大的运算难度,无法满足在线需求。在对其中优缺点了解后,本文会综合系统光条图像具备的特征,促进光条中心提取算法的自适应性,分析综合利用处理图像的手段,首先要进行去噪操作,然后根据产生变形的光条走向,完成光条中心的准确提取[1]。
3.1 小波变化光条图像去噪
其噪声在系统光条图像中发生,关键源于不相同的元器件表层不同部分的反射率,主要是因为元器件的表面各部分反射率有所不同,小波变化的时域局部性和频域很好,可以有效处理图像中某些微小的部分。噪声在光调图像中一般会在高频段中聚集,并在某些时域区域内存在,差异性的分布情况会在噪声小波系统出现,经过尺度变化之后,噪声会逐步变小,所以有必要利用小波变化手段,促进图像的分解速度,然后选择最佳的阈值确定,逐渐地在小波变化域中将某些幅值相对小的噪声分量去除掉,通过逆变换手段对图像进行重组,然后获取噪声去除之后的图像。通过观察可知,利用有效的方法可以消除其中大量的干扰因素,同时对光条中关键信息完整保留。确保改善相应的图像质量,然后图像的分割工作也完成,对其细化案处理后,可以得到光条中心线[2]。
3.2 Gabor滤波其探测光条走向
在使用Gabor滤波器的时候,对方向的选择项良好,在表示频率与方向中,更类似于人类的视觉系统,由此在图像处理范围里逐渐应用该方式。存在极佳方向选择性,在方向与频率的表示中,与人类视觉系统有着相似性,所以该方法被逐步应用到图像处理领域中。将多尺度Gabor滤波加入系统变形图像中,能够对中心线中各点的大致方向实施完整探测,然后结合灰度重心法,有效修正光条中心点,最终能够获取更加精准的光条中心。可以利用二维偶对称Gabor滤波器,在图像中有效增强偶特征,例如中心轴线,在有效突出主轴垂直方位的程序中,比如中心轴线,在对主轴垂直方向特征进行突出过程中,延主轴方向特征能够被Gabor滤波器所控制,由此采用更多尺度的Gabor滤波手段,能够准确地检测出光条中心的法线方位。实施细化光条后,能够基本获取中心线中各点Pi,综合以往的实践经验,Gabor滤波的完成可以考虑应用几个最符合的值,然后通过对比获得该点能量更广阔的方向,其状态必须垂直于,而且对较佳的临域内,对灰度重心法应用,对该点的坐标实施修正,最终将光条中心精准获得。
4 精准度验证与实验
在进行扫描测量时为了验证其系统准确度,必须对该系统进行应用,测量实验的目的是完成标准块的验证。把标准块视为实验目标,确保将两个标准块研磨一体化,同时完整地标记两个标准块的表面,分别是平面一与平面二,比如在图3中,标准块厚度为3毫米,利用系统对于两个平面完成测量与扫描工作,最终获得想要的数值[3]。
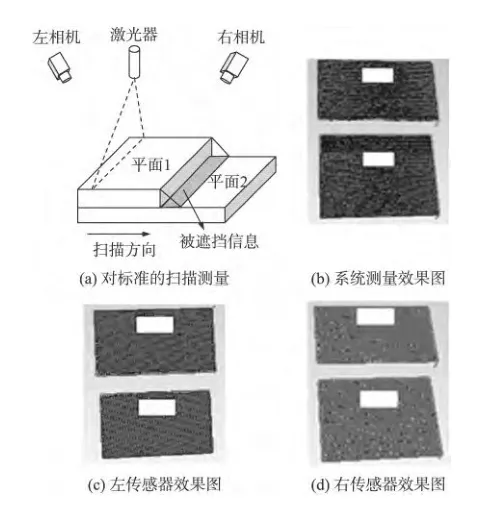
图3 精准度验证与实验图
利用该方法,可以对1毫米、2毫米、3毫米、4毫米、5毫米的标准块完成测量工作,随后得到的结果如下表1,通过比较方法可知,系统测量必须保证0.02毫米以上的精准度[4]。

表1 标准块测量结果(单位:毫米)
5 结语
综上所述,本文主要是在线结构光传感器基础上,搭建与设计了三维在线监测系统,测量了与其相关的各项柱距,将其用在SMT封装电路板的工艺流程中,有效的检测其中可能出现的缺陷问题。将双传感器测量方法应用到该系统,解决了数据丢失的问题,进行标定时,会使用到平行线靶标,也就是可以在同一的时间内,保证两个传感器的标定结构状态的一体性。把图像处理手段应用在系统中,首先去噪处理在图像中完成,然后对光条最大能量方位进行探索,确定光条中心。实验结果显示,该方式可以达到0.02毫米的测量精度,最大限度地符合封装电路板的缺陷。
猜你喜欢
军民两用技术与产品(2021年10期)2021-03-16
汽车维修与保养(2020年11期)2020-06-09
世界农药(2019年3期)2019-09-10
资源再生(2017年4期)2017-06-15
中国惯性技术学报(2017年1期)2017-06-09
电子制作(2017年23期)2017-02-02
光学精密工程(2016年4期)2016-11-07
光学精密工程(2016年3期)2016-11-07
中国资源综合利用(2016年10期)2016-01-22
肿瘤影像学(2015年3期)2015-12-09
