
基于光电传感的目标寻的智能车设计
2021-11-10 05:27:02刘鹏孙德藩王涛贾玉磊
电子设计工程 2021年21期
刘鹏,孙德藩,王涛,贾玉磊
(中国石油大学(华东)理学院,山东青岛266580)
随着经济的发展、科技的进步,人们对生活品质的要求不断提高,生产生活的智能化、便捷化成为今后重要的发展方向[1-2]。智能车以其应用范围广、承载功能多、整体结构成熟等优点,成为当前运输、导航、制造业等领域的研究热点[3-7]。在智能车设计过程中,利用传感器实现环境感知是整体设计的关键问题。光电传感器以其响应速度快、灵敏度高、技术成熟、价格低廉等诸多优势,成为首选器件。该系统利用MK60FX512VLQ15 微控制器作为核心控制单元,基于光电传感器进行整体设计,对目标物(信标灯)进行自主搜寻、自主路径规划,最终实现目标寻的自主驾驶功能。
1 系统整体设计
智能车整体机械结构采用四轮结构,后轮利用直流电机进行驱动,前轮采用转向舵机进行拉动机械转向,从而实现智能车的控制。选取的智能车车模车架长28.5 cm,宽17.8 cm,高6.0 cm。在保证车体稳定性的同时最大限度减轻车架重量,选取具有较强弹性与刚性的黑色玻纤维板作为底盘主体材料。前轮采用滚珠轴承结构,后轮采用双滚珠差速设计配合直流电机驱动。系统采用的车体规格相关数据如表1所示。
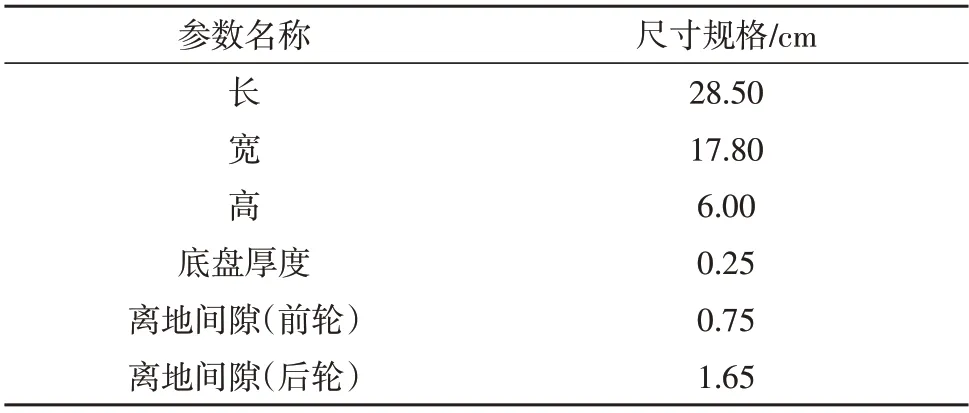
表1 智能车车体具体参数
系统由图像传感采集处理模块、电源管理模块、主控板电路模块、LCD 显示模块和智能车驱动模块组成,系统框图和搭建的实物图分别如图1、图2所示。电源管理模块为微控制器、LCD 显示屏、红外传感器、舵机等提供稳定可靠的电源;图像传感采集处理模块包含1 个OV7725 鹰眼摄像头、2 个红外传感器和1 个ATK-VL53LOX 激光测距传感器,实现目标物和周围环境的精准采集;MK60FX512VLQ15 微控制器根据图像传感采集模块采集到的信息,控制智能车驱动模块,通过转向舵机和电机驱动控制智能车的行驶角度和速度,同时将摄像头采集的光斑大小和智能车的转速实时显示在LCD 显示屏上。
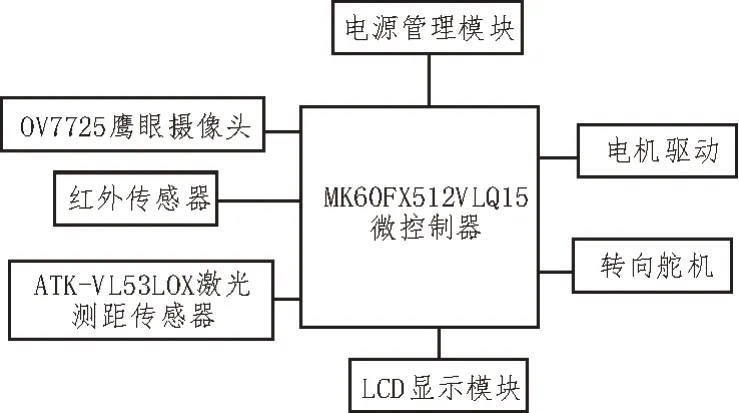
图1 系统框图
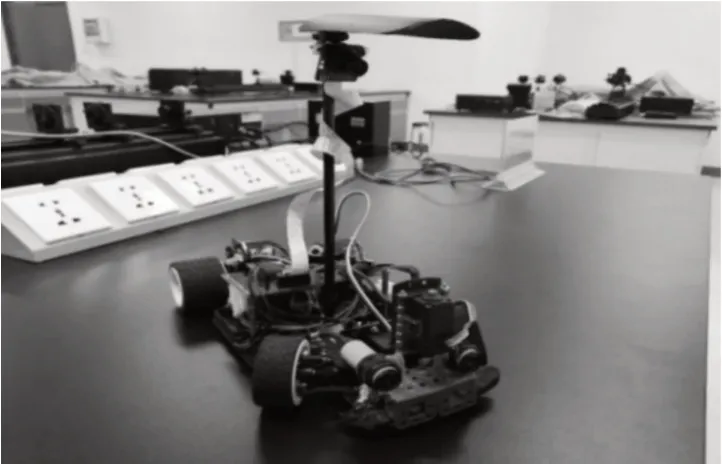
图2 系统实物图
2 系统硬件设计
为实现智能寻的功能,拟采用红色信标灯作为目标物进行识别检测。选定CCD/CMOS 传感器作为目标采集主要传感器,其他传感器为辅,选定MK60为控制器,传感信号经K60 MCU 的I/O 口接收处理后,用于智能车的行为控制。同时将光电编码器放置于后轮机械齿轮结构处,对电机转速进行实时采集,采集的信息经主控板芯片处理,控制智能车的速度以及转向角度,实现智能车稳定运行。智能车硬件设计方案如图3所示。
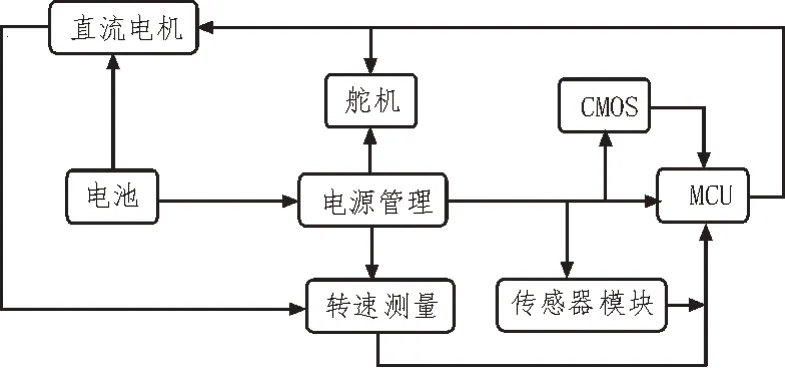
图3 智能车硬件设计方案
2.1 电源管理模块
在智能车系统硬件电路中,电源是其正常工作的关键。该设计选择的MK60FX512VLQ15 最小系统板、LCD 显示屏、红外传感器等需要稳定的3.3 V供电[8],编码器等需要5 V 供电,转向舵机采用6 V 电压,而系统车体所搭配的电源为7.2 V 镍铬电池。查找相关器件的DATASHEET 进行筛选,最终选定使用TPS7350、B0512LS、LM1084、AMS1117四款芯片实现电源稳定输出。该模块电路原理图如图4所示。
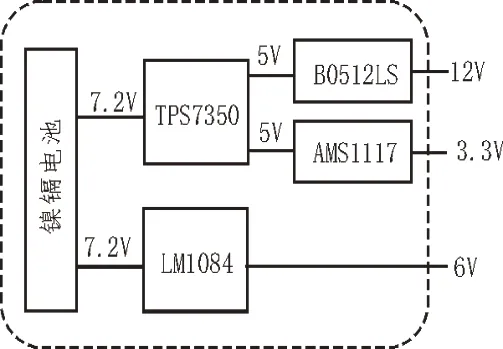
图4 电源管理模块电路原理图
2.2 电机驱动模块
选择常用的H-Bridge 驱动电路作为电机动力驱动电路,采用IR2104S 作为电机驱动芯片,IR2104S是一款高性能的半桥驱动芯片[9-10],通过利用两片IR2104S 芯片输出的直流信号控制MOS 管的通断,进而改变通过直流电机的电流方向,达到控制电机正向、反向转动的目的。电机驱动电路原理图如图5所示。
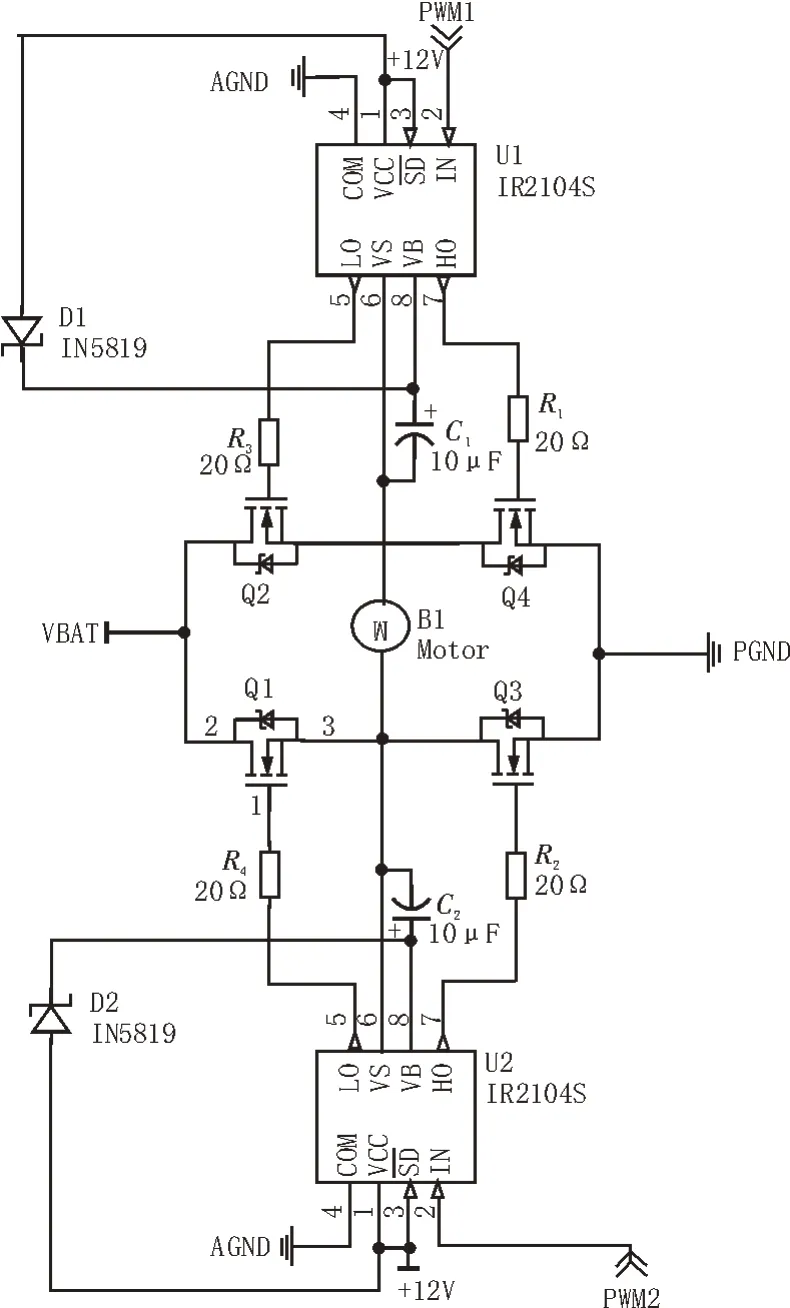
图5 电机驱动模块电路原理图
2.3 图像采集模块
图像采集模块采用OV7725 作为主要图像传感采集装置,检测信标灯(目标物)的信息,2 个红外传感器用于紧急避障,优先级最高,解决摄像头的盲区问题,同时ATK-VL53LOX 激光测距传感器作为鹰眼摄像头的辅助,实现目标物方位的精准获取。OV7725 鹰眼摄像头是一款低压CMOS 器件,传感器整体封装尺寸相较其他摄像头来说较为小巧,但在小尺寸内提供了单芯片VGA 相机和图像处理器的全部功能。此外,此型号传感器具有较小图像畸变以及强大的内置图像处理算法,可以有效满足文中智能车系统对于图像采集的要求[11-13]。
2.4 最小系统板
控制单元采用恩智浦公司(飞思卡尔公司被其收购)Kinetis 系列芯片中的K60 芯片作为主控芯片。Kinetis 系列芯片是飞思卡尔公司(现已被NXP公司收购)推出的业界第一款基于ARM Cortex-M4内核的混合信号微控制器。MK60FX512VLQ15 具有多个I/O 端口,可以实现定时、通信、模拟等不同功能[14-16]。利用主控单元能处理鹰眼摄像头、红外传感器、激光测距传感器、光电编码器等采集的信息,实现智能车目标寻的功能。
3 系统软件设计
系统软件设计是智能车整体设计的关键部分,逻辑清晰简洁明了的软件设计可有效增加系统整体的稳定性,提高智能车系统的运行效率。该系统的主要功能为智能车自主寻的,即对信标灯进行自主搜寻、自主轮径规划最终实现信标灯的查找功能。系统软件整体设计流程框图如图6所示。
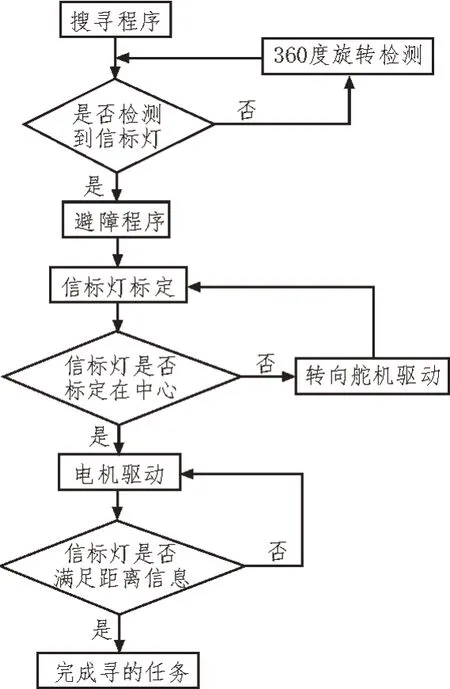
图6 系统软件整体设计流程框图
3.1 目标寻的程序设计
系统主要通过摄像头传感器进行目标识别,使用特定滤波片,有效排除杂光干扰。通过逐行扫描所得到的强度信息,确定信标灯中心位置,以此作为标定进而控制转向系统进行目标搜寻[17]。与此同时,对智能车寻找到信标灯时所探测到的最大直径作为基准标定,将探测值与其进行比较从而控制电机驱动模块驱动智能车前进或后退。其流程框图如图7所示。
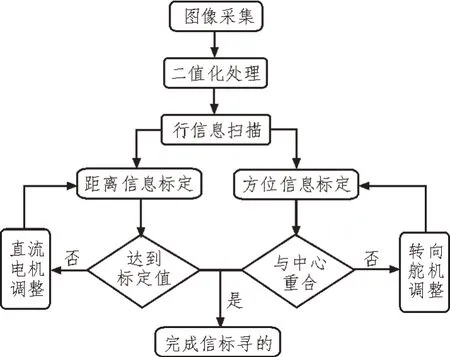
图7 摄像头信标定位流程框图
3.2 智能车速度、转向角度控制程序设计
智能车系统的动力主要来源于直流电机,由于所选芯片对电机转速并非完全控制,在驱动过程中会出现数据量偏移情况,从而导致实际控制与预期控制之间存在很大差距。
此外,车体重量、电池电量等均可能会对车速造成影响,因此设计采用光电编码器对后轮进行转速实时反馈,根据反馈的信息,通过PID 算法控制主控板输出PWM 波的周期,实现对电机转速调整,从而控制智能车车速。智能车转速、转向角度控制流程框图如图8所示。
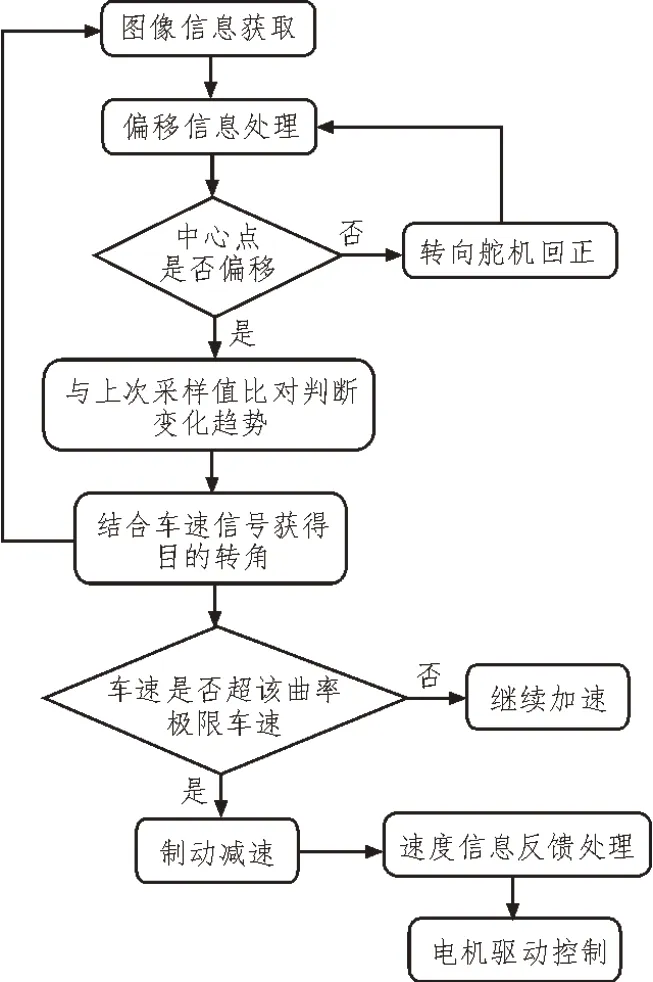
图8 智能车转速、转向角度控制流程框图
4 结 论
文中从硬件、软件两个方面介绍了基于光电传感的目标寻的智能车系统,通过对元器件进行横向、纵向对比,选取最佳性价比的元器件[18];分模块进行电路设计,增加电源管理模块保障电路的正常工作;采用四轮后轮驱动、前轮舵机转向,最大限度模拟真实行车环境,该系统具有成本低、调试方便、实用性强的特点,为智能小车设计提供了新思路与新方法。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
汽车工程师(2021年12期)2022-01-18 06:02:43
汽车维修技师(2019年7期)2020-01-16 04:33:04
汽车维修技师(2018年11期)2018-05-11 02:38:32
铁道通信信号(2018年3期)2018-04-19 02:32:56
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
汽车维修与保养(2015年8期)2015-04-17 03:32:59
水道港口(2015年1期)2015-02-06 01:25:45
新高考·高一物理(2014年4期)2014-09-17 06:52:02
