
基于改进AlexNet模型的串联型电弧故障识别方法
2021-11-10 01:58谢振华班云升
济南大学学报(自然科学版) 2021年6期
朱 晨,王 尧,谢振华,班云升,傅 炳,田 明
(1. 河北工业大学 省部共建电工装备可靠性与智能化国家重点实验室,天津 300130;2. 浙江省机电产品质量检测所有限公司,浙江 杭州 310051; 3. 国网冀北电力有限公司 廊坊供电公司,河北 廊坊 065000)
随着全社会用电量的不断攀升,电气线路及用电设备故障造成的电气火灾事故逐年增加[1]。据统计,低压配电系统的电气火灾约占火灾事故总数的30%,位居各类火灾原因之首[1-2],其中超过40%的电气火灾由电弧故障引起,电弧故障已成为低压配电系统电气火灾事故的主要诱因。根据故障电流形成原因及流通路径,电弧故障可以分为串联型、并联型以及接地型3种,其中接地电弧故障可归为并联型电弧故障[3-5]。
并联型电弧故障近似短路状态,电弧电流相对较大,其特征明显且不易受负载特性影响。串联型电弧故障不仅受故障支路负载影响,而且还受到与之并联的正常支路负载影响,因此,串联型电弧故障比并联型电弧故障更难识别,是国内外学者关注的热点[1-5]。
当发生电弧故障时,电弧支路的电流波形发生畸变,并伴有高频分量,同时负载端电压波形也发生变化,这是传统检测方法的主要依据。Tisserand等[6]利用线电流的代数导数作为电弧故障检测的特征量。Artale等[7]利用电弧故障电流线性调频Z变换(chirp Z-transform, CZT)后的低频谐波进行电弧故障识别。刘晓明等[8]分析了不同负载条件下电弧电流处于零休期间电流高频分量的变化规律,并将其作为判据进行电弧故障诊断。王尧等[9]利用电弧电流变化率与其有效值的比值以及频率为6~12 kHz的高频电流信号进行电弧故障识别,提出一种实用化交流电弧故障快速检测算法。传统方法能够借助快速傅里叶变换(fast Fourier transform,FFT)、离散小波变换(discrete wavelet transform,DWT)等成熟算法进行快速计算,便于微处理器硬件实现,但是,基于电弧电流时频域特征的传统检测方法无法摆脱人为设置的电弧故障识别阈值的束缚,随着低压配电系统非线性负载占比越来越高,在某些工况下电路正常工作电流可能与电弧故障电流时频域特征相近,容易引起误判或漏判。
人工智能的发展为电弧故障诊断技术研究打开了新的思路,依靠网络模型训练能够自动建立电弧故障识别的边界条件。马少华等[10]分析了常用家电和办公电器正常工作、碳化路径电弧以及点接触电弧等不同工况下的电流特征,并进行了相空间重构,结合电弧电流相空间平面图的信息维数和零休时间建立支持向量机的识别模型。Yang等[11]采用电弧电流半波信号对应的灰度图像作为模型输入,提出了一种基于时域可视化卷积神经网络的电弧故障识别方法。苏晶晶等[12]提出了一种基于经验模态分解(empirical mode decomposition,EMD)和概率神经网络(probabilistic neural network,PNN)的电弧故障多变量判据诊断方法,利用EMD提取电弧故障电流时域特征,并用PNN进行电弧故障诊断。郭凤仪等[13]采用小波变换提取电弧故障电流高频特征量,并用支持向量机进行故障诊断。Liu等[14]采用DWT提取电流的时频域特征,并采用径向基函数的神经网络进行电弧故障识别。Siegel等[15]提出了一种具有3层隐藏层的全连接型神经网络,利用电弧电流预处理结果作为神经网络输入量,所采用的数据预处理方法包括离散傅里叶变换、DWT以及梅尔频率倒谱变换。Wang等[16]提出了一种基于时间和频率混合分析和全连接神经网络(hybrid time and frequency analysis and fully-connected neural network,HTFNN)的电弧检测算法。这些方法无须人为设定故障检测阈值,并具有较高的电弧故障检测精度,故障识别准确率一般在95%以上,但是大多需要采用FFT、DWT等时频域分析方法预先提取故障特征,在一定程度上仍然受到人为因素的影响。
针对现有人工智能电弧故障检测方法的不足,本文中直接采用原始电流波形作为模型输入,提出一种基于改进AlexNet模型的串联型电弧故障识别方法。首先,搭建电弧故障试验平台,采集并分析典型线性、非线性负载及其组合条件下电弧故障试验数据,建立故障电弧数据库;其次,为了保证电弧故障识别准确率,对AlexNet模型进行改进,并对网络训练策略进行优化;最后,分别采用已知负载与未知负载电流信号对所提方法进行试验验证。
1 串联型电弧故障数据库建立
1.1 串联型电弧故障试验平台与试验方案
根据国家标准GB/T 31143—2014《电弧故障保护电器(AFDD)的一般要求》设计了串联型电弧故障试验平台,如图1所示。

MCU—微控制单元; RS232—串口;S1、S2—开关。图1 串联型电弧故障试验平台
该试验平台由220 V/50 Hz交流电源、点接触式电弧发生装置、试验负载以及试验电流采集装置等组成。试验平台的试验线路包括正常负载与电弧负载2条支路,该试验线路既可以进行单一负载(负载2)电弧试验,也可以开展正常负载(负载1)与电弧负载(负载2)的并联试验。
图中试验电流数据采集是通过设计的电弧数据采集(data acquisition,DAQ)板采集电流互感器(current transformer,CT)输出信号实现,其中DAQ板使用STM32H743单片机,采样率为100 kHz,分辨率为16位。CT输出信号首先进入有源低通滤波器,信号带宽被限制在50 Hz~20 kHz,然后被单片机模拟数字转换器(analog-to-digital converter, ADC)采集,通过程序将信号数据整合后存储于安全数码(secure digital,SD)卡或通过内置的RS-232串口实时传输到个人计算机(personal computer,PC)上。DAQ板相较示波器而言,采集的电弧数据更趋近于实际微控制单元(microcontroller unit, MCU)运行数据,有利于提高算法对电弧的识别准确率。
由于交流电弧故障保护的应用场合主要是家庭或办公场所[17],因此试验负载不限于国家标准GB/T 31143—2014中涵盖的非线性负载,还包括常见家用电器如电磁炉、微波炉等。为了模拟更多的实际工况,本文中采集了组合负载电流数据。串联型电弧故障试验负载参数及分类如表1所示。

表1 串联型电弧故障试验负载参数及分类
通过电弧试验平台分别采集每种负载20组正常和电弧故障状态试验数据,共400组单一负载电流数据。同时,每种负载组合类型采集10组正常和电弧故障状态试验数据,用于测试网络对未知负载情况下的电弧识别准确率。
1.2 串联型电弧故障波形数据库
神经网络的训练学习需要大量的样本数据,同时为了提高网络模型的泛化能力,需要保证样本数据的一致性,因此,需要对采集的数据进行预处理来建立数据集,处理过程包括以下3个步骤。
1)数据“清洗”。试验数据是由多个试验室在不同时间点采集,可能会导致电弧试验数据出现异常点。为了消除同类数据的不一致性,提高数据质量,在训练前通过人为干预对试验数据进行“清洗”,即对试验数据进行人工筛选,删除数据中的异常数据点。需要“清洗”的数据类型主要包括试验设备引起的电弧数据周期数偏少、由采集设备原因造成采集数据的空缺值等。
2)数据分割。深度学习算法训练和识别过程对数据格式有一定要求,最基本的要求是每条输入数据的格式和大小必须保持一致,为此,需要对原始采样数据进行分割,以工频周期为基本单位将其处理成等长数据段。
考虑到电弧故障保护国家标准的要求,采用了有重叠的滑动窗口进行数据切割,数据窗口长度为4个工频周期(4×0.02 s),数据窗口3个工频周期(0.06 s)滑动,即数据重叠率为25%,如图2所示。这种数据切割方法可以满足算法实时性要求,即串联型电弧故障最小检测时间为0.12 s,同时足够多的数据也保证了算法训练与识别稳定性和准确度。
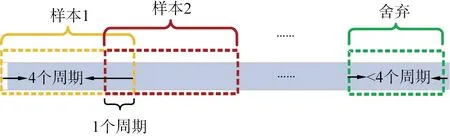
图2 数据分割过程
首先利用MATLAB软件读取电流数据,然后从数据开始位置截取4个周期的数据作为一个样本,之后向后滑动1个周期,再次截取4个周期的数据作为下一个样本。直到滑动到达文件末尾,并舍弃末尾处不足4个周期的数据。
3)数据标注。经过数据“清洗”、数据分割过程后,单一负载电弧故障数据和正常状态数据各有5 000组。此时,数据均以后缀为.csv的文件存放于文件夹中。所有的正常状态数据存放在标注为“正常”的文件夹中,电弧故障状态数据存放在标注为“故障”的文件夹中。
对电弧数据进行标注主要是为了神经网络能够进行下一步训练。利用MATLAB软件将数据整理为数据集,数据集中的每一行数据对应一个数据样本,并在制作过程中同时进行数据标注,以数据文件所在文件夹为标注依据,生成一个数组(有弧数据标注为1,无弧数据标注为0)。在神经网络进行训练时,同时读取数据集及其标签数据。以电阻负载、电磁炉负载为例,数据样本标注如图3所示。

图3 电阻负载及电磁炉负载标签样本
经过数据预处理过程,电弧故障电流数据集保留了原始电流信号的特征,减少了人为提取特征量过程中对经验的依赖性。同时,经过数据“清洗”过程,减少了噪声对电弧电流的干扰,有利于提高识别模型的识别准确率。
2 改进的AlexNet模型
2.1 经典网络模型结构对比
近年来,随着人工智能技术的不断发展,在分类问题上人工智能的识别精度越来越高,识别准确率已经达到98%[18]。电弧故障的分类属于简单的二分类问题,因此可以采用人工智能的方法对此问题进行研究。本文中研究对比了不同网络结构的优缺点,如表2所示。
OverFeat模型与AlexNet模型结构相似,但增加了卷积核的个数,计算成本增加1.9倍。VGG-16模型共有16层,包括13个卷积层和3个全连接层。VGG-19模型与VGG-16模型相比,识别错误率降低0.1%,但计算成本增加1.27倍。GoogleNet模型共有22层,包括3个卷积层、9个叠加的Inception模块和1个全连接层。GoogleNet后续出现了更多的改良网络模型,如Inception-v3、Inception-v4等。Inception-v3模型共有42层,识别错误率比GoogleNet模型的低3%,但计算量增加2.5倍。Inception-v4模型的结构更为复杂,识别错误率降低0.4%。ResNet模型的一系列网络都包括残差模块,因此又称为残差网络。ResNet-50模型的网络层次较多,累加次数达到了109数量级,而ResNet模型共有152层,与ResNet-50模型相比,识别错误率降低1%,但是权重参数个数增加2.5倍,累加次数增加2.9倍。

表2 主流卷积神经网络模型计算参数
通过对主流卷积神经网络(convolutional neural networks, CNN)模型计算参数分析可知,虽然庞大而复杂的多层CNN结构具有较强的学习能力和图像识别能力;但是网络层次较多,参数个数显著增加,训练时所需要的样本量巨大,不仅浪费计算成本,还会因层数过多而过度地学习特征,强化噪声特征,出现过拟合现象,对故障识别结果准确性产生影响,因此,多层次CNN(如GoogleNet、VGG、ResNet等)网络模型的优势在电弧故障诊断领域反而成为了劣势。相较其他的多层次网络,AlexNet模型较适合用于电弧故障诊断。典型CNN模型的优缺点对比如表3所示。
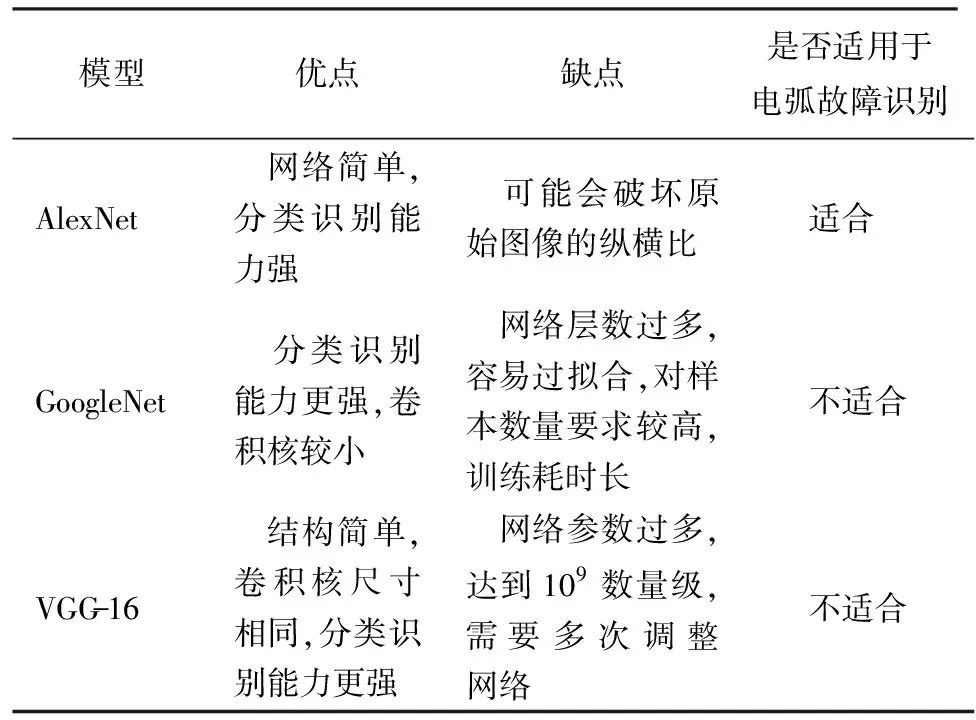
表3 典型卷积神经网络模型优缺点对比
2.2 AlexNet模型优化
AlexNet模型包括5个卷积层及3个全连接层,网络输入为二维数组,输出是分类的结果。AlexNet模型结构如图4所示。

图4 AlexNet模型结构
AlexNet模型的第1个卷积层包含96个尺寸(行数×列数)为11×11的卷积核,第2个卷积层包含256个尺寸(行数×列数)为5×5的卷积核,第3、4个卷积层分别包括384个尺寸(行数×列数)为3×3的内核,第5个卷积层具有256个尺寸为3×3的内核,网络的识别结果通过最后一个全连接层输出。
虽然经典AlexNet模型的网络结构简单,但具有2个较大的卷积核,模型参数数量大。相关研究表明,采用多个小尺寸卷积核堆叠代替大卷积核进行特征提取,在不影响数据特征表达基础上能够减少网络参数,加快网络收敛速度,从而缩短训练时间,在连通性不变的情况下,效果显著[19-21]。同时,GoogleNet模型中所使用的Inception模块结构,也可以通过小卷积核叠加替代大卷积核来提高分类精度,因此,为了减少模型参数,增强模型的非线性表达能力,提升识别精确度,本文中借鉴Inception系列模型思想,使用小卷积核代替大卷积核,对经典AlexNet模型架构进行优化。
经典AlexNet模型有2个大卷积核,其中1个是尺寸为11×11的卷积核,用来提取图像底层纹理等通用特征,与电弧故障电流特征关联度不大,因此保留其参数与结构。从卷积原理分析,使用尺寸为3×3的卷积核连续卷积2次可以达到1个尺寸为5×5的卷积核卷积1次提取特征的能力,即这2种卷积过程得到的结果都反映了原始图像中相同像素时的特征。卷积核替代过程如图5所示。
在卷积核移动步长为1的前提下,以n(n∈)表示堆叠的卷积核数目,卷积核堆叠后待训练参数个数为3×3×n,对应的单个卷积核参数可表示为(2n+1)2,则卷积核替代前后训练权值比r可表示为
(1)

图5 小尺寸卷积核代替大尺寸卷积核示意图
由式(1)可知,1个尺寸为5×5的卷积核具有25个待训练权值,而使用2个步长为1的尺寸为3×3的卷积核,权值个数降到18,节省了28%的计算成本。由于连续2次卷积过程均需要线性整流函数(rectified linear unit,ReLU)的激活,得到了比卷积核替代前更多的非线性特征表达,有利于更全面、精准地提取电弧电流特征,提高电弧故障识别准确率,因此将AlexNet模型中第2个卷积层中尺寸为5×5的卷积核用2个尺寸为3×3的卷积核替代。
通过上述分析,基于改进AlexNet模型的串联型电弧故障检测模型由6个卷积层、3个池化层和3个全连接层组成,电弧故障模型的输入为电弧故障数据集,输出为线路状态,即“正常”或“故障”。基于改进AleNet模型的串联型电弧故障识别模型结构如图6所示。
3 基于改进AlexNet模型的串联型电弧故障识别方法
3.1 改进AlexNet模型的参数配置
对改进AlexNet模型进行参数配置。激活函数选用ReLU函数,使用dropout正则化,dropout率设置为0.5。权值更新优化算法为随机梯度下降(stochastic gradient descent,SGD)算法,初始学习率为0.01,若验证集的准确率随着迭代次数的增加不再变化,学习率降为之前数值的1/10,则损失函数为交叉熵损失函数。

图6 基于改进AleNet模型的串联型电弧故障识别模型结构
根据上述参数,对网络进行训练时,需要考虑批次尺寸(batch size)、学习率以及数据集的分割比例等参数的影响。批次尺寸是每一次梯度寻优使用的随机样本量大小,关系到网络的训练时间和识别准确率,本文中拟选取20、40、60、80、100、120、140组7种批次尺寸的数据进行训练时间和识别准确率的分析。学习率的大小决定网络参数的更新幅度,网络训练初始阶段,较大的学习率有助于网络快速收敛。随着迭代次数的增加,网络趋近于最优点,可通过适当减小学习率来降低参数更新幅度,使网络收敛于最优点。数据集的分割比例也会影响网络的识别精度和泛化能力。对于批次尺寸、学习率和数据集的分割比例都需通过试验来获取最优值。
3.2 基于改进AlexNet模型的串联型电弧故障识别流程
基于改进AlexNet模型的串联型电弧故障识别流程如图7所示。

图7 基于改进AlexNet模型的串联型电弧故障识别流程
电弧故障识别流程具体步骤如下:1)将采集到的电流信号进行数据预处理,得到电弧故障数据集。将数据按照一定比例分为3组,分别作为训练集、验证集和测试集。2)网络参数初始化,网络模型随机从训练集中提取一个样本,从前向后依次计算得到输出,通过反向传播误差,调整网络参数并更新网络模型。然后输入下一个样本,直至误差达到最小,则输出电弧故障识别模型。3)将测试集输入电弧故障识别网络模型得到识别准确率,即可以对模型识别结果进行评估。
4 试验验证
为了验证基于改进AlexNet模型的串联型电弧故障识别方法的性能,在计算机随机存储器内存为32 GB,配置了NVIDIA GeForce GTX 2070显卡的情况下,分别训练优化前、后的AlexNet模型并将电弧故障识别结果进行对比分析。
4.1 已知负载电弧故障识别结果分析
分别选取20、40、60、80、100、120、140组样本7种批次尺寸的数据,分析数据批次尺寸与训练时间及识别准确率的关系,结果如图8所示。由图可以看出,当批次尺寸增加时,电弧故障识别准确率呈现先上升后下降的趋势,训练时间呈现快速变短到缓慢变短的趋势。批次尺寸为100组样本时,识别准确率最高,训练时间约为1.7 h,与批次尺寸为120组样本时相比,虽然训练时间增加0.1 h左右,但准确率提高约3%。批次尺寸从120组样本增大到140组样本时,电弧故障识别准确率明显下降。由于在训练时间波动范围较小时,要保证模型识别准确率,因此综合时间成本和电弧故障识别准确率考虑,识别模型采用的批次尺寸为100组样本。

(a)训练时间
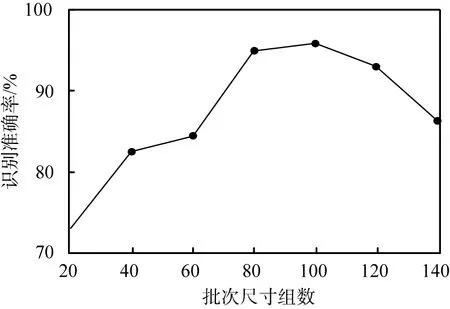
(b)识别准确率图8 数据批次尺寸与训练时间及识别准确率的关系
将样本个数为10 000的数据集按不同比例分为训练集、验证集与测试集,并对其进行验证,结果如图9所示。由图可以看出,不同数据集的电弧故障识别准确率不同。随着数据集中训练集所占比例的增加,测试集和验证集的识别准确率曲线均呈现上升趋势。以同一组数据集为研究对象,基于改进AlexNet模型的串联型电弧故障识别方法的准确率较改进前有所提升。其中,训练集数据个数与验证集数据个数之比为75∶15的数据集识别准确率最高。改进前的AlexNet稳定时的验证集识别准确率为92.08%,改进后的AlexNet稳定时验证集识别准确率为99.89%,收敛速度较改进前明显提升。改进AlexNet模型在不同数据集时电弧故障识别准确率如表4所示。
改进AlexNet模型在训练过程中学习率共有3次更新,如图10所示。由图可知,在迭代次数为47时学习率下降为0.001,在第71次迭代时学习率更新为0.000 1,此后到迭代次数为100时学习率保持不变。

(a)验证集

(b)测试集图9 AlexNet模型与改进AlexNet模型的 电弧故障识别准确率

表4 改进AlexNet模型在不同数据集时电弧故障识别准确率

图10 改进AlexNet模型的学习率更新曲线
4.2 未知负载电弧故障识别结果分析
在实际应用中,负载组合情况复杂,试验采集所有工况下的电流信号数据工作量巨大且不易实现,参与训练的数据集通常是有限的;但是,电弧故障识别模型应具有一定的泛化能力,能够准确识别未参与模型训练的电弧故障电流信号,因此应验证电弧故障识别模型对未知负载电弧故障的识别准确率。为了直观地观察统计模型对电弧故障的误识别、漏识别情况,采用组合负载试验数据作为未知负载测试集,对模型输出结果进行统计,将不同负载、不同状态电流数据编号,如表5所示。其中编号1、7分别属于同一负载条件下的正常状态和电弧故障状态数据,负载后标记“电弧”为电弧发生的支路,其他数据同表中编号形式以此类推。
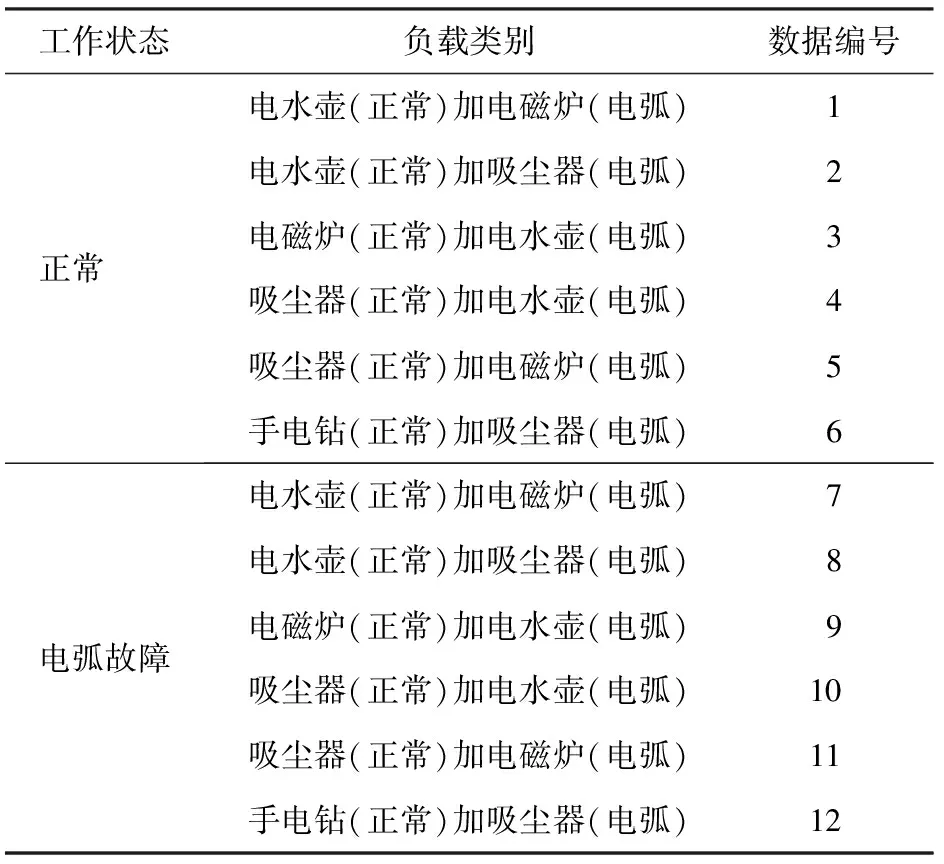
表5 未知负载测试集编号
基于改进AlexNet的串联型电弧故障识别方法对未知负载测试集的识别准确率如表6所示。由表中数据可以看出,该方法的识别准确率均在97.5%以上。虽然存在着一定的误识别和漏识别情况,但

表6 未知负载测试集识别准确率对比
从整体的识别结果来看,在不需要人为设置识别阈值的情况下,该方法能够从已知负载电流数据中提取具有类别区分性的特征,对未知负载电弧故障具有较高的识别准确率,能够实现非线性负载条件下电弧故障随机特性主动辨识。
5 结语
针对现有人工智能电弧故障检测方法依赖人为数据预处理的不足,直接采用原始电流波形作为模型输入,提出了一种基于改进AlexNet模型的串联型电弧故识别方法。搭建电弧故障试验平台,采集并分析典型线性、非线性负载及其组合条件下电弧故障试验数据,通过数据“清洗”、数据分割,采用二维数据图像形式建立了带有正常与故障标签的电弧波形数据库。借鉴Inception网络结构特点对AlexNet模型结构进行改进,采用尺寸为3×3的卷积核堆叠代替AlexNet模型中的尺寸为5×5的卷积核,在识别准确率基本不变的情况下减少了28%的网络参数。同时,采用SGD法优化权值更新过程,减少了网络训练时间,并利用学习率自适应调整训练策略加快了模型收敛速度。利用已知负载与未知负载电流信号对所提方法进行试验验证。结果表明,无论对于已知负载还是未知负载,该方法的识别准确率均在97.5%以上,并且不依赖于人为提取的电弧故障特征,解决了非线性负载条件下电弧故障特征量提取困难的问题,能够实现电弧故障准确识别。
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06
北京航空航天大学学报(2021年9期)2021-11-02
电子制作(2019年13期)2020-01-14
制造技术与机床(2019年9期)2019-09-10
电子制作(2019年11期)2019-07-04
新世纪智能(英语备考)(2018年11期)2018-12-29
北京航空航天大学学报(2018年1期)2018-04-20
电子制作(2017年22期)2017-02-02
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
