
双U型棉花精量播种机设计与试验*
2021-11-09 11:47卢宇蒋延金陈立东杜清华李国昉杜福根
中国农机化学报 2021年10期
卢宇,蒋延金,陈立东,杜清华,李国昉,杜福根
(1. 河北科技师范学院机电工程学院,河北秦皇岛,066000;2. 河北永发鸿田农机制造有限公司,河北唐山,063500)
0 引言
河北是我国的棉花种植大省,种植面积和总产量常年位居全国第二,其中主要集中种植在衡水、邯郸、沧州、邢台等地[1]。目前,河北省棉花机械化收获面积还不足种植面积的1%,机收率低,棉花种植生产全程机械化已经达到“瓶颈”时期,影响的主要因素是农机与农艺结合程度差,适合于机采棉的棉花播种机匮乏。
针对此现状,国内研究工作者研发了一系列的棉花播种机。如颜丙新[2]研发的2BMM-3免耕粉碎灭茬精量棉花播种机,该机装有秸秆粉碎装置和单体仿形机构,可以在麦茬地里直接播种,实现了麦茬地里播种深度一致的目标;张爱民等研究的2BMJ-3A型基于机采棉的智能精量播种机采用一膜三行的种植模式,作业工序多,减少了棉花的种植成本;安军鹏等[3]研究的多功能棉花覆膜播种机结构设计紧凑,机架可折叠方便运输,工作性能稳定,作业效率高。但符合农艺要求的全膜双U型棉花播种机还未见报道。
全膜垄沟播种可以达到节水、集水的目的,精量播种可以节省种子和提高种子的出苗率,达到增产的目的[4-5]。因此,本文研发了一种双U型棉花精量播种机,对勺轮鸭嘴式精量排种器和提土覆土装置进行设计与分析;应用ANSYS软件对排种器的成穴机构进行静力学分析,对提土覆土装置的传动轴进行模态分析;最后对精量播种机进行了田间试验。
1 总体结构及工作原理
双U型棉花精量播种机主要由机架、行走轮、提土覆土装置、药箱、种箱、肥箱、开沟器、勺轮鸭嘴式排种器、镇压轮、滴灌带架、滴灌带开沟器、土壤平整装置、变速箱等部件组成,如图1所示。
作业时开沟器开出肥沟,行走轮通过链传动带动槽轮式排肥器经排肥管进行侧深施肥,土壤平整装置除保证作业深度外还对土壤进行整平,机组利用滴灌带铺设装置进行铺滴灌带,设置在机架上的药箱通过药管经由喷头对土壤进行除草打药,拖拉机提供的动力经过变速箱传递给提土覆土装置,提土装置的挖土勺进行土壤的挖掘以形成双U型种床,覆土装置的绞龙进行土壤的传送并把土壤覆盖在种沟和地膜的边缘,勺轮鸭嘴式排种器在U型种床上进行精量播种,最后经过镇压轮镇压。该机的主要技术参数如表1所示。
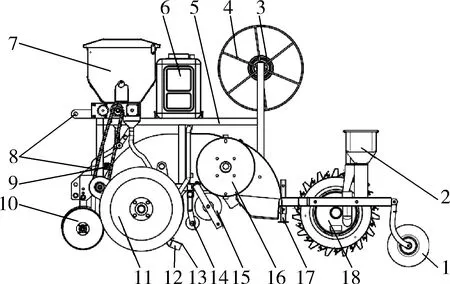
图1 双U型棉花精量播种机Fig. 1 Double U type cotton precision seeder1.镇压轮 2.种箱 3.滴灌带 4.滴灌带架 5.机架 6.药箱7.肥箱 8.三角悬挂架 9.变速箱 10.开沟器 11.行走轮12.滴灌带开沟器 13.土壤平整装置 14.滴灌带导向轮15.地膜 16.提土覆土装置 17.地脚 18.排种器
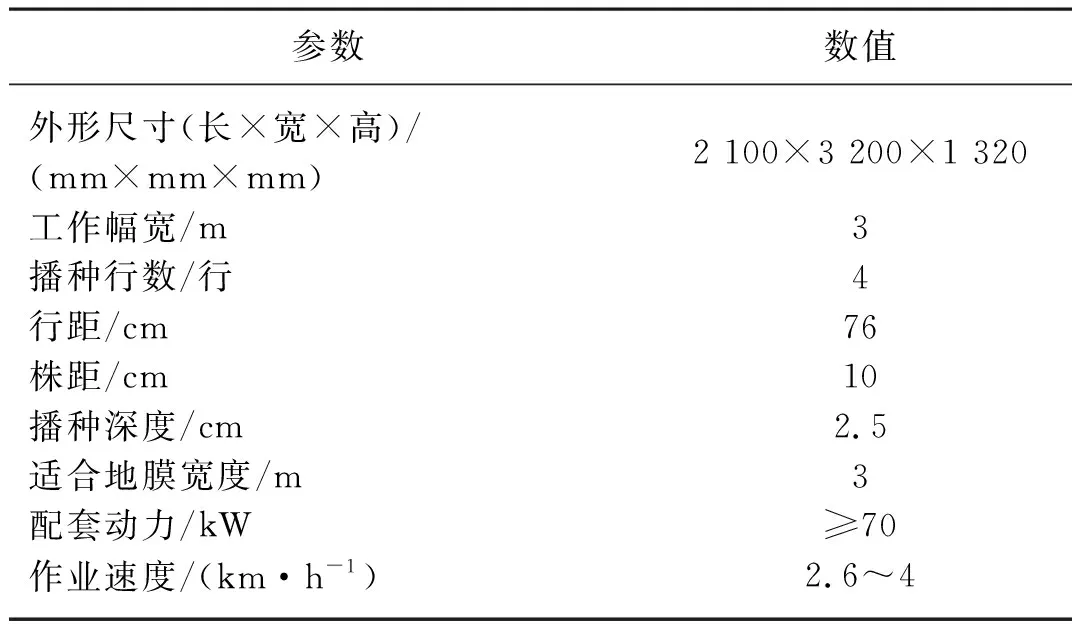
表1 双U型棉花精量播种机的主要技术参数Tab. 1 Main technical parameters of double U typecotton precision seeder
2 关键部件设计
2.1 排种器设计
排种器作为播种机上的重要部件,其结构设计的合理性直接影响着排种器的排种性能[6-7]。本机采用自主研发的勺轮鸭嘴式排种器,其结构简图如图2所示。排种器投种的工作过程如图3所示。
排种器半径的大小影响排种器的排种质量和排种效率[8]。合适的半径对于成穴机构的个数以及尺寸有着重要的作用,可以提高播种的质量和棉花的产量。如果排种器的半径过大,重量也会随之增加,会使整机的重量增加给运输和安装带来一定的弊端,同时成穴机构需要的强度会增大;若排种器的半径减小则排种器上成穴机构的数量就会减小,还会导致排种器的作业性能大大降低[9]。查阅资料可得:排种器的半径应该在160~300 mm之间,成穴个数与排种器的半径存在下列关系式
(1)
式中:n——排种器上成穴机构的个数;
l——播种的株距,mm;
R——排种器的半径,mm。
本文设计的排种器的成穴个数n=15,播种株距l=100 mm,计算得出R=214 mm,即排种器的半径为214 mm。
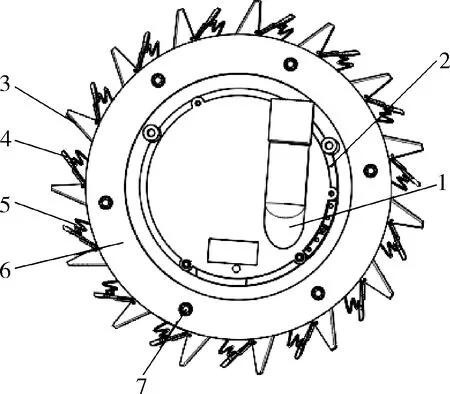
(a) 排种器主视图
(b) 排种器剖视图图2 排种器结构简图Fig. 2 Structure diagram of seed metering device1.种盒 2.壳体 3.定鸭嘴 4.动鸭嘴 5.鸭嘴压簧 6.滚动盘27.螺栓 8.隔板 9.导种轮 10.取种勺 11.排种器盖12.接种杯 13.滚动盘1 14.滚动轴 15.滚动盘固定座
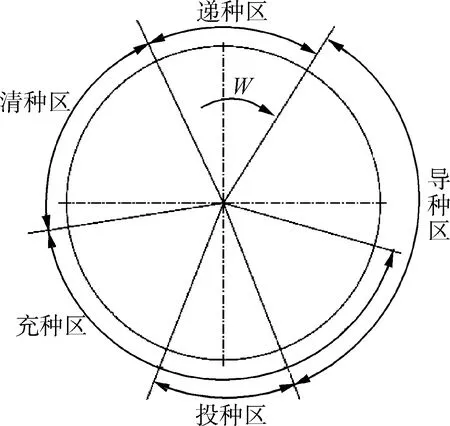
图3 排种器投种工作过程Fig. 3 Seed feeding process of seed metering device
在理想条件下排种器为纯滚动的运动状态,但在实际的作业过程中排种器的运动并非纯滚动,而是有一定的滑移运动。滑移量的大小直接影响着鸭嘴是否会扯膜,而滑移量的大小可以通过鸭嘴重合度的大小来决定[10]。因此,可以通过计算重合度的大小判断是否会出现扯膜。排种器的鸭嘴重合度是指从固定鸭嘴刚刚入土到动鸭嘴即将出土所转动的角度与排种器两相邻鸭嘴中心所对应的夹角之比,如图4所示。

图4 重合度简图Fig. 4 Diagram of coincidence degree
图4中A为定鸭嘴入土点;B为成穴机构在排种器正下方的点;C为动鸭嘴出土点;θ1为定鸭嘴与B点之间的夹角;θ2为动鸭嘴与C点之间的夹角。由图4可知:θ1<θ2,则(θ1+θ2)>2θ1,所以假设
(2)
式中:h——播种深度。
排种器上两相邻鸭嘴中心所对应的夹角θ0,与排种器上安装的鸭嘴个数有关,所以排种器上鸭嘴的重合度计算公式为
(3)
(4)
将式(2)和式(3)代入式(4)可得
(5)
由式(5)可知:排种器鸭嘴的重合度e与排种器的半径R、播种深度h以及成穴机构的个数n有关系,代入数值计算可得e=2.2,即e>1,所以实际工作中emax>e,满足行业的设计标准。
因此,排种器在工作过程中最大限度的减小滑移量则会降低成穴机构发生撕膜、挑膜的现象,保证了该机的播种质量。
2.2 提土覆土装置设计
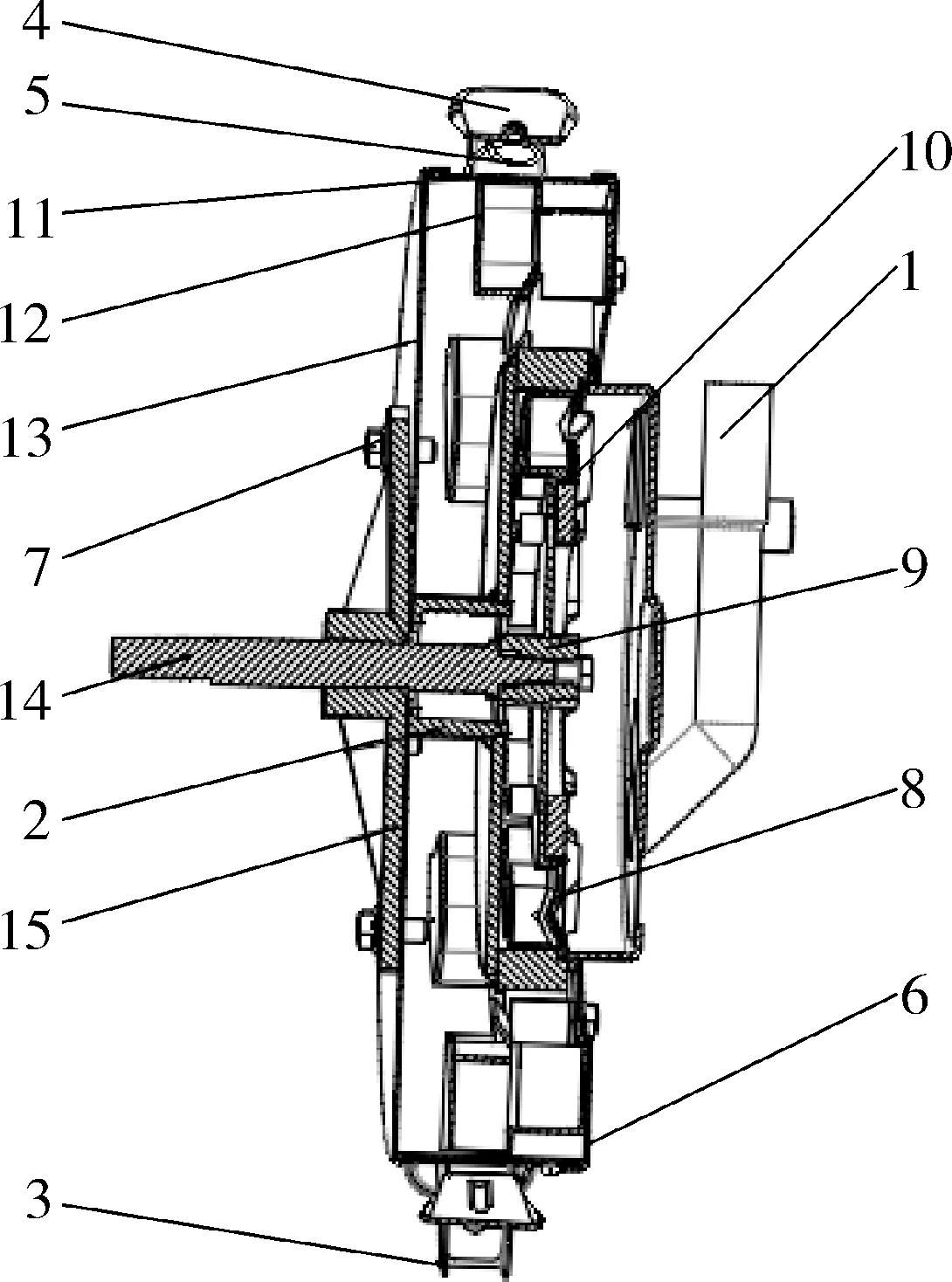
提土覆土装置是全膜双垄沟精量播种机联合作业的关键工作部件[11-12],主要由提土装置、覆土装置以及传动系统等组成,具体结构如图5所示。
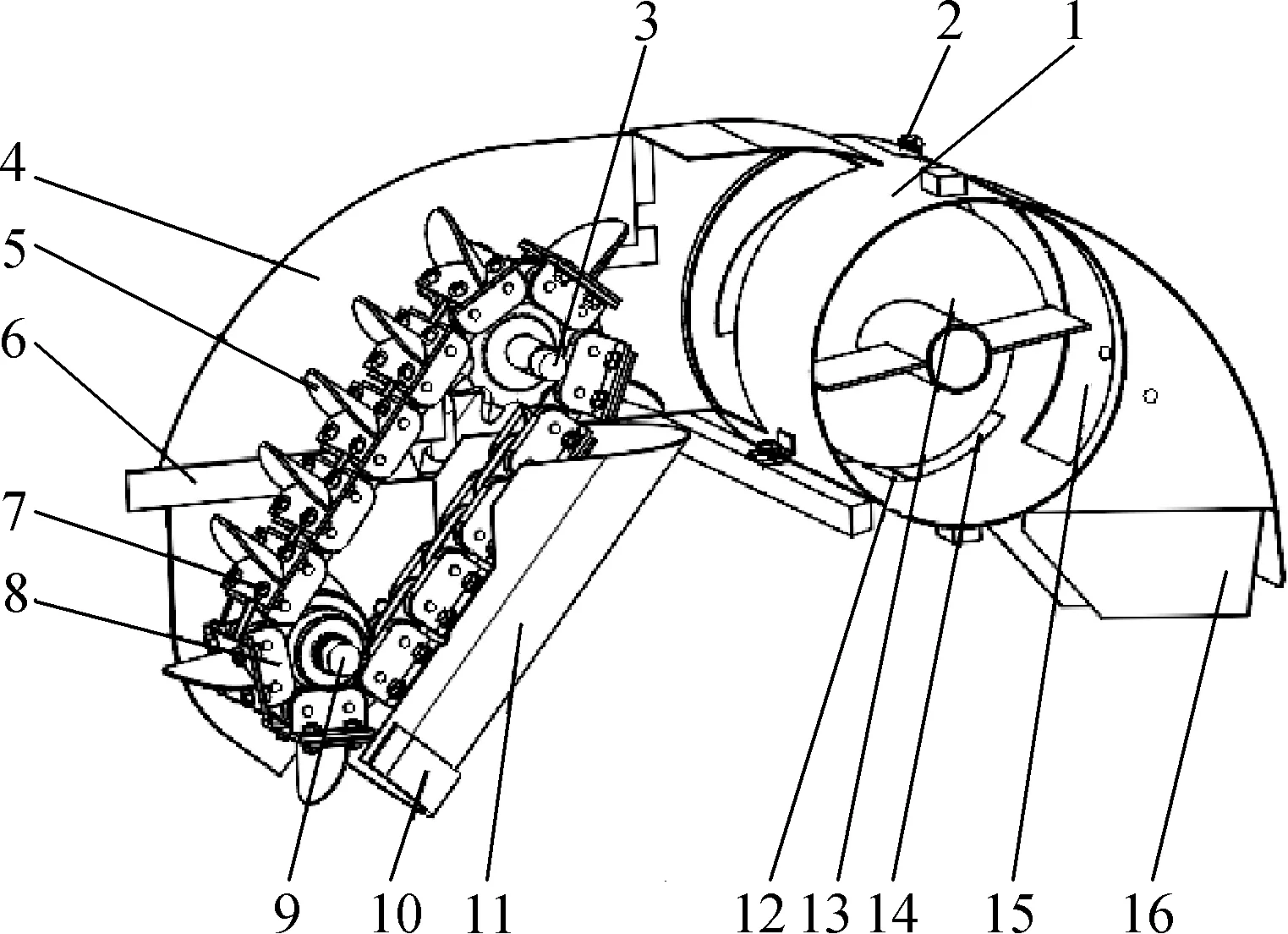
图5 提土覆土装置结构示意图Fig. 5 Structure diagram of soil lifting and covering device1.分土箱 2.观察孔 3.传动轴 4.侧板 5.挖土勺 6.机架7.螺栓 8.链条 9.从动轴 10.下护板 11.护土板12.出土口1 13.螺旋覆土装置 14.出土量调节板15.出土口2 16.导向板
工作过程:当精量播种机开始作业时,拖拉机把动力经过变速箱传递到提土覆土装置。提土装置完成土壤挖掘并倾斜输送,当土壤输送到螺旋覆土装置后,再进行覆土或向一侧推送,使得土壤在出土口处滑落,并均匀铺洒在地膜上,其出土量的大小可以由出土量调节板根据不同的土量需求调整合适的出土口大小;地膜两端的出土口可以根据不同的地膜宽度调整一定的出土角度,提高地膜的通用性。
2.2.1 挖土勺的运动分析
在从动轴处建立直角坐标系,从动轴的轴心为坐标原点。将机组前进的方向设为X轴的负方向,竖直向上为Y轴的正方向,挖土勺绕着从动轮逆时针转动。设挖土勺外边缘上一点为A(x,y),因为播种机的前进速度和挖土勺的旋转速度都是匀速,所以挖土勺上A点的运动轨迹方程可用方程表示
(6)
式中:R1——挖土勺上A点到从动轴的最大回转半径,m;
v——播种机的前进速度,m/s;
ω——挖土勺的角速度,rad/s;
t——工作的时间,s。
设A点的转动速度为v1,则v1=ω×R1;当转动角为θ时,则θ=ω×t;可得A点的轨迹方程为
(7)
式(7)表示为挖土勺的运动轨迹,即运动轨迹为余摆线的形式,则挖土勺的运动轨迹如图6所示。
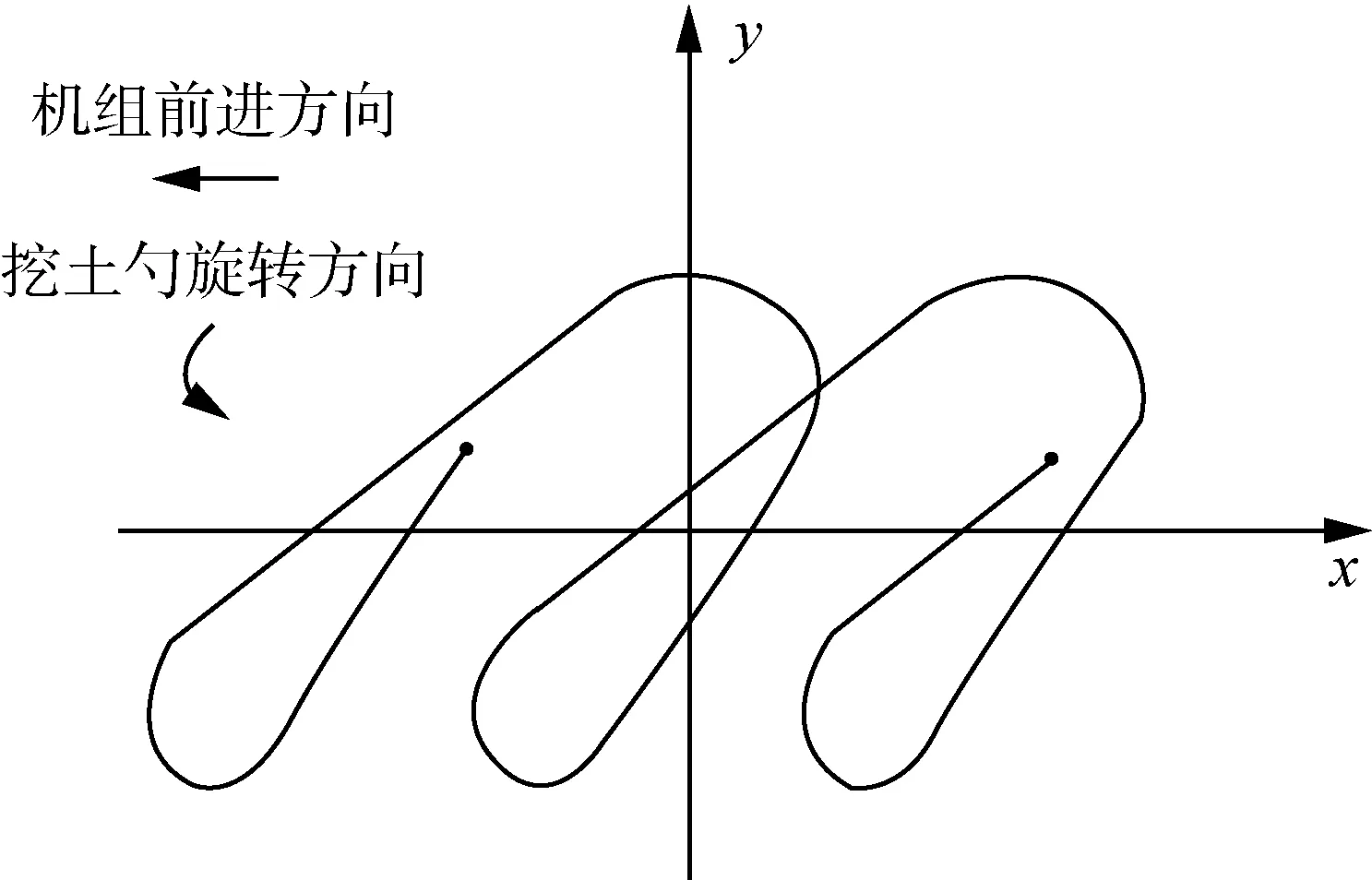
图6 挖土勺的运动轨迹Fig. 6 Movement track of scoop
2.2.2 覆土量的确定
播种机在进行垄沟膜顶覆土作业时,其垄沟膜顶单位时间内的覆土量
Q=γLbh1
(8)
式中:Q——垄沟膜顶覆土量,kg;
γ——土壤容重,取黄绵土为1 300 kg/m3[13];
L——单位时间内膜顶覆土长度,m/s;
b——膜顶覆土宽度,取0.1 m;
h1——膜顶覆土厚度,取0.02 m。
计算得出垄沟膜顶覆土量Q=2.9 kg/s。
两侧的覆土装置不仅要对播种带覆土还要对地膜边缘进行覆土,所以两侧的需土量比中间的需土量大,地膜边缘的覆土量与膜顶一致,经过绞龙推送后向地膜边缘均匀铺撒。设垄沟膜顶覆土量为Q,两侧覆土装置的需土量为Q1。则
Q1=2Q=5.8 kg/s
(9)
当螺旋覆土装置的转速为一定值时,不仅要满足膜上覆土量的要求还要满足相关的农艺要求。土壤轴向输送时,不考虑土壤在轴向发生阻滞的情况下,螺旋覆土装置的转速
(10)
式中:D——螺旋叶片外径,取0.1 m;
S——螺旋叶片的螺距,取0.1 m;
φ——螺旋覆土装置的填充系数,取0.5;
ε1——倾斜输送系数,取为1。
计算可得:螺旋覆土装置的转速n=0.2 rad/s。
2.2.3 挖土勺提升线速度的确定
为保证在进行膜上覆土时有足够的覆土量,不仅要考虑螺旋覆土装置的转速还要考虑挖土勺的提升线速度[14-16],该机挖土勺链式提土器的倾斜角为45°,则提升线速度
(11)
式中:B——挖土勺链式提升带宽度,取为0.14 m;
H——入土深度,取为0.07 m;
φ1——挖土勺链式提升带的填充系数,范围在0.75~0.97之间,取0.8;
k——倾斜系数,倾斜角度为45°,查表为0.4[17]。
计算得挖土勺链式提土器倾斜提升线速度V1=0.71 m/s。
3 有限元分析
3.1 成穴机构的静力学分析
成穴机构即排种器鸭嘴,建立其三维模型如图7所示。分析可知排种器上鸭嘴的重合度大于1,即在进行排种工作时前一个鸭嘴还未离开土壤时,后一个鸭嘴已经接触到土壤,因此假设该排种器鸭嘴在工作中单个鸭嘴独自受力,即在即将接触地面时定鸭嘴单独接触,定鸭嘴受力最大;在即将离开地面时动鸭嘴单独接触,动鸭嘴受力最大。在土壤中时定鸭嘴、动鸭嘴均受力,但都小于上述两种情况,只需对接触土壤和离开土壤的两种情况进行静力学分析即可。
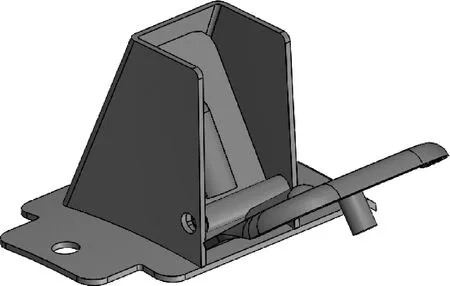
图7 鸭嘴三维模型图Fig. 7 Three dimensional model of duck bill
鸭嘴的材料为Q235,泊松比ε=0.288,密度ρ=7.86 g/cm3,弹性模量E=2.1×1011,分别对定鸭嘴和动鸭嘴进行静力学分析,得到的应变、应力结果如图8、图9所示。
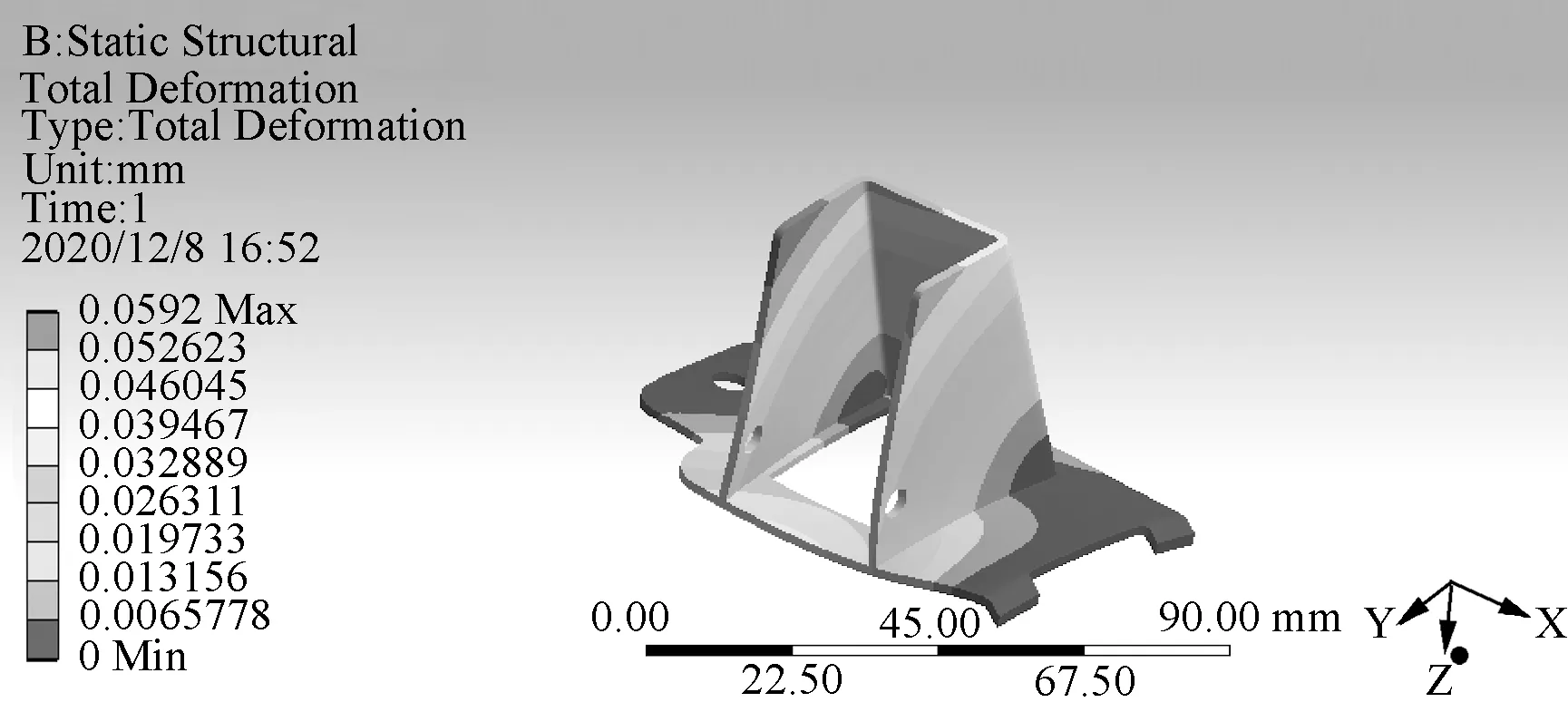
(a) 变形位移云图

(b) 等效应力云图图8 定鸭嘴的静力学分析图Fig. 8 Analysis diagram of fixed duck beak
1) 定鸭嘴刚刚接触到土壤时,按照上述操作得到的结果如图8所示。由图8可知,定鸭嘴的入土部位变形较大,最大应变为0.059 2 mm,对于Q235材料来说,该变形在弹性变形范围之内,载荷消失后可以恢复到初始的形状。定鸭嘴结构大部分区域的应力都很小,处于安全状态,最大应力集中在定鸭嘴与侧板的连接处,且最大应力值为76.253 MPa,小于定鸭嘴结构材料的最大屈服强度235 MPa。
2) 动鸭嘴刚刚要离开土壤时,按照上述操作得到的结果如图9所示。
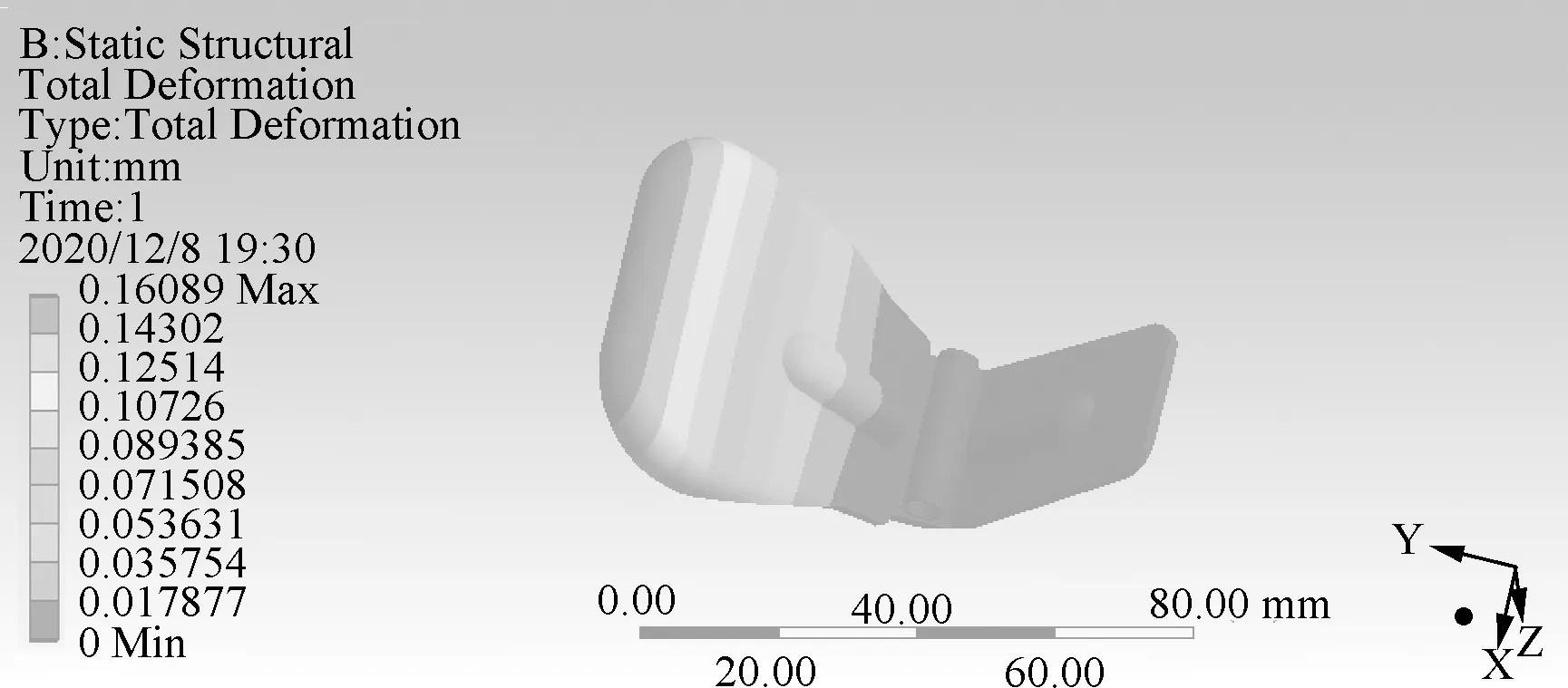
(a) 变形位移云图

(b) 等效应力云图图9 动鸭嘴的静力学分析图Fig. 9 Analysis diagram of movable duck beak
由图9可知,动鸭嘴的最边缘处变形较大,最大应变为0.160 89 mm,对于Q235材料来说,该变形在弹性变形范围之内,载荷消失后可以恢复到初始的形状。动鸭嘴结构大部分区域应力都很小,处于安全状态,最大应力集中在动鸭嘴的旋转处,其最大应力为95.452 MPa,小于定鸭嘴结构材料的最大屈服强度235 MPa。当动鸭嘴和排种器盖发生挤压时容易发生断裂,因此为了降低断裂风险应该适当增大鸭舌和螺丝套筒的夹角,减小应力的集中。
3.2 传动轴的模态分析
传动轴是提土覆土装置的重要工作部件,导入模型如图10所示。对传动轴进行模态分析得到的其振动特性对播种机的作业性能具有重要的参考价值[18]。共振现象会造成传动的不稳定,因此对传动轴进行模态分析,并对结果进行分析,可以验证设计的合理性。
图10 传动轴三维模型图Fig. 10 Three dimensional model of drive shaft
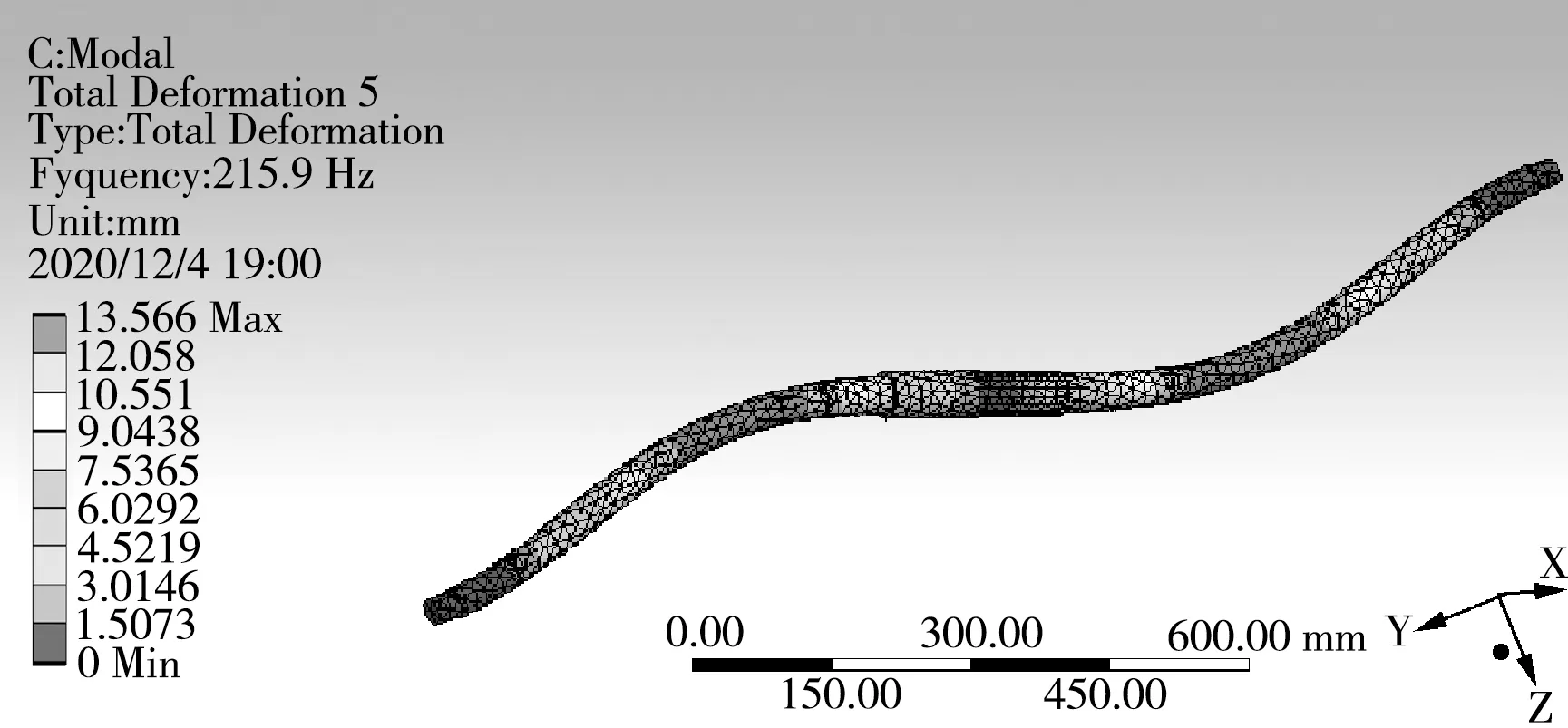
传动轴的材料选用优质碳素钢,弹性模量E=2.1×1011,密度ρ=7.8 g/cm3,泊松比ε=0.28,通过模态分析对传动轴进行求解,得到传动轴的前六阶模态振型图,如图11所示。
(a) 第1阶模态
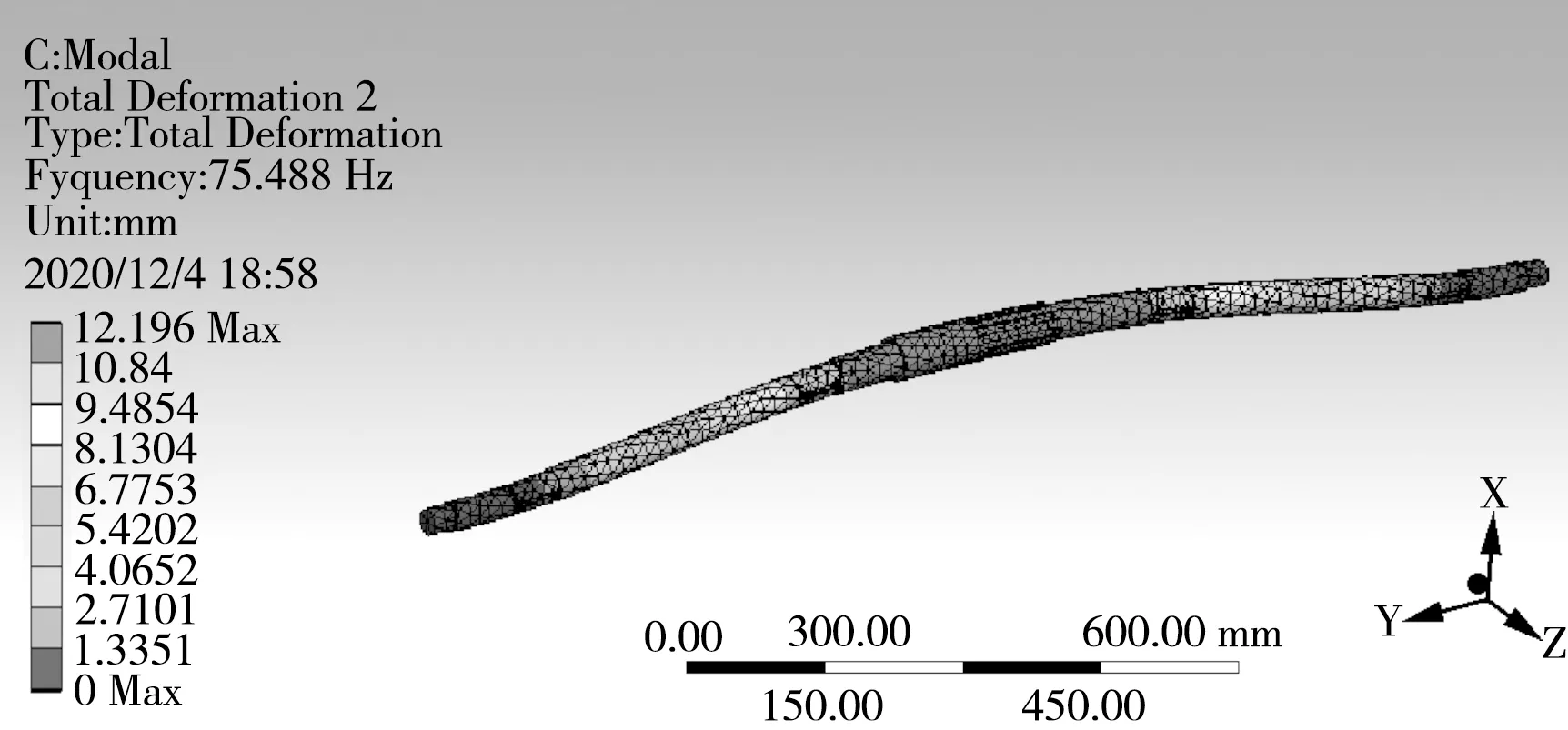
(b) 第2阶模态
(c) 第3阶模态

(d) 第4阶模态
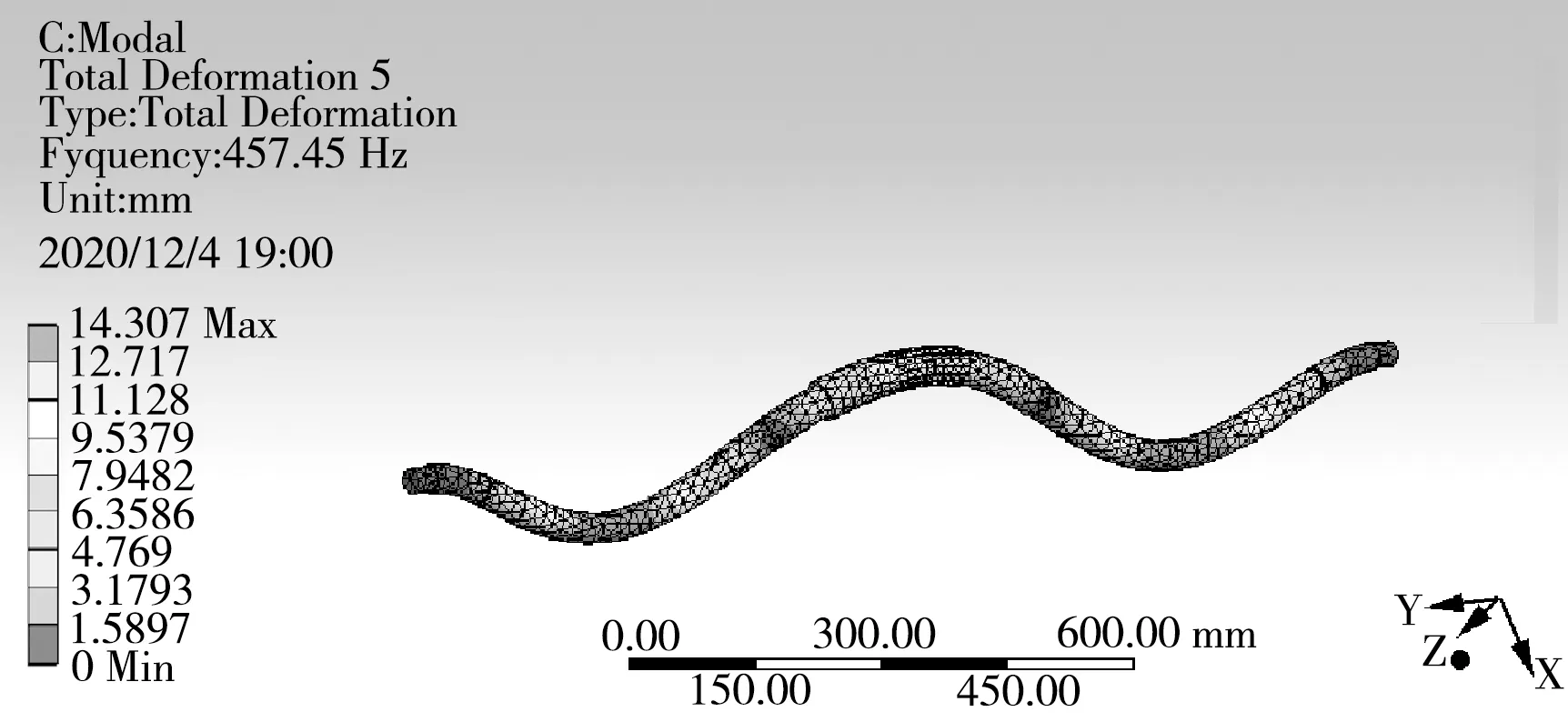
(e) 第5阶模态
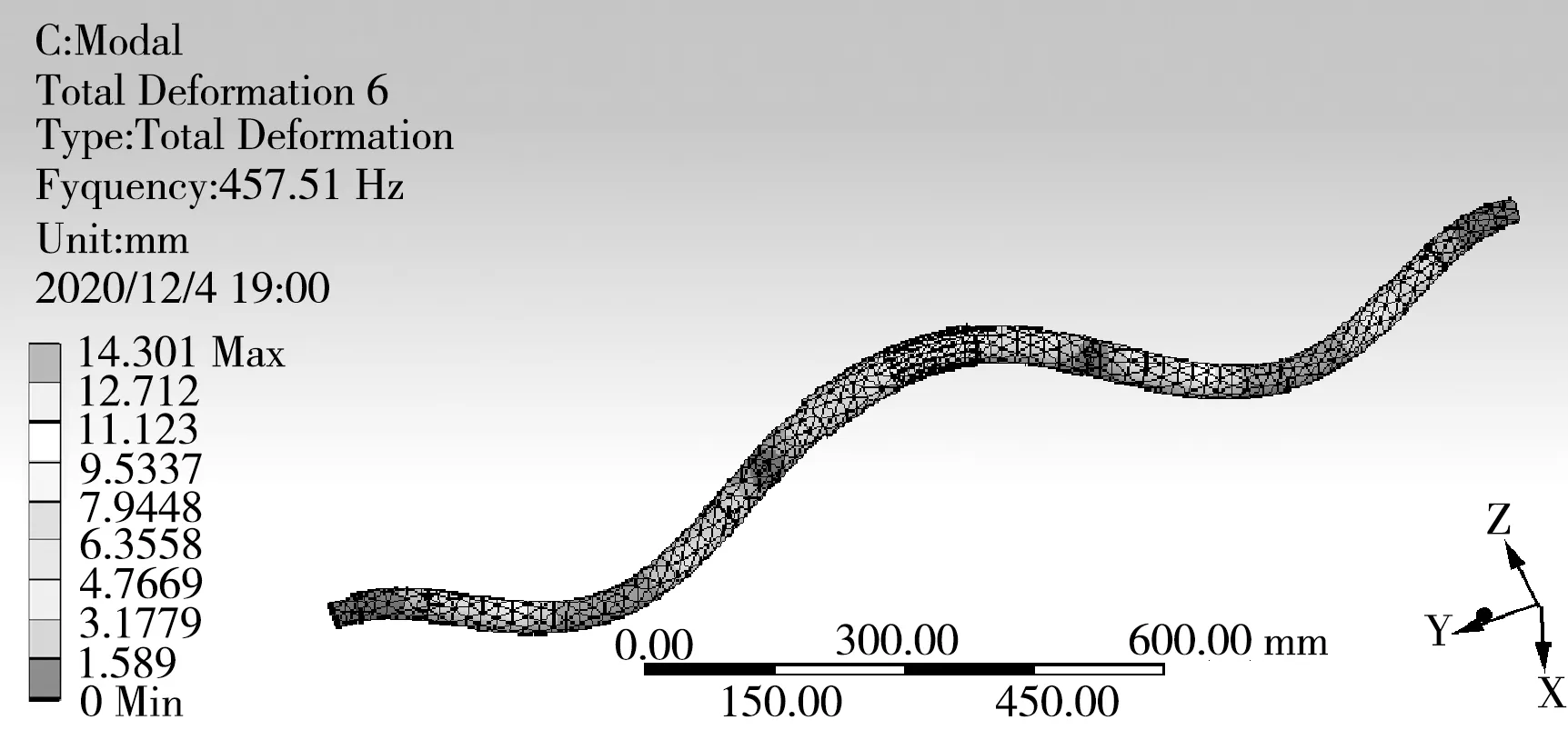
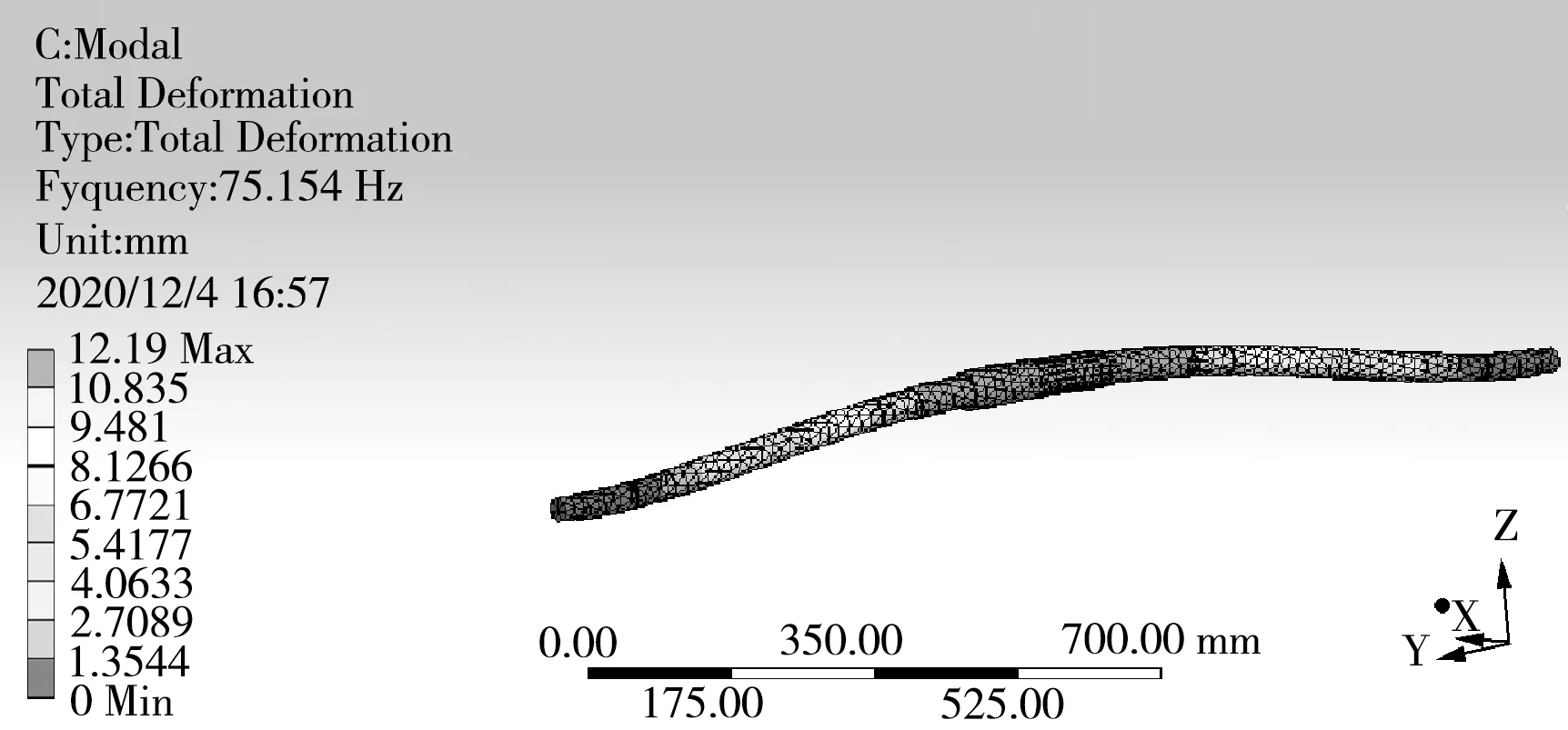
(f) 第6阶模态图11 传动轴1~6阶模态振型Fig. 11 Mode shapes of drive shaft from order 1 to 6
从图11可以看出:传动轴的一阶和二阶主要发生弯曲振动,三阶和四阶主要发生扭转振动,五阶和六阶主要发生扭转振动和弯曲振动的复合振动。
在不考虑工作环境和回转效应的影响下,传动轴的临界转速和横向振动的固有频率满足关系式[19]
ncr=60×f
(12)
式中:ncr——临界转速,r/min;
f——横向振动的固有频率为,Hz。
传动轴的前六阶模态的固有频率与其对应的临界转速如表2所示。

表2 固有频率与其对应的临界转速Tab. 2 Natural frequency and its corresponding critical speed
在有附加约束的条件下,该传动轴的最小固有频率为75.154 Hz,传动轴在工作时额定的转速大约为420 r/min,在该运行工况下,其转动基频为7 Hz,而此时传动轴的最小固有频率远远大于其转动基频,因此该传动轴在工作时不会发生共振的现象。
4 田间试验
4.1 试验条件
2020年11月28日在唐山市滦南县奔城镇周官寨村(河北永发鸿田农机制造有限公司试验基地)对双U型棉花精量播种机进行了性能测试,田间试验如图12所示。试验品种为金字棉802号,百粒重11.4 g,种子含水率为11.5%,原始破损率为0.1%,土壤绝对含水率为18.8%,配套动力为JZB-404A型拖拉机,作业速度为2.9 km/h。

图12 田间试验Fig. 12 Field test
4.2 试验方法
试验主要依据是JB/T 7732—2006《铺膜播种机》和NY/T 1559—2007《滴灌铺管铺膜精密播种机质量评价技术规范》以及GB/T 5668—2008《旋耕机》的试验标准进行田间性能的试验。播种作业完成后,按照JB/T 7732—2006 《铺膜播种机》和GB/T 5668—2008《旋耕机》的作业标准对播种机的作业性能的测定要求,计算机具的耕深、空穴率以及种子的破损率等试验数值。
4.3 试验测定
试验田地共10个作业区,每个作业区22 m×8 m。测定点选择该区域内的所有的穴孔,用钢卷尺、钢板尺等工具进行人工测量,剖开土壤获取种子覆土厚度深度、每个穴孔中的种子数、种子破损个数以及空穴的个数。
(13)
(14)
(15)
(16)
式中:f——总测定的穴孔数,个;
Q1——种子覆土厚度深度合格率,%;
f1——种子覆土厚度深度合格穴数,个;
Q2——空穴率,%;
f2——空穴的个数,个;
Q3——种子机械破损率,%;
f3——种子破损数,个。
Q4——穴粒数合格率,%;
f4——种穴内种子数合格的个数。
4.4 试验结果
田间试验结果如表3所示。由试验结果可知,播种空穴率为1.6%,种子机械破损率为0.1%,穴粒数合格率为96.2%,种子覆土深度合格率为97.5%,采光面机械破损程度为16.8 mm/m2,采光面宽度合格率为93.6%。该机具的各项指标基本达到设计和相关标准的要求,机具在田地的试验效果整体良好,可以完成预期的工作,且该机的作业稳定性好、工作效率高。
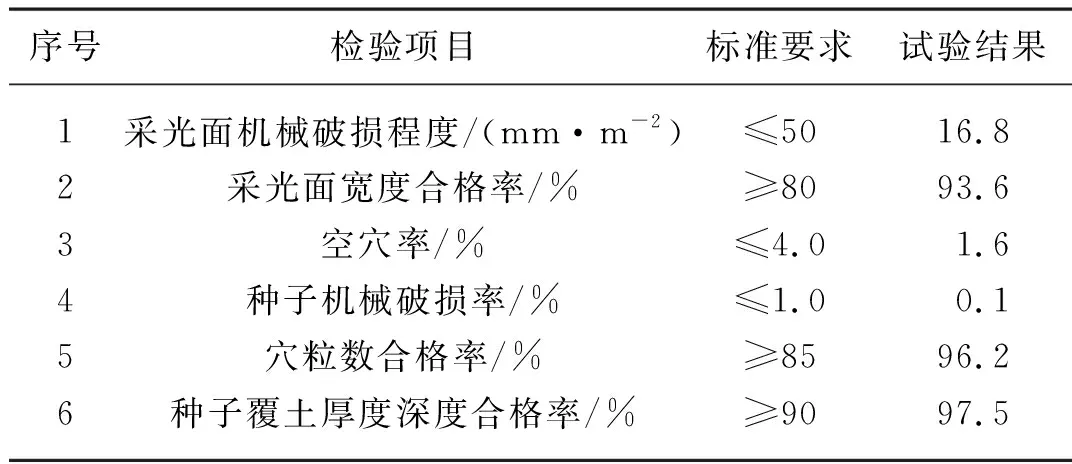
表3 双U型棉花精量播种机试验结果Tab. 3 Test results of double U type cotton precision seeder
5 结论
1) 根据机采棉的种植要求,设计了双U型棉花精量播种机。一次性可以完成开沟、施肥、喷药、铺设滴灌带、仿形、铺膜、播种、镇压等作业,并且工作稳定可靠,工作效率高。该机结构紧凑、机动性强、播种精度高。双U型棉花精量播种机采用鸭嘴式排种器,实现了精量播种;采用提土覆土装置进行双U型垄的形成,达到了节水的目的。
2) 进行了关键部件设计以及工作过程分析。分别对排种器、提土覆土装置进行了相关参数的计算。排种器的半径为214 mm,成穴机构有15个,膜顶覆土量为2.9 kg/s,螺旋覆土装置的转速为0.2 rad/s,提升的线速度为0.71 m/s。
3) 用Ansys软件对成穴机构进行静力学分析、对传动轴进行模态分析。定鸭嘴最大应变为0.059 2 mm,最大应力值为76.253 MPa;动鸭嘴最大应变为0.160 89 mm,最大应力为95.452 MPa;传动轴最小固有频率为75.154 Hz,大于传动轴稳定工作下的转动频率,工作时不会发生共振现象。由分析结果表明,在设计和制造过程中应加强定鸭嘴边缘处的强度以及减少动鸭嘴转轴处的应力集中;传动轴的转速和结构设计合理并且在后续研究中,可以适当地提高传动轴的工作转速,提高工作效率。
4) 田间试验结果表明:设计的双U型棉花精量播种机作业性能稳定,穴粒数合格率为96.2%,空穴率为1.6%,种子机械破损率为0.1%,种子覆土厚度深度合格率为97.5%,采光面机械破损程度为16.8 mm/m2,采光面宽度合格率为93.6%,各项指标都满足行业的设计标准。
猜你喜欢
新疆农机化(2022年1期)2022-03-02
河北农机(2021年11期)2021-11-29
百科探秘·航空航天(2021年4期)2021-05-06
家教世界·创新阅读(2021年1期)2021-03-11
家教世界(2021年1期)2021-03-01
家教世界·创新阅读(2020年12期)2020-01-11
孩子·小学版(2019年11期)2019-09-10
时代农机(2019年5期)2019-02-11
农业工程学报(2018年24期)2019-01-14
农业机械学报(2018年11期)2018-12-04
