基于高速摄影技术穴盘苗抛投运动试验与分析
2021-11-09 10:47:50曾繁地李旭英张永志
中国农业大学学报 2021年9期
曾繁地 李旭英 李 祥 苏 强 张永志
(内蒙古农业大学 机电工程学院,呼和浩特 010000)
农业生产的多元化发展对农作物的栽植效率提出了更高的要求。随生产规模的扩大,广大农民也迫切需要高效移栽机械满足生产需求。由于吊杯式移栽机可以满足作物铺膜移栽种植的要求,能独立完成打穴、栽苗、覆土、镇压、浇水等作业,在我国西北地区得到了广泛应用[1-4]。该移栽机工作时,人工将穴盘苗放入喂苗机构,穴盘苗随喂苗杯转动,当穴盘苗到达落苗口时,穴盘苗被抛入栽植器,但存在穴盘苗不能准确进入栽植器内部的问题[5]。对喂苗机构的设计和优化建模已有诸多研究,日本PVH1TC烟草移栽机采用回转式喂苗机构,人工将钵苗放入缓慢运动的圆周分布的喂苗筒中,当喂苗筒运动至栽植器的上方,落苗口打开,钵苗落入鸭嘴栽植器中[6];澳大利亚Willimes公司研制出的全自动钵苗移栽机,钵苗依靠自身重力自动滑落进入导苗管中,从而完成移栽作业,但容易造成钵苗成活率较低的问题[7];Dihingia P C等[8]制造了一种半自动钵苗移栽机,通过人工将秧苗放在传送带上,经过输送机运送到料斗式栽植装置,在垂直方向上完成秧苗栽植;Zhao X等[9]提出一种用于喂苗机构的新型高阶非圆齿轮传动,建立了非对称传动比的数学模型,并进行了喂苗试验,试验结果表明自动喂苗机构大大提高了自动移栽效率;Sivakumar等[10]研制了一种重力喂入式自动移栽机,秧苗通过重力下降,不会对幼苗造成损害;Nandede B M等[11]设计了多级旋转杯式喂苗机构,选用株高为80~110 mm的番茄、茄子和辣椒秧苗进行喂苗试验,结果表明移栽机前进速度为0.6~2.2 km/h时,喂苗装置的进料效率、输送效率、种植效率和整体效率的平均值均高于90%,当速度为3.2 km/h时,不适合移栽作业;刘洋等[12]在吊杯式移栽机基础上设计了双工位喂苗系统,通过连杆机构反复打开喂苗筒进行投苗,但工作效率不高;郭警伟等[13]对番茄自动移栽机有序投苗系统进行了研究,并进行了关键工作部件参数的优化;刘姣娣等[14]对接苗过程中的苗钵与栽植器发生碰撞进行分析,建立了钵体与栽植嘴的数学模型;金鑫等[15]对栽植器接苗、落至栽植器底部的运动过程进行高速摄影分析,并建立各个阶段的动力学模型;姚颖杰[16]采用仿真方式研究水稻抛秧过程钵苗运动,并通过高速摄影验证。对于吊杯式移栽机,栽植器、喂苗机构相对机做架旋转运动,且穴盘苗被喂苗机构抛投时,下落的轨迹受穴盘苗质量、穴盘苗植株高度和喂苗杯速度等因素的影响,将直接影响栽植器接苗的准确性。
已有研究主要集中在喂苗机构设计和穴盘苗与栽植器碰撞方面,对喂苗机构抛投穴盘苗的运动规律研究较少。本研究拟采用高速摄影技术和图像后处理技术,对穴盘苗从喂苗机构落苗口到栽植器的运动轨迹进行分析,探究栽植器接苗时穴盘苗的分布区域,并采用响应面法获得最佳匹配参数,以期为吊杯式移栽机的优化设计提供参考。
1 材料与方法
1.1 试验材料
为提高油葵种子发芽率,采用催芽后的油葵种子进行育苗。油葵穴盘苗育苗基质由草炭、蛭石、珍珠岩组成,体积比为3∶1∶1。在温室大棚进行育苗,采用“干湿交替”法对穴盘苗浇水,待穴盘苗长出两叶一心,苗龄约达到40天时[17-18],为了增强穴盘苗的抗逆性,对其进行炼苗,然后进行田间移栽。适栽期的油葵穴盘苗见图1。对同一生长环境下的油葵穴盘苗进行秧苗植株形态分析,测得50、72、128穴盘的油葵穴盘苗平均高度为273.02、216.6、177.96 mm,叶面展幅平均值为101.94、94.82 mm、73.26 mm,穴盘苗质量为16~25、9~17、4~9 g。

图1 油葵穴盘苗Fig.1 Oil sunflower plug seedlings
1.2 试验设备及方法
1.2.1吊杯式移栽试验台
本研究采用自主研制的吊杯式移栽试验台(图2)进行试验。试验台主要由喂苗杯、喂苗机构、栽植机构、栽植器、变频器、减速电机、机架等组成。试验时调整变频器频率改变栽植器转速,通过链传动使喂苗机构同步转动,人工将穴盘苗投入喂苗机构,穴盘苗随喂苗杯转动,当到达落苗口时落苗底板打开,穴盘苗被投入栽植器中,随栽植器到达安装盘底部时,鸭嘴在凸轮的作用下打穴,穴盘苗栽入土壤中完成移栽[19]。

1.喂苗杯;2.喂苗机构;3.栽植器;4.栽植机构;5.减速电机;6.变频器;7.机架1.Feeding cup; 2.Feeding mechanism; 3.Planter; 4.Planting mechanism; 5.Gear motor; 6.Frequency changer; 7.Frame图2 吊杯式移栽试验台Fig.2 Hanging cup transplanter test
1.2.2高速摄影系统的搭建及标定
高速摄影系统主要包括Pco.dimax S4型高速摄影机、计算机及Pco处理软件和白色幕布。试验过程中,人工将油葵穴盘苗放入喂苗杯中,穴盘苗随着喂苗杯一起运动当穴盘苗运动到落苗口时,被抛入栽植器中,采用高速摄影机拍摄并记录穴盘苗抛投进入栽植器的运动过程,并利用TEMA软件分析穴盘苗抛投运动。
在配有链排式喂苗机构的吊杯式移栽试验台上进行投苗试验,用高速摄影机进行拍摄并利用TEMA软件进行图像后处理[20],分析穴盘苗高度、穴盘苗质量和喂苗杯速度等因素对穴盘苗抛投运动轨迹的影响,探究栽植器接苗时穴盘苗的分布区域,需要在吊杯式移栽试验台上建立二维坐标系,进行系统标定,以确定图像中位移与实际位移的关系。为了便于TEMA软件后期图像处理,运用3D打印技术,打印相同规格的苗坨外壳,将穴盘苗放入其中,并在苗坨外壳的中心点作标记,观察标记点运动规律。通过测量其实际距离与图像中的影像距离可以得到该系统的比例尺[21],计算公式为:
(2)
式中:R为实际尺寸与图中尺寸的比例,m/像素;La为固定标记点实际尺寸,m;Lb为固定标记点在图中尺寸,m。
试验过程中将高速摄影机固定在三脚架上,使光轴线垂直于抛投运动平面,并调整光圈及三脚架高度,保证可以完整拍摄穴盘苗抛投运动轨迹,同时,调整镜头与标定点所在平面的距离为1 280 mm,设置采样频率为500 帧/s(图像分辨率:1 280像素×1 024 像素),相邻两张照片的时间间隔为0.002 s。
1.2.3试验方法
采用Design-expert 8.0.6的Box-Behnken模块设计3因素3水平的正交试验,穴盘苗抛投运动试验因素与水平见表1。以投苗准确率作为响应值,共进行17组试验,以3次重复的平均值为试验结果。
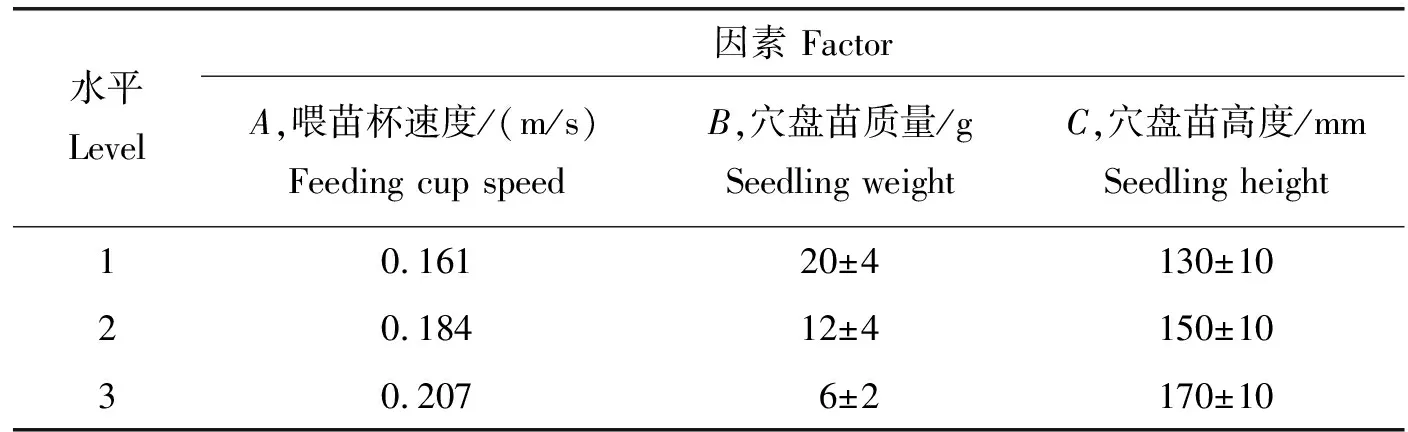
表1 穴盘苗抛投运动试验因素与水平Table 1 Factors and level of accuracy test of plug seedling throwing motion
投苗准确率为穴盘苗抛投进入栽植器内部的数量与每组试验投苗总数量之比,计算公式为:
(1)
式中:Y为投苗准确率,%;Y1为准确进入栽植器的穴盘苗数量,个;Y2为每组试验投苗总数量,个。
2 高速摄影试验结果与分析
2.1 不同高度穴盘苗抛投运动分析
选择128穴盘苗,喂苗杯速度为0.184 m/s,接苗角一定时,穴盘苗高度(h)分别为h<130、130
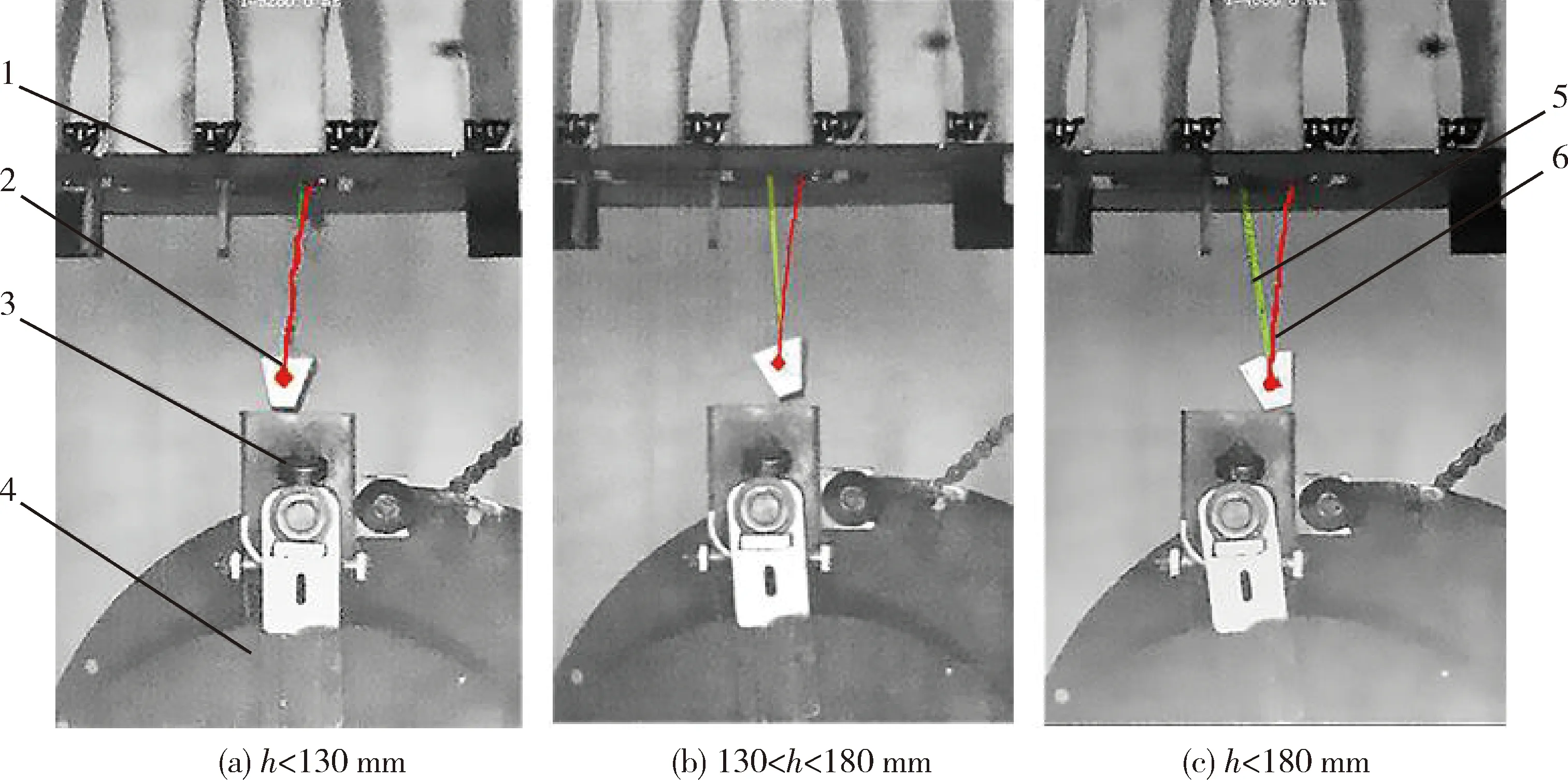
1.喂苗机构;2.穴盘苗;3.栽植器;4.栽植机构;5.穴盘苗运动姿态;6.穴盘苗运动轨迹1.Feeding mechanism; 2.Plug seedlings; 3.Planter; 4.Planting mechanism; 5.The movement morphological of the seedlings; 6.The movement track of seedlings图3 不同高度的穴盘苗运动轨迹Fig.3 Movement trajectories of the different height of plug seedlings
栽植器接触的部位不同,表明穴盘苗高度对穴盘苗抛投运动规律有显著影响,直接影响穴盘苗投苗准确率。
2.2 不同规格穴盘苗抛投运动分析
接苗角一定,喂苗杯速度为0.184 m/s,穴盘苗植株高度h<130 mm时,探究不同规格(50、72、128穴盘)穴盘苗的运动规律,结果见图4:当接苗角、穴盘苗抛投速度和植株高度一定时,不同规格穴盘苗抛投运动过程中竖直方向运动影响较小,但对水平方向位移影响较大。
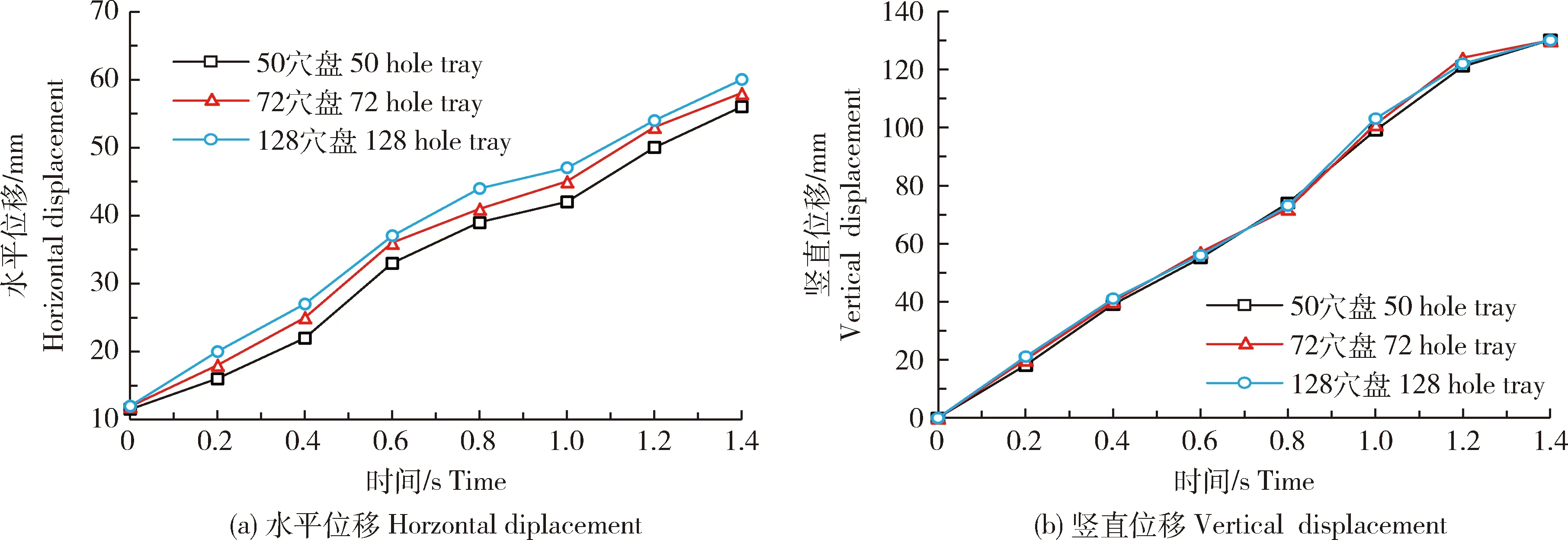
图4 不同规格穴盘苗的运动轨迹Fig.4 Movement trajectories of the different sizes of plug seedlings
2.3 不同喂苗杯速度穴盘苗抛投运动分析
接苗角一定,采用128穴盘、植株高度为130~180 mm的穴盘苗,用高速摄影机拍摄喂苗杯速度为0~0.253 m/s时抛投试验过程,用TEMA软件对其进行分析,试验结果见表2。
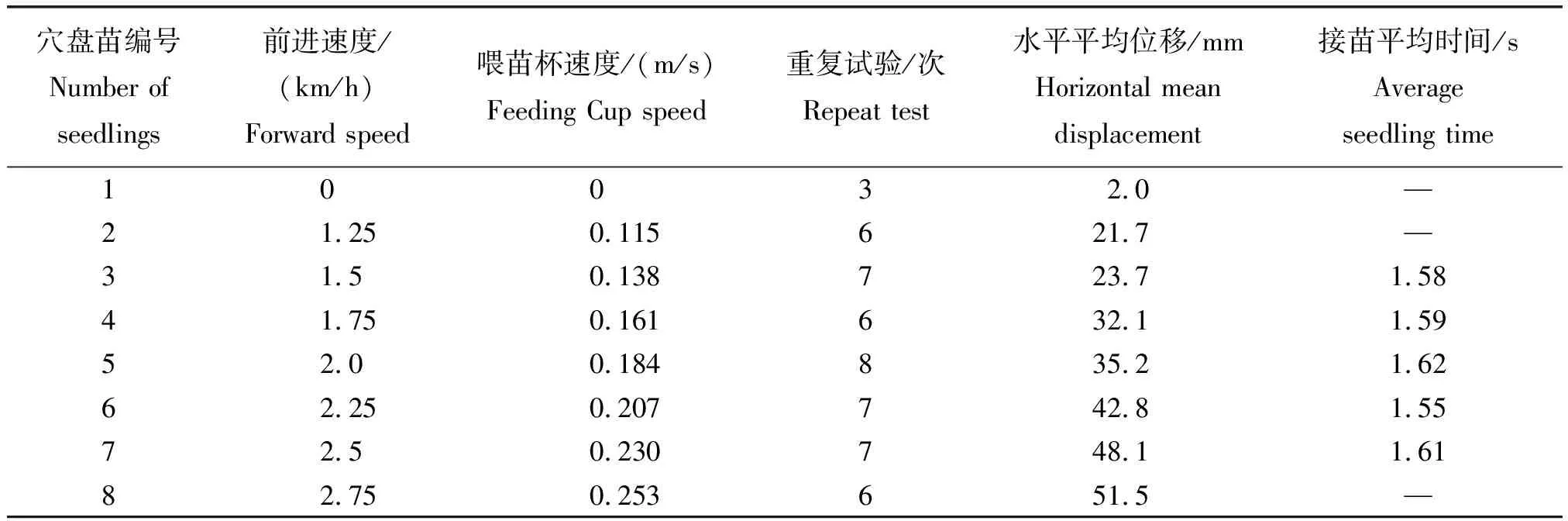
表2 不同喂苗杯速度下穴盘苗掉落水平距离及掉落时间Table 2 Horizontal distance and drop time of seedlings with different speed of feeding cup
高速摄影拍摄抛投姿态,分析得到不同喂苗杯速度下的穴盘苗抛投运动轨迹见图5。当接苗角、穴盘苗质量和高度一定时,随喂苗杯速度增大,栽植器的接苗区域变大,其中1点表示喂苗杯速度为0 m/s 时,穴盘苗自由下落;2、8点表示栽植器未接住穴盘苗;3、7点表示穴盘苗与栽植器发生碰撞,掉落到栽植器外;4、5、6点表示穴盘苗准确进入栽植器内,其中5点接苗状态较好。
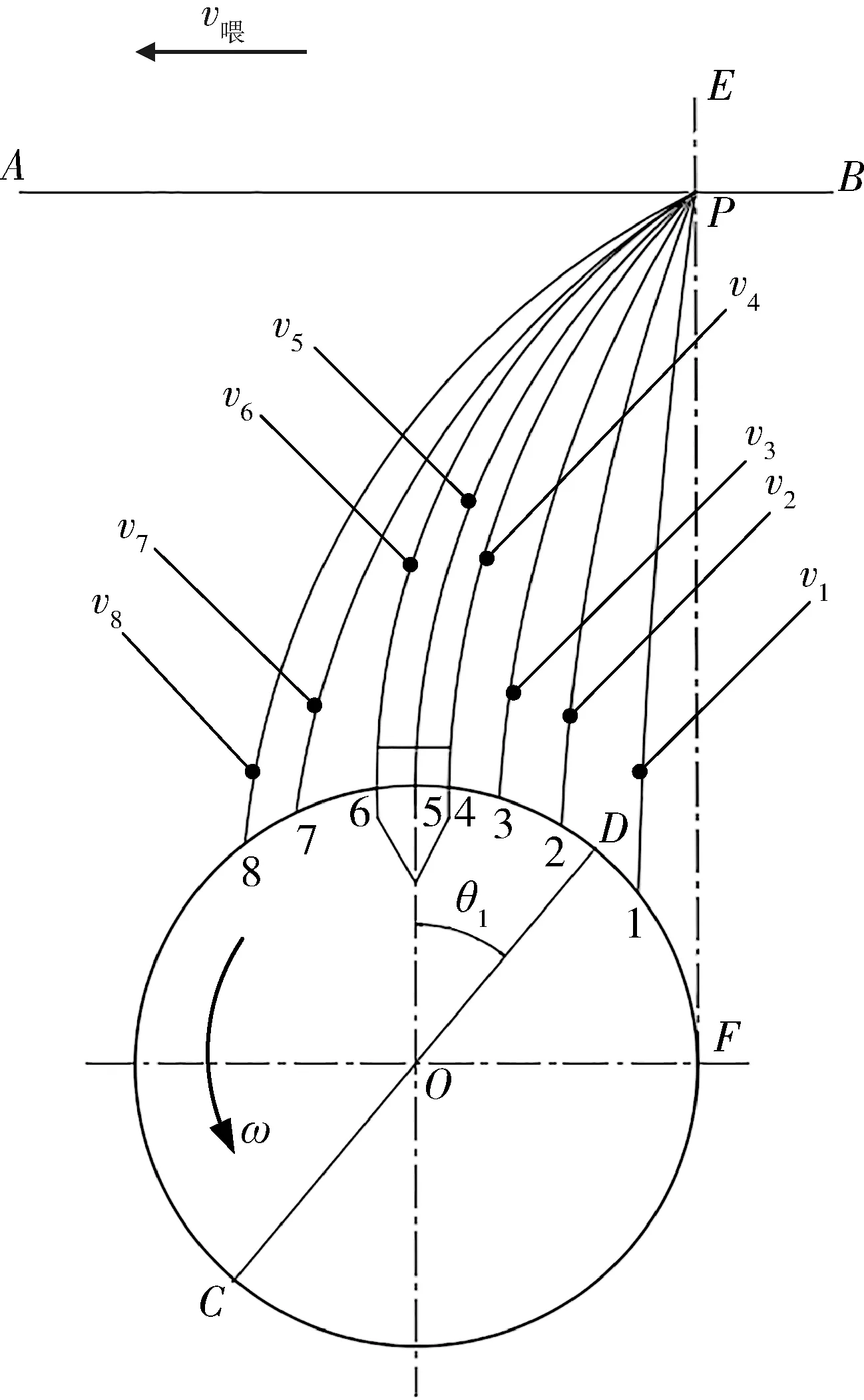
AB为喂苗机构底板线;P为喂苗机构投苗时落苗口位置;O为栽植器的回转中心;D为喂苗杯活动底板即将打开时吊杯所在位置;CD为栽植器回转直径;EF为过点P垂直AB的中心线。θ1为栽植器的接苗角;v喂为喂苗杯的速度;v1,v2,…,v8为不同喂苗杯速度下穴盘苗抛投轨迹。AB is the bottom line of feeding mechanism; P is the starting point of the seedling mouth when the feeding mechanism throws the seedlings; O is the rotary center of the planter; D is the position of the feeding cup when the movable bottom plate is about to be opened; The CD is the swing diameter of the planter; EF is the center line through P perpendicular to AB; θ1 is the seedling angle of the planter; v喂 is the speed of feeding cup; v1,v2,…,v8 are the throwing tracks of the point seedlings at different speed of feeding cup.图5 不同喂苗杯速度下穴盘苗的运动轨迹示意图Fig.5 Movement trajectory schematic diagram of the plug seedlings at different velocities
图6示出水平位移随喂苗杯速度的变化曲线。可见,随着喂苗杯速度逐渐增加,穴盘苗的水平平均位移逐渐增大。水平平均位移的拟合方程为y=-0.545 8x2+11.328x-4.919 6,R2=0.966 1,拟合效果良好。
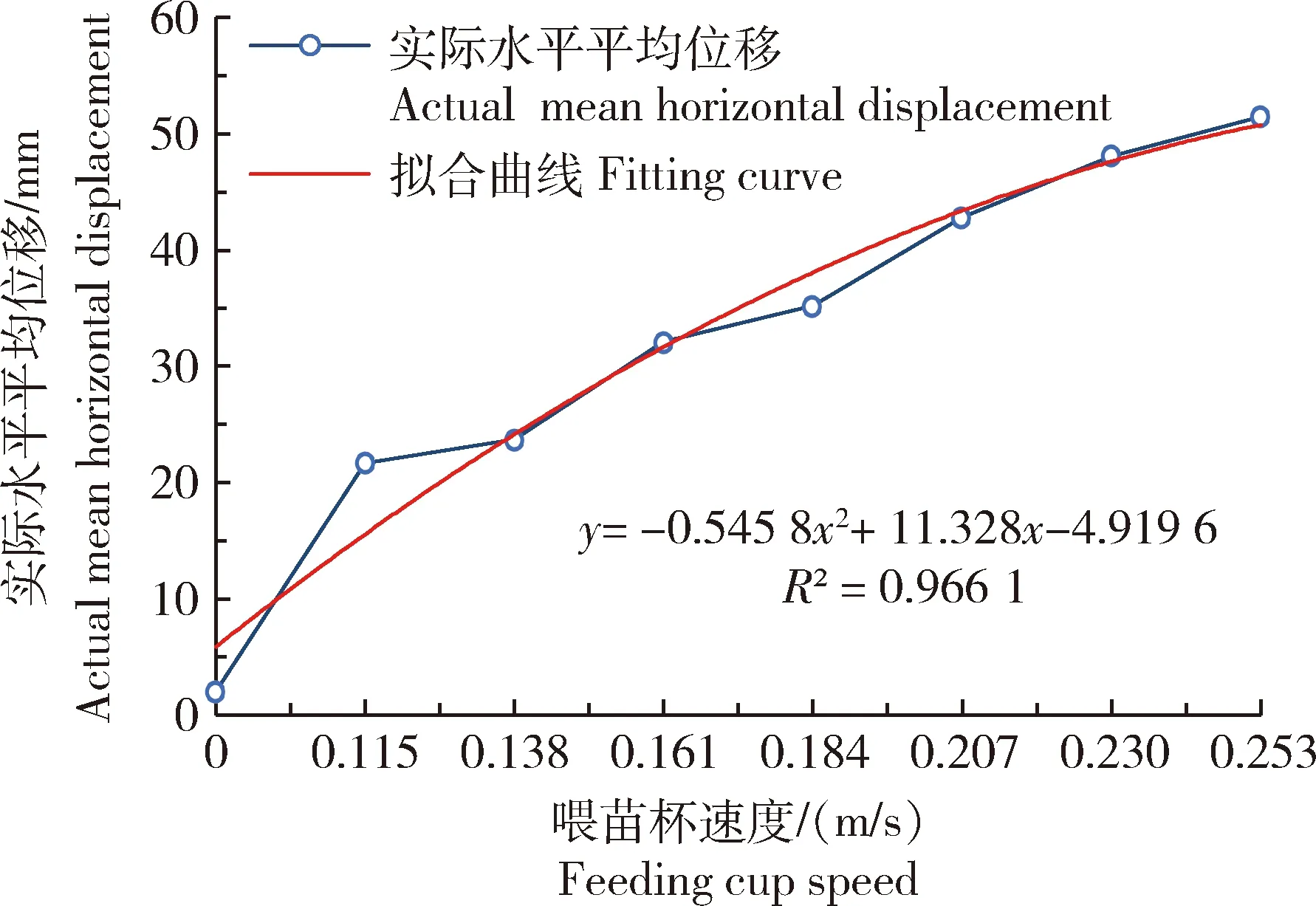
图6 喂苗杯速度对水平平均位移的影响Fig.6 Influence rule of feeding cup velocity and mean horizontal displacement
穴盘苗自由下落时的水平位移为2 mm,不同速度抛出的穴盘苗水平位移主要集中在[30,50] mm(图7)。通过TEMA软件进行图像后处理得到不同喂苗杯速度下喂苗机构落苗口起点位置P相对于栽植器接苗点的水平平均位移(L),可知在32.1 mm≤L≤42.8 mm区域内栽植器可以接住穴盘苗;当L<32.1 mm时,穴盘苗抛投运动的水平平均位移小于栽植器接苗水平平均位移,穴盘苗掉落到栽植器后方;L>42.8 mm时,穴盘苗抛投运动的水平平均位移大于栽植器移动接苗水平平均位移,穴盘苗掉落到栽植器前方。
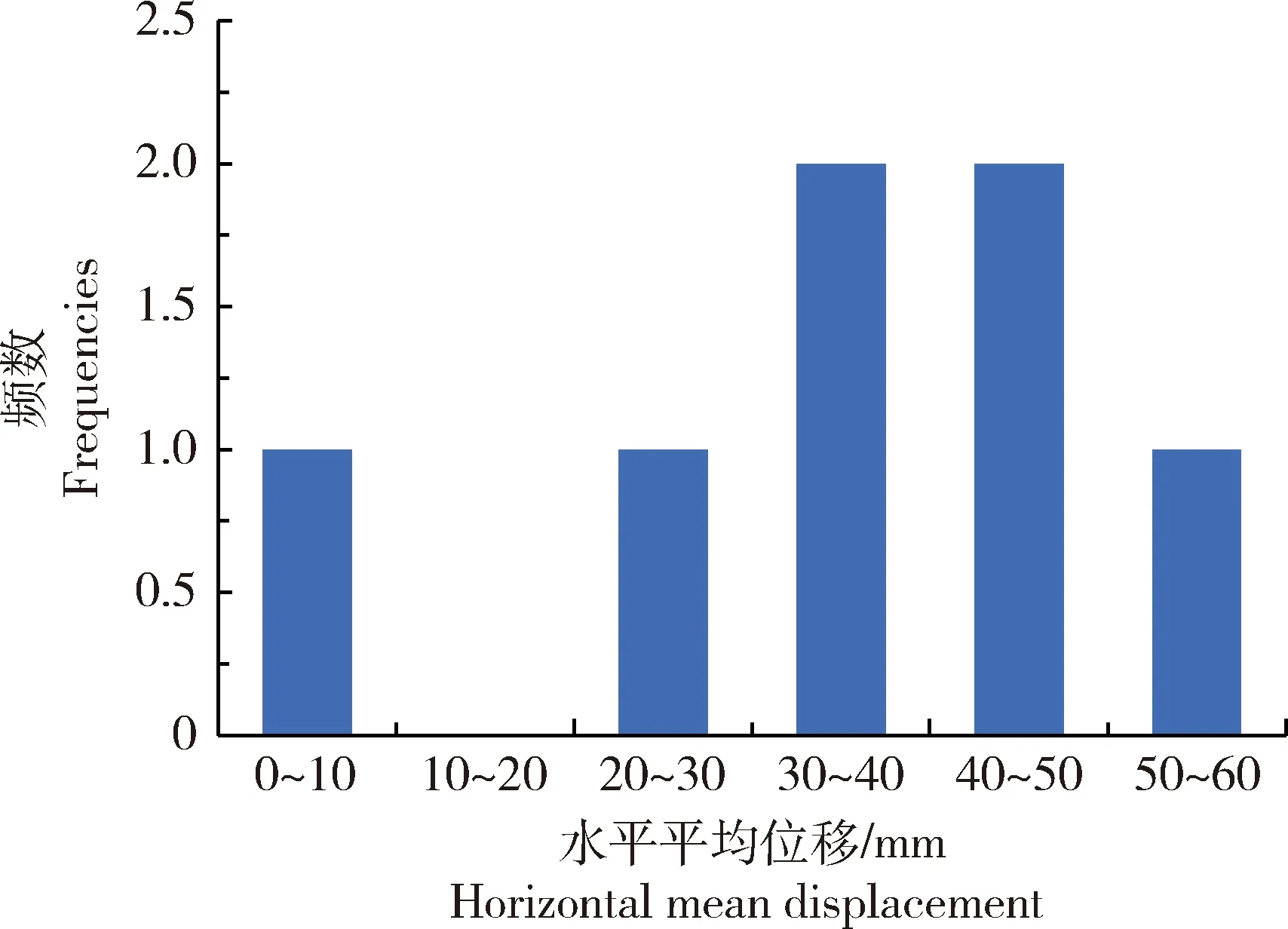
图7 不同速度下穴盘苗水平平均位移的分布区域Fig.7 Distribution region of mean horizontal displacement of plug seedling at different velocities
3 投苗准确率试验分析
对不同试验因素配置进行穴盘苗抛投运动投苗准确率的测试,寻求最佳匹配参数,采用Box-Behnken试验设计方法[22-24]进行穴盘苗投苗试验,试验设计方案及测定结果见表3。
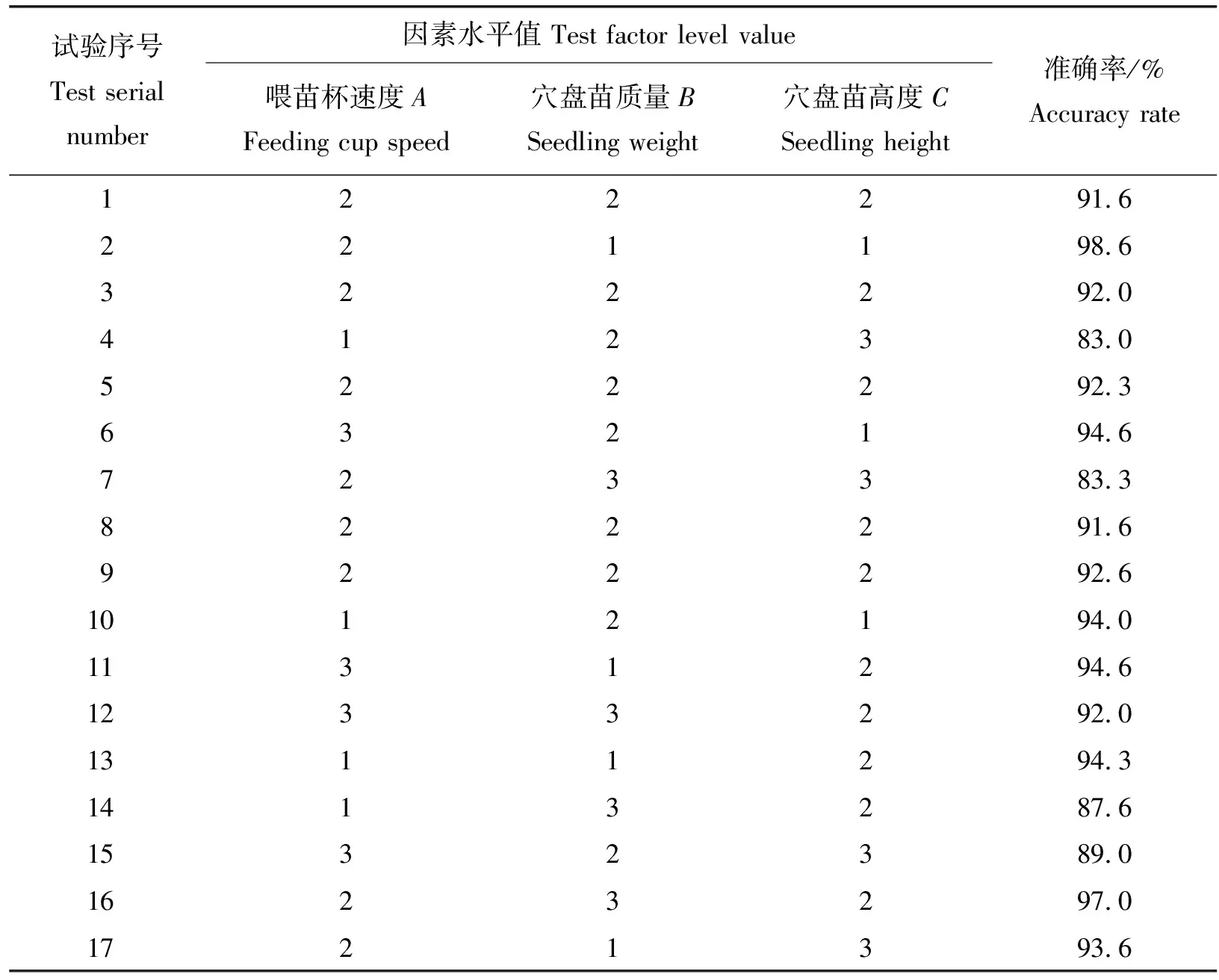
表3 投苗准确率试验方案及结果Table 3 Experimental scheme and results of the accuracy rate of seedlings
3.1 投苗准确率模型建立及回归分析
使用Design-expert 8.0.6软件对试验结果进行多元回归分析,获得编码值表示的投苗准确率回归模型:
Y=92.02-1.412 5A+2.65B+4.412 5C+
1.025AB+1.35AC-2.175BC-
1.435A2+1.54B2-0.435C2
(3)
式中:Y为穴盘苗投苗准确率,%;A、B、C分别为喂苗杯速度、穴盘苗质量、穴盘苗高度的水平编码。对上述二次回归模型进行方差分析和回归系数显著性检验,结果见表4。可知,投苗准确率试验模型的P<0.01,表明该模型极显著,R2=0.990 6,表明该模型精确度较高;失拟项具有不显著性(P=0.1448>0.05),说明模型所拟合的二次回归方程与实际相符合,能正确反映投苗准确率Y与A、B和C之间的关系,回归模型可以较好地对试验中投苗准确率进行预测。模型中的一次项A、B、C均为显著,影响投苗准确率的因素依次为C>B>A,即为穴盘苗高度>穴盘苗重量>喂苗杯速度;交互项AB、BC、AC均显著,BC>AC>AB。
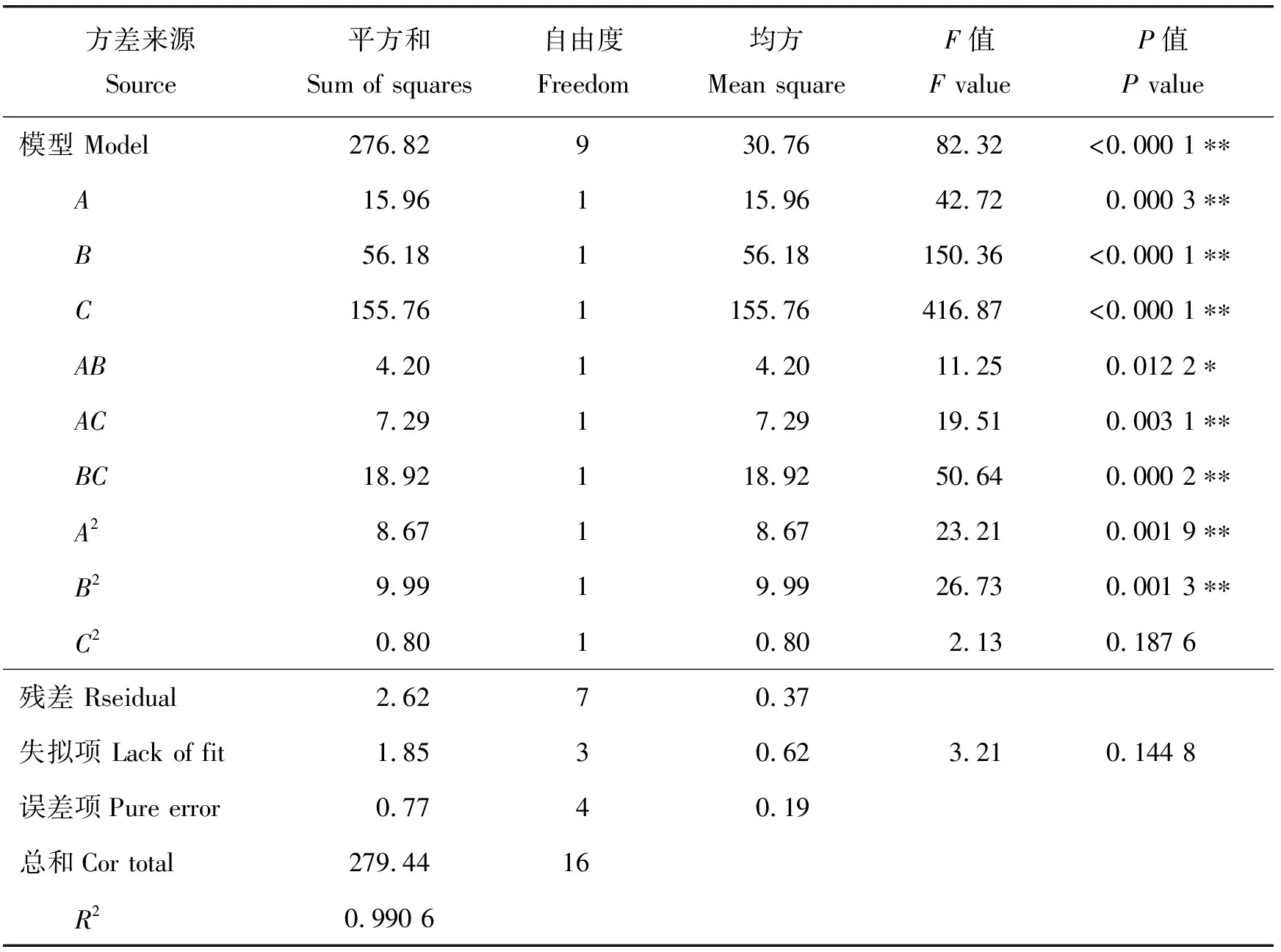
表4 投苗准确率回归方程方差分析Table 4 Analysis of variance for regression model of the accuracy rate of seedlings
3.2 投苗试验参数优化
采用响应面法中主目标函数法对各影响因素进行参数优化,以投苗准确率为响应值,确定各影响因素间的最佳组合并进行试验验证,确定吊杯式移栽机投苗准确率的最优参数为:喂苗杯速度为0.184 m/s(移栽机前进速2.0 km/h),穴盘苗质量为(20±4) g,穴盘苗高度为(130±10) mm,此时投苗准确率达到99%,栽植器接苗点位于栽植器的中心位置,减少了穴盘苗与栽植器的碰撞,降低了苗钵质量的损失率。
4 结 论
本研究基于穴盘苗植株形态分析和农艺要求,用高速摄影机拍摄穴盘苗抛投过程,采用图像后处理技术分析穴盘苗质量、穴盘苗植株高度和喂苗杯速度对穴盘苗抛投运动的影响,并进行3因素3水平的正交试验,建立了穴盘苗投苗准确率的回归模型,获得最佳投苗参数组合。主要结论如下:
1)穴盘苗高度、穴盘苗质量和喂苗杯速度对抛投过程中穴盘苗的姿态和运动轨迹有较大影响。用统计法分析了8种喂苗杯速度(0~0.253 m/s)下的穴盘苗抛投运动,结果表明栽植器接苗时穴盘苗水平位移区域为[30,50] mm,确定喂苗机构落苗口相对于栽植器接苗点水平位移为32.1 mm≤L≤42.8 mm。
2)穴盘苗高度、穴盘苗质量和喂苗杯速度对投苗准确率具有显著性作用,各因素影响程度主次顺序为,穴盘苗高度>穴盘苗重量>喂苗杯速度。并确定了吊杯式移栽机投苗准确率最优的参数:喂苗杯速度为0.184 m/s (移栽机前进速度2.0 km/h),穴盘苗质量为(20±4) g,穴盘苗高度为(130±10) mm,此时投苗准确率达到99%。
本研究主要在室内进行投苗试验,以高速摄影技术为主要试验手段,以定性分析为主,后续将进一步对影响投苗准确率的穴盘苗运动轨迹、姿态变化、接苗角、机械振动等因素进行研究。
猜你喜欢
园艺与种苗(2023年7期)2023-08-11 04:52:24
当代水产(2023年2期)2023-05-19 08:22:28
当代水产(2023年2期)2023-05-19 08:22:18
中国农机化学报(2023年12期)2023-04-29 00:44:03
当代水产(2021年4期)2021-07-20 08:10:46
健康之家(2021年19期)2021-05-23 11:17:39
医学食疗与健康(2021年27期)2021-05-13 18:46:23
农业科技与信息(2021年2期)2021-03-27 07:27:38
当代水产(2020年4期)2020-06-16 03:22:44
山东林业科技(2019年2期)2019-06-03 10:11:08