融合时频域特征的舰船识别方法及实验研究
2021-11-08 08:50夏春艳吕孟婷
声学技术 2021年5期
梁 喆,侯 朋,夏春艳,吕孟婷
(大连测控技术研究所,辽宁 大连 116000)
0 引 言
近年来,随着人工智能的快速发展,将神经网络技术应用于舰船目标的特征识别已成为趋势[1]。如何提取目标的声学特征作为神经网络输入,以及采用哪些特征作为目标识别的依据,是基于神经网络这类人工智能识别方法需要解决的关键问题。
当舰船目标处于高背景噪声环境或较远距离时,接收水听器难以在高频段获得足够的信噪比,而舰船目标的低频段噪声具有衰减慢、传播距离远、不易受其他信号调制等特点[2],成为目标被动识别的主要信息源。由于舰船目标的机械运动特性,其低频线谱特征成为少数可以用于目标识别的特征之一[1]。线谱特征集中了船舶桨轴频率特征以及桨叶频率特征,甚低频中还包含了将船体尺度作为冲激响应系统的信号特征。另一方面,舰船目标作为一个独特的发声体,其时域信号特征也是目标识别中一个重要的参考依据。以往的目标识别大多基于单一特征提取,但由于舰船目标声学信息的特殊性,单一特征并不能完整地对目标进行表述[3-5],选用不同的特征提取方法提取的特征反映了舰船噪声信号不同的特征,一般情况下很难做出某种方法优劣的判断,如果把不同的特征提取方法提取的特征融合起来,将使识别过程中的不确定性样本数减少,从而提高目标识别正确概率,提高整个识别系统的性能[1-2,6]。
特征融合是将多源数据进行多级别、多方面、多层次的处理,从而获得比任何单个输入数据更准确的信息。特征融合方式主要分为三类[5]:数据级融合、特征级融合、决策级融合。相比而言,数据级融合充分应用了目标的原始物理信息,但需要处理的信息量大,实时性差,处理代价高。常用的特征级融合方法利用特征的欧氏距离确定基本概率赋值的方法,虽然简单直观地反映了特征向量之间的近似度,实现了可观的信息压缩,但该方法直接对特征向量进行计算,不但计算量大,而且在证据冲突状态下无法横向对比不同特征提取方法得到特征向量的置信度[6],导致其中一种或几种特征识别率严重下降时仍给出有效投票,增加目标的错误识别率。而决策级融合由于决策向量维数较低且已经将目标进行预识别,因此有很高的的灵活性[7]。
基于上述考虑,本文提出一种融合舰船辐射噪声时频域特征的识别方法,将舰船辐射噪声的线谱特征和线性预测倒谱特征作为输入,分别利用 BP神经网络进行训练、降维及初步判别,并采用加权投票方式,引入置信度算法和拒判机制实现决策级融合识别,上述方法可以使不同的特征向量相互补充,提高舰船目标识别的正确率。
1 特征提取方法
1.1 线谱特征提取
图1给出了典型的线谱特征提取流程。

图1 线谱提取流程图Fig.1 The flowchart of line spectrum extraction
首先,将降噪处理后的信号样本进行中心化处理:

式中:x(i)为信号样本,y(i)为中心化处理得到的信号。通过多个时刻谱值积累可以减少偶然因素的影响,抑制随机干扰弱线谱,提高线谱提取的可靠性。由于线谱叠加在连续谱之上,为了分解出线谱信息,需要通过谱平滑减去连续谱,得到去除连续谱后的线谱图,只保留线谱。
对剔除连续谱后的线谱图进行归一化处理得到y1(i):

对每一点设置标志F(i),对y1(i)求平均值,舍去小于平均值的点:


谱峰值所在点在局部为最大点,不可能出现在中间点上,因此剔除连续上升或连续下降点,只留下转折点[2]:

可得:

剔除极小值:

将剔除的点所在位置的值置为0,得到y4(i):

对剔除连续上升点、连续下降点和极小值点得到的y4(i)进行谱峰值合并处理,即设置频率范围门限Δg,将频率范围Δg内的线谱看作同一根线谱,其频率局部最大值点为

对式(9)中y5(i)剩下的局部最大值点进行门限阈值处理,即得到线谱特征。
1.2 线性预测倒谱特征提取
舰船目标是一个复杂的发声体,即一个声频系统。通过水听器侦听到的噪声信号也可近似看作语音信号,这种语音信号就是目标中的各种噪声源通过这一声频系统产生的响应,即声频系统冲激响应和激励噪声源两者在时域中的卷积,简单来说也就是将船体视为一个响应系统,而内部的各个工作部件就是这个系统的输入激励信号,由于船体本身是不变的,那么分离出来的响应函数也就能代表舰船的目标特性[8]。
线性预测系数(Linear Prediction Coefficients,LPC)是用过去p个时刻的声信号采样值的线性组合以最小的预测误差对下一时刻的信号进行预测[9],该预测值定义为对噪声信号x(n)的p阶线性预测,预测值表示为:

式中,系数ai(i=0,1,2,…,p)称为噪声信号的线性预测系数,即LPC。
信号x(n)的倒谱cn反映了信号的时域特征,定义[10]为

式中,X(z)为信号x(n)的Z变换。
水听器接收到的声信号可以表示为

式中:f(n)为目标中的激励噪声源;h(n)为目标作为一个响应系统时的冲激响应;hc(n)为声信道的冲激响应;N(n)为加性噪声,一般情况下可将加性噪声视为高斯白噪声。将信号中的加性噪声进行高斯平滑预处理,以尽量减小对目标噪声信号的影响,将模型简化为

为了分离目标声频特性冲激响应h(n),对信号进行倒谱计算,设式(3)中x(n)、f(n)、h(n)、hc(n)的倒谱分别为cn、fn、hn、hcn,则:

由于相同情况下,不同目标舰船的声信道冲激响应hcn基本不变,可将hcn作为系统误差进行忽略,所以式(14)简化得到信号x(n)的倒谱cn:

若噪声使用全极点模型,舰船目标系统函数可表示为[10]


由上式可知h(n)的倒谱hn随n的增加而衰减,因此,hn集中在目标噪声信号倒谱的低时段。线性预测倒谱是基于时域划分的以时间片段为轴系的特征,低时段指坐标轴中时间序列较低部分,高时段指坐标轴中时间序列较高部分。
激励噪声源f(n)可以表示为周期性的冲激信号[10]:

对f(n)求倒谱得到fn[9]:

可以看出激励噪声源的倒谱是周期性的冲激函数,周期Np保持不变,因Np相对于n较大,所以fn处于高时段。
由于hn和fn所处的倒谱时段不同,通过提取噪声信号倒谱的低时段和高时段.可以将它们较好地分离。因此用噪声信号倒谱的低时段分量就可以很好地表示目标作为发声体的冲激响应[9]。从而将信号中的激励噪声源fn剔除,保留响应函数特征,即仅保留hn。
将LPC系数代入式(15)推导得出舰船目标辐射噪声信号的LPC倒谱cn[9]:

式(20)中的an即为由式(10)计算得到的LPC系数。典型的LPC倒谱特征提取结果如图2所示。
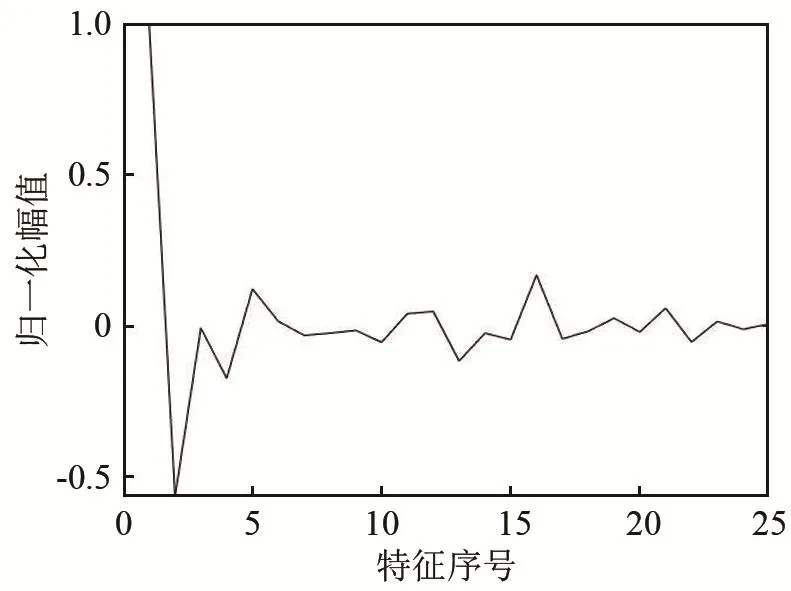
图2 典型的LPC倒谱特征Fig.2 Typical cepstrum features of LPC
2 目标特征融合识别
2.1 特征融合识别方法
考虑到对目标的特征融合算法本身增大了识别算法整体的运算量和复杂度,本文采用将BP神经网络的输出向量作为决策级融合的输入数据。一方面因为 BP神经网络具有优异的非线性映射能力,并且它的简单高效使其在模式识别领域被广泛应用,另一方面由于特征融合导致的特征维数增加,而经过BP神经网络的判别后,特征维数被有效降至低维矢量,再经过融合算法构成完整的识别系统,既有效降低了数据运算量,提高了系统效率,避免了维数过高可能带来的精度降低问题。决策级融合方式如图3所示。

图3 决策级特征融合识别方式示意图Fig.3 Schematic diagram of decision-level feature fusion
2.2 决策级融合的加权投票法
在决策级融合方法中,常见的有投票法、贝叶斯(Bayes)推理法、D-S证据论证法[11-13]。其中,投票法最为简单直观,且应用广泛。因此,本文采用加权投票决策级融合方式。
设给定的模式空间D中的向量分属于M个互斥的集合C1、C2…CM,识别系统由J个特征提取连接独立的分类器组合形成,若分类器ej对于来自Ci的样本有期望输出Ei,j,而在分类器ej进行识别时产生的输出向量为yj,由于期望输出向量Ei,j与实际输出向量yj基本不相同,并且类别相差越大的目标,向量Ei,j与yj差值越大。所以当期望输出向量Ei,j与实际输出向量yj差值较大时,赋予识别集合Ci较小权值,当Ei,j与yj差值较小时,赋予识别集合Ci较大权值。
权值计算流程如图4所示,权值公式定义为

图4 权值计算流程图Fig.4 Flow chart of weight calculation

相对距离定义为



图5 支持度计算流程图Fig.5 Flow chart of support calculation


则积分上限Oj为各分类器产生输出向量中相对距离最小值的负数:

基于多个分类器输出向量加权投票法的判决规则E(D)为[14]

式中:Tk为决策阈值根据系统需求设定;k为某个已设定类别;P(D∈Ci)为式(23)计算得到输入数据属于Ci类别的票数。该系统引入拒判机制,当票数P低于决策阈值Tk时,判决输入数据不属于数据库内的已知目标,防止识别系统将数据库外的目标进行误判。
3 实验验证
3.1 实验概述
为验证本文提出的舰船目标识别方法的有效性,在某海域进行了实船验证实验。实验涉及三类实船目标,主要参数如表1所示。实验海域为泥沙质斜坡式海底,水深30~50 m,海况3~4级。参照实船噪声测试规范,实验过程中,被测舰船由出发点加速至目标航速,以既定正横距离通过测量系统后驶出测量区域。选取每段噪声数据末尾处即目标舰船离开测量区域后的测试数据作为背景噪声,以目标舰船处于正横处的测试数据作为信号计算信噪比。

表1 三类目标船型数据Table 1 The data of three types of target ship
针对三类舰船辐射噪声数据进行分析,其中:
(1)交通艇测试数据206个,航速均为 6 kn(1 kn=1.852 km·h-1),测试正横距离 300 m,水深30 m,信噪比约为11.1 dB,验证大数据量情况下系统的识别效果;
(2)拖轮测试数据284个,航速4 kn,正横距离300 m,水深30 m,信噪比约为10.8 dB的数据142个;航速7 kn,正横距离1 500 m,水深50 m,信噪比约为3 dB的数据142个,主要验证目标相对距离对系统识别稳定性的影响;
(3)某型实验船测试数据198个,航速6 kn,正横距离300 m,水深30 m,信噪比约为9.4 dB的数据70个;航速9 kn,拖桨滑行,正横距离300 m,水深30 m,信噪比约为4.3 dB的数据71个;航速13 kn,正横距离 300 m,水深 30 m,信噪比约为26.1 dB的数据57个,验证不同工况及小数据量情况下识别系统的稳定性。
3.2 数据处理流程
(1)将测量得到的A、B、C三类不同类型的船只辐射噪声分为训练组和测试组两组数据,挑选具有典型特征代表的数据作为训练组,训练组样本个数分别为:A类56个、B类84个、C类61个。测试组样本个数分别为:A类150个、B类200个、C类137个。
(2)将训练组噪声数据进行线谱特征提取和LPC倒谱特征提取,保存得到特征向量。
(3)分别用线谱特征向量和LPC倒谱特征向量训练独立的BP神经网络并存储。
(4)提取测试组数据的线谱特征,输入由训练组的线谱特征训练好的BP神经网络,得到单独使用线谱特征识别目标的识别率。
(5)提取测试组数据的LPC倒谱特征,输入由训练组的LPC倒谱特征训练好的BP神经网络,得到单独使用LPC倒谱特征识别目标的识别率。
(6)将测试组数据的线谱特征和LPC倒谱特征同时输入对应的BP神经网络分类器,得到两个分类器的输出向量后,输入至决策器进行判决,最终得出联合特征识别的识别率。
3.3 BP神经网络及决策器设计
BP神经网络设计为3层,其中输入层神经节点数为各自特征的维数,输出层神经节点数为3,三类目标的期望输出值分别为[1 0 0]、[0 1 0]、[0 0 1]。隐含层的神经节点数按照经验公式设计[15]:

其中:m为输入层神经节点数,n为输出层神经节点数。
经过多次实验得出的最优结果,设决策阈值Tk=0.45,此时的判决准则为:输出向量得票数最高且超过决策阈值Tk的决策结果。
3.4 实验结果及分析
表2~4分别给出了不同工况下分别基于线谱特征、LPC倒谱特征及融合时频域特征的三型船只识别结果。

表2 基于A类目标识别结果Table 2 Recognition result of Class A targets
如图6所示,对A类目标特征的线谱提取时发现,由于某单程受到不明来源的低频噪声干扰,导致测试组中的几个特征数据出现了较强干扰谱线,分类器对这几个特征数据误判。但由于总体信噪比条件良好,以LPC倒谱作为对目标时域特征的描述未受无节奏周期声干扰的影响,仍表现出对A类目标较高的识别率。而应用融合特征识别时将错误判例及时纠正,提高了对A类目标的识别率(表2)。


图6 A类目标6 kn航速的线谱特征对比Fig.6 Comparison of line spectrum feature of Class A targets at 6 kn speed
由于B类目标的线谱特征较为明显,且作为训练组的数据具有代表性,对B类目标的线谱识别即使在远距离也具有极高的识别率,而LPC倒谱特征作为时域上的节奏性特征,远距离识别率出现下降,但两种特征依然互为补充,从而达到准确识别目标的效果(表3)。

表3 对于B类目标识别结果Table 3 Target recognition result of Class B targets
针对C类目标13 kn航速状态下的识别,由于训练组供分类器训练的数据样本较少,且工况中存在目标在加速状态后切换到匀速航行状态并转舵的情况,使声节奏叠加并受到干扰结果如图7所示。LPC倒谱的识别率严重降低,决策器通过置信度算法显示分类器偏移期望向量过大,自动给予线谱特征识别方式较高的支持度,而线谱在谱值积累的作用下抑制了短时出现的转舵声,仍有较好的识别率,使总识别率不受LPC倒谱特征的影响,即联合特征的识别率仍与线谱特征识别率持平(表4)。

表4 对于C类目标识别结果Table 4 Target recognition result of Class C targets

图7 C类目标13 kn航速的LPC倒谱特征对比Fig.7 Comparison of LPC cepstrum feature of class C targets at 13 kn speed
4 结 论
本文提出了一种融合时频域特征,并在常用的加权投票法后加入置信度算法的识别方法,对三类不同类型的舰船在多种工况下进行识别,分析了不同识别方法的特点,通过实验验证了本方法的可行性。
研究发现,对于舰船目标声学特征的描述,频域方面的线谱特征识别率较为稳定,时域方面的LPC倒谱特征识别率波动较大,推测其使用的声节奏特征易受到复杂工况和环境叠加干扰的影响,后续研究将加强对该方面进行验证。尽管如此,由于频域和时域对目标声学特征的描述方式不同,呈现出互补的效果,所以融合多种特征的目标识别方式可以互相修正某些错误判别,具有较强的鲁棒性,可提升对目标的识别率。加权投票法后加入置信度算法的方式,避免了常用投票法中出现被低识别率识别方法拉低总识别率的问题,提高了识别系统的稳定性和可信度。
本文将线谱特征作为融合特征之一,但近代舰船大量使用大侧斜螺旋桨,大幅降低了叶频和谐波噪声。为了在低信噪比状况下提取目标低频线谱特征,研究人员提出了DEMON谱分析、循环平稳谱分析、Hilbert-Huang变换、小波分析等系列方法。后续研究可考虑将上述方法融入到本文提出的多特征联合识别系统,进一步提升目标识别的准确率和鲁棒性。
致谢感谢大连测控技术研究所科研一室参加海试的科研人员,他们对实验数据获取做了大量的工作。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年10期)2022-06-17
舰船科学技术(2021年12期)2021-03-29
兵工学报(2020年9期)2020-11-24
中国听力语言康复科学杂志(2019年3期)2019-06-24
听力学及言语疾病杂志(2019年3期)2019-05-24
中国交通信息化(2018年3期)2018-06-13
中国高新技术企业(2017年5期)2017-05-05
舰船科学技术(2016年1期)2016-02-27
舰船科学技术(2015年8期)2015-02-27