
事件触发异步融合算法及在光电传感网的应用
2021-11-08 02:55:30盛安冬
兵器装备工程学报 2021年10期
陈 烨,盛安冬
(1.南京工程学院 人工智能产业技术研究院,南京 211167;2.南京理工大学 自动化学院,南京 210094)
1 引言
近年来,多传感器网络由于其小型化、轻量化、成本低等优势被广泛应用于环境监测、战场探察、目标定位、危险区域搜救等领域,得到了国内外研究人员的广泛关注[1-4]。
异步状态估计问题作为信息融合领域内的一个重要分支,近年来受到了国内外研究人员的广泛关注。Zhu等[5]提出了一种无线传感网络中的序贯异步滤波算法,利用预测估计值解决了异步量测无法直接融合的问题。Ondrej Hlinka等[6]将贝叶斯滤波器中的预测更新过程与一种融合规则相结合,提出了一种异步无线传感网络中的分布式序贯估计算法。Yang等[7]通过引入时变缩小因子的方法建立一种不敏Kalman滤波及不敏强跟踪滤波混合滤波算法,解决了一类带时延的异步传感器网络中的目标跟踪问题。
目前异步传感器网络状态估计问题中,各传感器需将各自量测值全部发送至融合中心或邻居节点[5-7],加重传感器网络通信系统的负担,增加能量损耗,限制异步多传感器信息融合方法在某些实际系统中的应用。
为此,本文将事件触发机制[8-13]引入异步传感器网络状态估计框架,在保证估计精度的前提下,减少各传感器与融合中心间的通信量,降低能耗。
2 问题描述
考虑连续时间动态系统如下:
(1)
式(1)中:x(t)表示x在时刻t的状态,初值为x(0);w(t)为零均值高斯白噪声,方差为q(t)。对式进行离散化,可得:
x(tk)=Φ(tk,tk-1)x(tk-1)+w(tk,tk-1)
(2)

(3)
按现有异步融合框架,各传感器需将所有量测值均发送至融合中心,导致系统通信负担过重,能耗过大。为此,本文建立事件触发机制如下,控制各传感器与融合中心间的信息交互过程,减少通信量,降低能耗。
(4)
引入事件触发机制后,系统如图1所示。
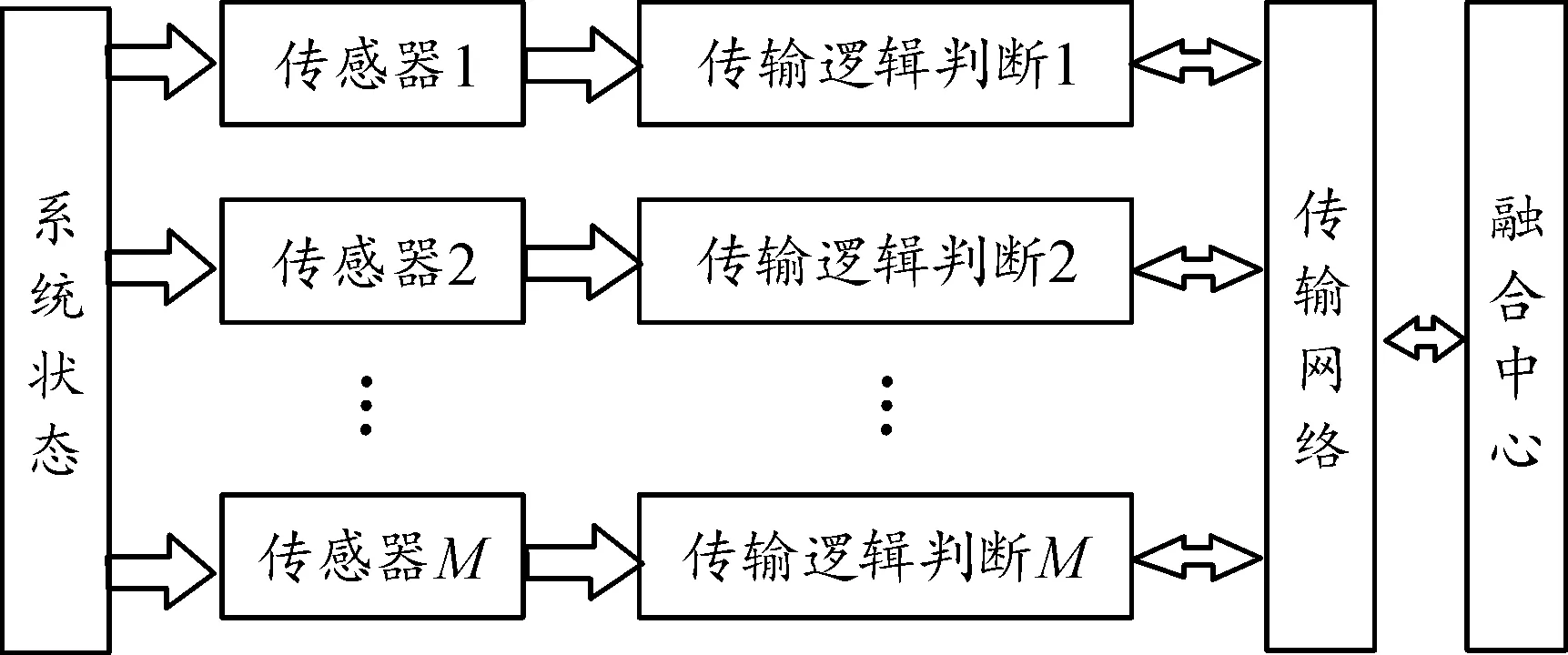
图1 事件触发异步状态估计系统框图
系统引入事件触发机制后,各传感器根据每时刻量测值对融合中心估计性能影响的大小,来判断是否需将此时刻量测值发送至融合中心,可解决目标运动参数估计精度与系统资源消耗间的平衡问题,适用于集中式及分布式多传感器信息融合架构。下文推导事件触发机制(式)下的信息融合算法。
3 事件触发异步融合算法
由事件触发机制(4)可知,当触发条件不满足时,相应传感器不发送此时量测值至融合中心,有如下引理1。


(5)


(6)
式(6)中,ny为量测向量的维数。
3.1 量测更新
在事件触发机制下:




(7)
式(7)中,

Zk=Hkx(tk)+ηk
其中


其中,1i=q表示当i=q时,取值为1,反之为0。
ηk的方差为:
由于
(8)
ηk与过程噪声w(tk,tk-1)的协方差为:
因此,在事件触发机制下异步信息融合算法中,过程噪声与量测噪声相关,利用修正的Kalman滤波算法[14]可得:

3.2 时间更新


相应的预测估计误差协方差阵为:
Φ(tk+1,tk)Pk|kΦT(tk+1,tk)+Q(tk+1,tk)
综上,事件触发异步状态估计算法如下。

步骤1:量测更新
步骤2:时间更新

Pk+1|k=Φ(tk+1,tk)Pk|kΦT(tk+1,tk)+Q(tk+1,tk)
在所提事件触发机制及相应估计算法中,需按照一定条件设置触发机制相关参数,保证融合中心估计误差的有界性。


(9)
其中

(10)
(11)
由均方意义下的期望特性可得:
2E{‖vk‖2}
(12)
由估计误差协方差的物理意义可知:
(13)
(14)

(15)
(16)
进一步可得:
(17)
由参考文献[15]可得,∃0≤a<1,b≥0使得:

(18)
结合式(17)、式(18)可得:
(19)
综合式(14)、式(19),可得:
(20)
证毕。
因此由定理1可得,为保证估计误差有界性,可令触发条件(4)中的参数为:
4 光电传感网中的应用仿真
光电传感网主要通过激光、红外、可见光谱段的光电传感器实现目标信息的获取,并以有线或无线通信的方式实现各传感器与融合中心间的信息交互,在近距离防空中负责探测目标运动信息等任务。
为验证本文所提事件触发机制及异步估计融合算法的有效性,将本文所提方法应用于某异步光电传感网,从0时刻开始对运动目标状态进行量测。
目标运动方程为:
xk+1=Φkxk+wk
(21)
传感器1~10号量测方程为:
(22)
为说明本文所提事件触发机制的有效性,将本文所提出的事件触发机制下异步融合算法与文献[5]中所提算法进行比较分析。目标位置及速度估计精度如图2所示,传感器与融合中心间通信量如图3所示。
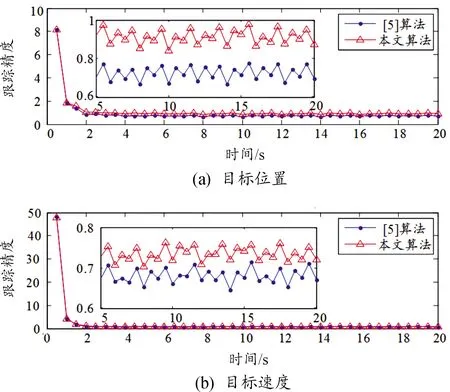
图2 目标位置及速度估计精度

图3 传感器与融合中心间通信量
由图2、图3可得:引入事件触发机制后,探测器与融合中心间的通信量仅为原来的1/4左右,通信量大幅降低,节省了系统通信资源和能源消耗。融合中心对目标位置及速度的估计精度略有降低,但在一定范围之内。
系统引入事件触发机制后,传感器不需要将每次的量测值均发送至融合中心。门限阈值越大,各传感器发送量测值的时间间隔越大,相应地,估计精度会有一定程度的下降,但由定理1可保证估计误差的有界性,不会发散。当门限阈值越小时,估计精度越高,相应地,系统的通信量和计算量也会增加。在实际应用过程中,可以根据系统的各项指标要求及各传感器的量测精度,动态调整各传感器的门限阈值,在保证估计精度等各项指标满足要求的前提下,尽可能地降低通信及计算量,减轻系统通信及运算负担。
5 结论
本文针对异步传感网络中传感器与融合中心间通信量过大的问题,提出了一种事件触发机制,减少了各传感器与融合中心间不必要的数据通信,推导了相应的异步融合算法,给出了保证算法估计误差有界性的条件。仿真及理论分析结果表明:本文所提方法可在保证估计精度的同时,降低异步网络中传感器与融合中心间的通信量,降低能耗。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
电子制作(2018年23期)2018-12-26 01:01:26
文苑(2018年21期)2018-11-09 01:23:06
电子制作(2018年11期)2018-08-04 03:25:38
测绘科学与工程(2016年5期)2016-04-17 06:51:15
中国卫生(2015年9期)2015-11-10 03:11:12
电子设计工程(2015年3期)2015-02-27 12:03:45
中国卫生(2014年3期)2014-11-12 13:18:12
中国火炬(2014年4期)2014-07-24 14:22:19
