
可折叠旋翼飞行器设计与试验研究
2021-11-08 02:16:24王守太郝永平邱勇军有德义羊进
无人机 2021年7期
王守太,郝永平,邱勇军,有德义,羊进
1.沈阳理工大学
2.湖南洪源远大科技有限公司
针对旋翼飞行器续航时间短,结构外形不便于随身携带等问题,通过分析旋翼飞行器结构特点和飞行原理对其进行了优化设计,提出一种基于单兵榴弹的四旋翼飞行器,将机翼折叠之后与榴弹结合呈圆筒状放入发射器,通过筒壁对折叠机构限位,在冲击载荷的推动下迅速到达特定区域进行指定的工作。本文给出了结构设计及飞行控制方案,进行了三维仿真建模和强度校核,最后做了实物模型制作和实验测试。实验表明,该飞行器实现可折叠功能,能够稳定悬停定高飞行,避免了浪费过多动力,大大延长了有效工作时间,同时节省携带空间,达到了良好的效果。
微型旋翼飞行器在发射之后,能够实现自主飞行或者遥控飞行,具有带负载能力强、体积小、飞行稳定、控制特性简单、执行任务时隐蔽性强的特点,它能够帮助士兵在战场上侦察近距离、复杂地形环境下的军情。除此之外,还可以用作特殊情况下部队之间的通信联系工具,甚至还能装上弹药直接用作攻击性武器,实行单兵作战进行目标识别和打击。为了能够增加续航时间,易于随身携带需要做结构优化设计。
飞行原理
对旋翼飞行器的控制问题进行研究,可通过建立旋翼飞行器的系统模型进行。飞行器的飞行原理如图1所示,具有4个旋翼,其中两个相对的旋翼顺时针旋转,另外两个逆时针旋转,以抵消飞行器的扭矩。电机带动桨叶产生向上的升力,向上的升力大于自身的重力时,飞机可以向上运动。
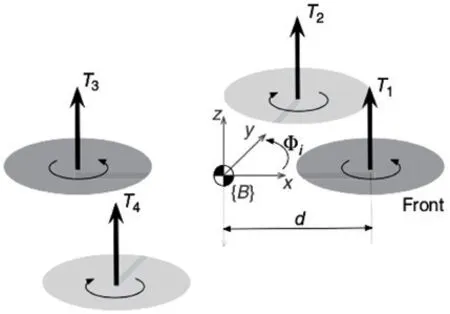
图1 飞行原理图。
表1是旋翼飞行器的4个电机相应转速与旋翼飞行器俯仰、横滚和偏航等运动形式之间的对应关系。由表可知,想要控制飞行器的运行状态,必须合理的控制4个电机的转速。
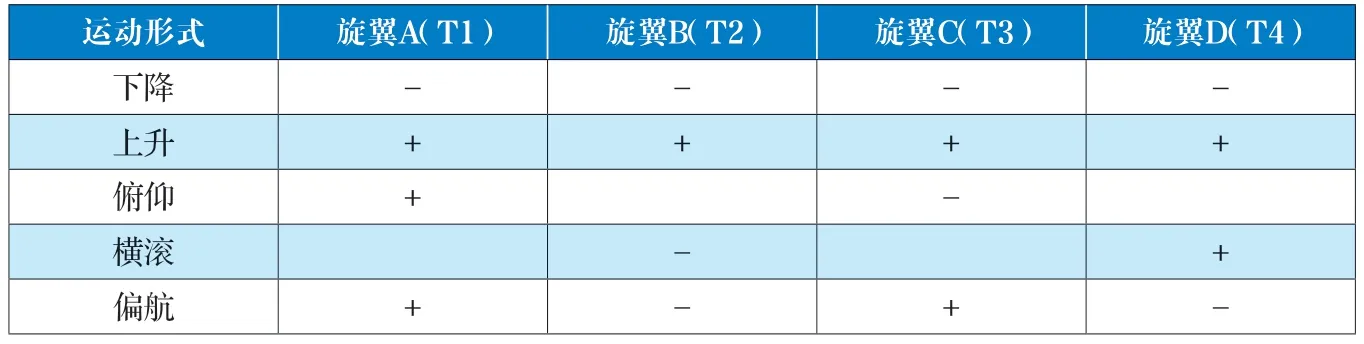
表1 电机转速与旋翼飞行器运动形式。
飞行器平台的硬件系统设计
在机身方面采用碳纤维材料,这是由于碳纤维材料强度高、质量轻,可以最大限度的减小机身自重,而且满足特殊形状的加工要求,使无人机具有较高的强度及稳定性。
折叠结构设计
机翼的结构设计要求:
(1)满足关键零件的精度要求,获得精确的转动中心位置;满足关键零件的刚度要求,防止打印件塑性变形。
(2)质量轻。微型旋翼飞行器的重量是限制电池尺寸的重要因素,从而影响动力续航能力,所以应尽可能设法减掉多余的材料和质量,从而得到更轻、更高效的飞行动力系统。
(3)结构简单,装配容易。不同于普通四轴飞行器的固定机臂,微型折叠飞行器通过在机臂处增加扭簧折叠装置以达到旋转机臂的目的。通过扭簧折叠机构控制机臂角度,来达到减小尺寸,达到飞行模式的转换并促进飞行效率的提升,折叠机构如图2所示。
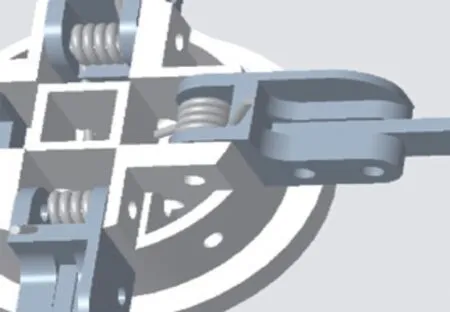
图2 折叠结构设计。
关键结构强度校核
对机臂水平和竖直方向进行力学分析,弯矩图如图3所示。
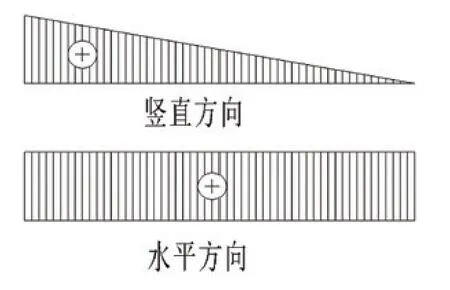
图3 机臂弯矩图。
由弯矩图可知:
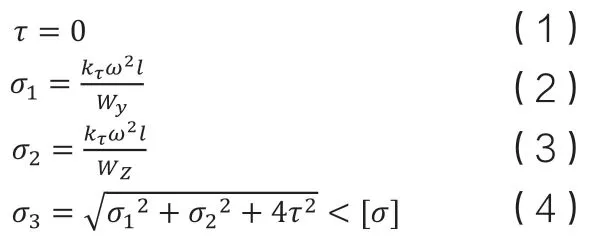
已知6061碳纤维的许用应力[σ]=1000MPa,计算得出σ3=10.45MPa<1000MPa,可以得出强度符合要求。
锁紧装置设计
由于微型四旋翼的尺寸限制,分别在旋转机翼夹和内衬卡槽相互配合的表面上,取相应的机翼展开时的工作位置设计球冠形凸点和凹坑。当转动机翼臂时,凸起部强力顶开机架内壁,利用塑料机架零件的内壁变形所产生的弹性恢复力实现自锁功能。
扭簧设计
扭簧依靠扭转变形给折叠机构提供相应的势能。扭簧的设计要满足展开力的要求,并且要保证折叠角度,飞行器机翼的折叠角度定为90°。
在材料的选择方面,根据工程经验,扭簧的材料选用高强度钢。弹性模量E=184GPa,泊松比μ =0.31,σb=2000 MPa。对于规格和尺寸,则根据折叠翼卡槽的外形尺寸,以及需要满足的扭矩确定扭簧的规格。
电源模块设计
飞行器的主要动能来源是锂电池,高聚合物锂电池能够高效的满足电路的需要。本次设计电源模块电压为11.2V,电子调速器可以直接从3S锂电池获得电源供应,足以提供驱动电机的电压和电流。而微控制器和其他传感器,既可以单独供电也可以通过电子调速器降压模块获取5V电压,来实现飞控系统的稳定运行,电源冗余设计能够保证动力持续提供,电压稳定满足飞控的需求。
电机驱动设计
选用4500kV无刷电机1303.5配3020螺旋桨,其外转子转动,而内部线圈固定,在扭力和转速等上具有优越的性能,每个电机都需要电调驱动,选用四合一穿越机电调,单个电机最大拉力为180g,总机最大升力为 720g,为了使飞机能有足够动力进行姿态调整,通常留有 40%的冗余,所以飞行器满足升力需求。由图4可见,电机模块驱动正常,电机桨叶选型合适。
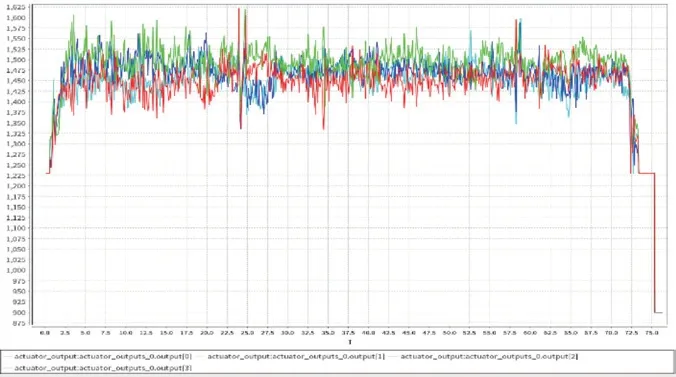
图4 电机实际与期望的pwm 输出。
飞行器平台的软件系统设计
飞行器平台软件设计的总体目的是协调各模块的正常工作,使旋翼自主飞行器能够按照既定的方案稳定飞行。经过卡尔曼滤波和融合,使在加速度测量的角度估算当前旋翼飞行器的姿态更加精确。利用经典多级PID控制算法,期望姿态变化转化为控制器输出PWM波占空比的变化来控制电机转速。通过控制电机的加速或减速,保持飞机的平衡和各种姿态变换和运动形式。
飞行控制系统采用STM32F745 处理器作为整个系统的控制核心,首先将有加速度计、陀螺仪和磁力计检测当前无人机的姿态信号并传输给处理器,然后处理器进行信号处理来估计飞行器当前姿态和位置,进而采用一定的控制算法对飞行器进行控制。数字式的输出量直接转换成输出由处理器处理。接收模块能够实现遥控器和飞行的实时通信,保证飞行器的飞行路径和飞行高度。
仿真与测试
针对飞行器软硬件系统设计合理性,进行了系统仿真、调试与分析。
仿真模型建立
首先,对在三维建模软件中建立的装配模型进行相应和必要的简化,将不存在相对运动的一组零件简化成单个零件,生成装配模型后导入 Adams View中添加约束关系、力和力矩、输入及输出变量,最终输出动力学模型文件。可以得到机臂质心展开时,在z轴角速度变化的曲线,如图5所示。分析z轴角速度变化的曲线,可知机臂展开正常,机构合理,符合设计要求。
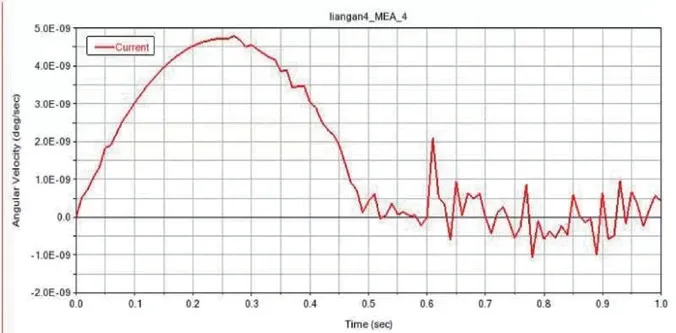
图5 z 轴角速度的变化曲线图。
地面飞行测试台的搭建

图6 飞行测试现场图。
为了防止因大量参数调整对飞行器进行的损坏,搭建飞行测试台,通过测试台实现横滚、俯仰、偏航的单独运动或者组合运动,进行PID的调参,最终确定了控制器中参数的最优组合,如表2所示。

表2 PID 控制参数表。
实际飞行测试中的横滚俯仰变化可见图7。分析飞行日志得知,虽然在姿态控制上存在一些震荡,但是随着时间的变化,震荡都是在一定范围内并且有收敛的趋势,使姿态控制比较平稳,横滚、俯仰及加速度的实际输出值接近期望输出值,达到了控制无人机姿态的目的。最后在控制程序完成后,基本实现平稳飞行。

图7 实际与期望横滚和俯仰姿态变化曲线。
总结
本文设计了一款微型折叠旋翼飞行器,对折叠机构、飞控系统、动力系统的原理和结构方案进行了阐述与设计,分析了实际过程中可能遇到的问题并提出了相应的解决方法,对各个模块进行调试及调整使得旋翼飞行器能够正常工作,最后将各个模块整合与协调使飞行器基本达到了良好的悬停状态,对无人机技术的发展与国产化有很好的借鉴价值。
猜你喜欢
空间电子技术(2022年3期)2022-08-09 03:12:10
机械制造与自动化(2022年3期)2022-06-24 13:36:58
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
北京航空航天大学学报(2021年9期)2021-11-02 08:24:16
军民两用技术与产品(2021年9期)2021-03-09 05:45:28
电子制作(2019年9期)2019-05-30 09:41:48
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2016年8期)2016-11-16 01:51:09
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
机械工程师(2015年10期)2015-02-02 01:14:00
