一种地面微型燃机用起发控制器设计
2021-11-07 09:49:10曾庆军尚德堉郑自伟
现代机械 2021年5期
曾庆军,尚德堉,郑 浩,郑自伟
(贵州航天林泉电机有限公司,贵州 贵阳 550081)
0 引言
微型燃机也称微型燃气涡轮机,是一种由燃气轮机、起动/发电机和数字控制器等部分组成的发电动力装置,可分为单轴结构和双轴结构两种形式,目前先进的微型燃气轮机主要采用单轴直驱的结构形式。它具有可遥控、效率高、体积小、重量轻、启动快等一系列优点[1],在民用领域、工业领域、军事应用领域等均有很好的市场应用前景。本文所论述的地面微型燃机属于某防化武器系统用的微型单轴涡轮喷气发动机的装置,主要为系统的发烟主机、燃油控制器、起动控制器、滑油控制器、雾油控制器、引气控制器、点火控制器、发电控制器、蓄电池等进行供电。
起动/发电系统是燃气轮机系统的重要组成部分,其主要功能是对燃气轮机的状态监测、起动控制、转速控制、故障监测与处理、停机控制等,起动/发电系统不仅要有逻辑控制,还应该有复杂的过程控制、各种严格的保护控制以及输入/输出信号处理等等。起动/发电系统相对整个系统来说,价格相对较高的功能部件,运行过程中若出现意外事故,则会造成整个用电系统的事故,严重时,会造成重大损失。因此,提高燃气轮机系统性能的关键之一是提高起动/发电系统的性能指标,起动/发电控制器系统在安全性、可靠性方面要求较高,在某种程度上,决定了微型燃机运行的经济性、安全性、可用率以及不同工况下的性能等指标。由于无刷直流电机既具备交流电机的结构简单、功率密度大、运行可靠、维护方便和效率高等优点[2],又具备了直流电机调速性能好、起动转矩大等优点,在微型燃气轮机能量转换装置中首选为起动/发电机。
本文所研究的是某地面微型燃机国产化替代项目中所用的1.5 kW起/发电机控制系统,利用电机的可逆原理,实现起动/发电机双功能,借助于数字信号处理器(dsPIC30F4012)的数据处理功能,基于无刷直流电机的控制原理,大功率电力电子技术的研究,从而使起动/发电控制器满足系统的性能指标。
1 控制策略
起动过程,无刷直流电机的驱动技术主要有带位置传感器的控制策略和无位置传感器的起动控制策略两种方式,结合系统对起动/发电的可靠性要求,本系统选择带位置传感器的三相六状态无刷直流电动机控制策略。带位置传感器的无刷直流电动机是由电机本体(定子侧为电枢绕组,转子侧为永磁体及轴)、位置传感器和电子换相电路等三大部分组成,如图1所示。
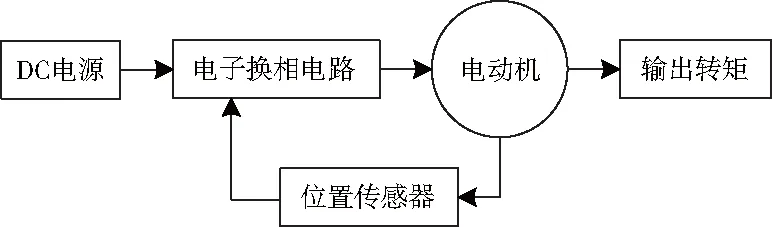
图1 无刷直流电动机工作原理方框图
当电动机处于电动状态时,其工作原理是借助反映转子位置的位置传感器的输出信号,通过电子换向线路去驱动与电枢绕组连接的相应的功率开关器件(注:电子换向线路与功率开关器件等组成控制器),使电枢绕组依次通电,从而在定子上产生跳跃式的旋转磁场,驱动永磁转子旋转,随着转子的转动,位置传感器不断地送出信号,以改变电枢绕组的通电状态,使得在某一磁极下导体中的电流方向始终保持不变。
发电过程,起/发电机完成起动功能后,微型燃机可以通过燃料作为能源实现做功且在传动轴的驱动下拖动起/发电机的转子转动,同时在定子三相绕组产生感应电势,经整流和DC/DC变换后,最终为用电设备供电,电机工作原理如图2所示。

图2 发电机状态工作原理
本文所述的控制器主要由起动控制模块和发电控制模块两大功能单元组成,起动控制单元完成起发电机的起动功能,主要由三相桥式电路、辅助电源转换电路、霍尔信号处理电路、主控DSP电路、驱动电路等组成;发电控制单元将起发电机输出的三相交流电转化为稳定的直流电,主要由三相桥式电路、输入滤波电路、DC/DC变换电路、输出滤波电路、辅助电源电路、PWM控制电路、驱动电路、检测电路等组成。起动控制单元与发电控制单元共用三相桥式电路,起动时作DC/AC运行,发电时作AC/DC运行,产品功能框图见图3。
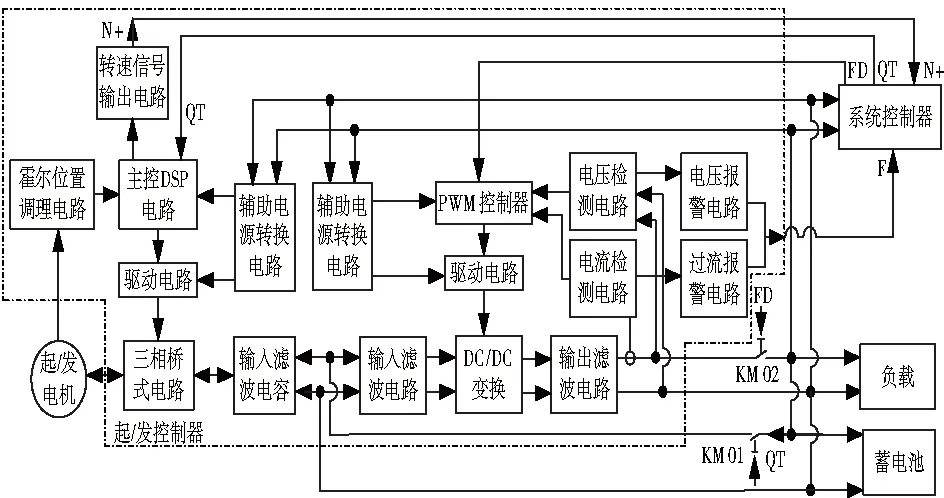
图3 产品功能框图
1.1 工作过程
a)起动过程,起发控制器由外部电池供电,起动控制单元接收到系统“QT”指令为使能(高电平有效),经过电平转换将信号传送给DSP,开启六路PWM驱动,控制三相桥式电路逆变工作,将直流24 V转换成三相交流带转起发电机,将其转速带到点火转速,或者冷拖到8500 r/min以上,起动过程不超过14 s;
b)点火成功后,到达脱开转速,系统“QT”指令为失能(低电平有效),起发控制器主控DSP关闭六路PWM驱动,起动控制停止,三相桥式电路失去控制,呈自然整流状态;
c)脱开起动控制起发电机到达一定转速后,发电控制单元接收到系统“FD”指令,经过电平转换将信号送至PWM控制器,开启PWM驱动DC/DC开关管,经过BUCK电路斩波后稳定输出27.5 V±0.5 V直流电;
d)起发控制器在整个工作过程中给系统提供起发电机转速信号,在发电运行时提供故障报警信号。
通过对无刷直流电动机的起动过程、发电过程的控制,并进行合理的切换,则可构成起动/发电控制器,使其满足地面微型燃机系统的高性能使用要求。
1.2 数学模型
永磁无刷直流电动机的转子上安装永磁体,定子上嵌入电枢绕组,其极数与转子极数相同,定子绕组通过电子换向器(无刷直流电动机控制器)与外部电源连接。
为了简化分析,需对无刷直流电动机做如下假设[3]:
a)电枢绕组完全对称,定子电流、转子磁场分布均对称;
b)忽略电枢反应的影响;
c)电枢绕组在定子内表面均连续分布;
d)磁路不饱和,不计涡流损耗和磁滞损耗。
就本项目使用三相六状态运行永磁无刷直流电动机为对象进行建模,其定子三相绕组的电压方程为:
(1)
式中,R为电枢绕组电阻,Ω;La、Lb、Lc分别为三相绕组自感,H;Mab为A相和B相之间的互感,H;其他依次类推;且有Mab=Mba,Mac=Mca,Mbc=Mcb。
电磁功率可表示为:
Pem=eaia+ebib+ecic
(2)
电磁转矩可表示为:
(3)
运动方程为
(4)
式中,Te为电磁转矩;TL为负载转矩;B为阻尼系数;Ω为机械角速度;J为转动惯量[4]。
2 起/发电控制器设计
起/发控制器接收到系统的“起动命令”后,开始接通起动电动机、燃油泵、点火器等系统装置,此时,起/发电机作为电动机使用,当电机将负载(微型燃机)带转至点火转速时,微型燃机点火成功并开始工作,在电动机的拖动下进入系统的暖机和加速阶段;当微型燃机达到自持转速以上后,此时,起/发电动机进入发电状态,系统正常运行。
结合上述过程,对起/发电控制器的设计分为起动过程控制功能单元、发电过程控制功能单元设计。
2.1 起动过程控制
本项目中电机的电子换向线路采用三相桥式接法,换流制式为二相导通的三相六状态,换流原理如图4所示。
本病例中,27根管入口急弯,采用去除牙本质壁,消除根管入口急弯的方法,但在去除牙本质时应避免侧穿、底穿的发生。预备MB2时应注意[7]:①先用 #8、#10锉配合EDTA凝胶疏通根管;②根据根管弯曲度预弯器械;③扩大根管口和根管上2/3;④结合运用化学预备、X线辅助、根管显微镜等多种手段。
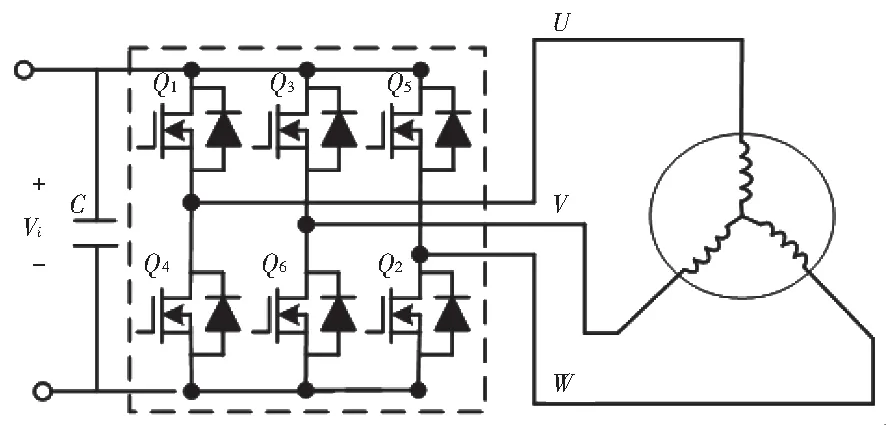
图4 三相星形桥式接法的换流原理图
换流过程如下,令转子磁极轴线与定子U相绕组的轴线的夹角为t电角度:
当t=30°时,Q1、Q6导通,即电源正极→Q1→U→V→Q6→电源负极;
当t=90°时,Q1、Q2导通,即电源正极→Q1→U→W→Q2→电源负极;
当t=150°时,Q3、Q2导通,即电源正极→Q3→V→W→Q2→电源负极;
当t=210°时,Q3、Q4导通,即电源正极→Q3→V→U→Q4→电源负极;
当t=270°时,Q5、Q4导通,即电源正极→Q5→W→U→Q4→电源负极;
当t=390°时,又重复t=30°时的状态。
电枢绕组的导通顺序与功率开关管的导通顺序之间的关系可用表1来表示,其中一个周期内每个功率开关管的导通角为120°电角度,一个磁状态所持续的电角度为60°。
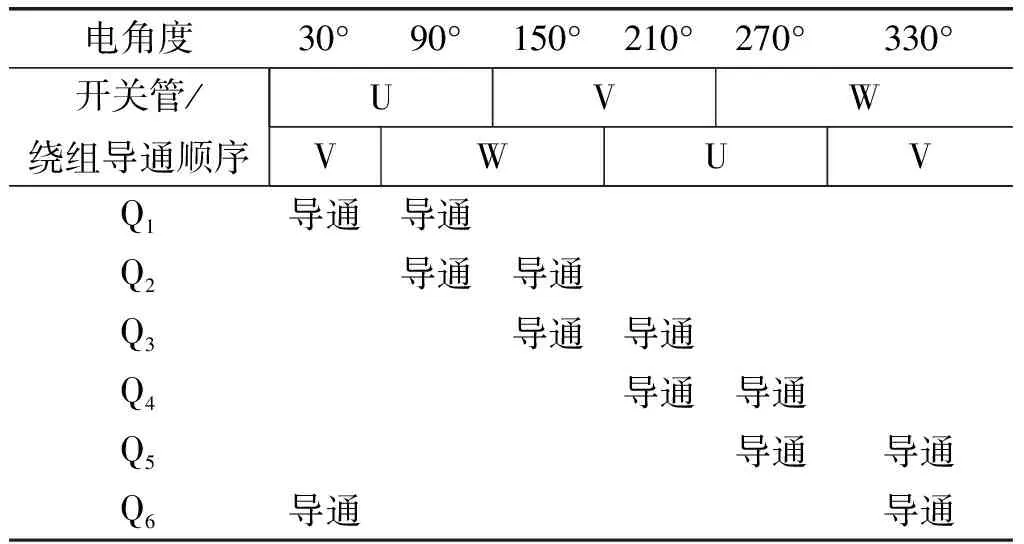
表1 两相导通星形三相六状态导通顺序表
经过对起动过程控制单元功能的实现进行分析,起动控制单元的原理框图如图5所示,主要包括电源管理电路、霍尔调理电路、转速输出电路、起/停控制电路、dsPIC30F4012最小系统、电流采样/处理电路、驱动电路、功率电路等。
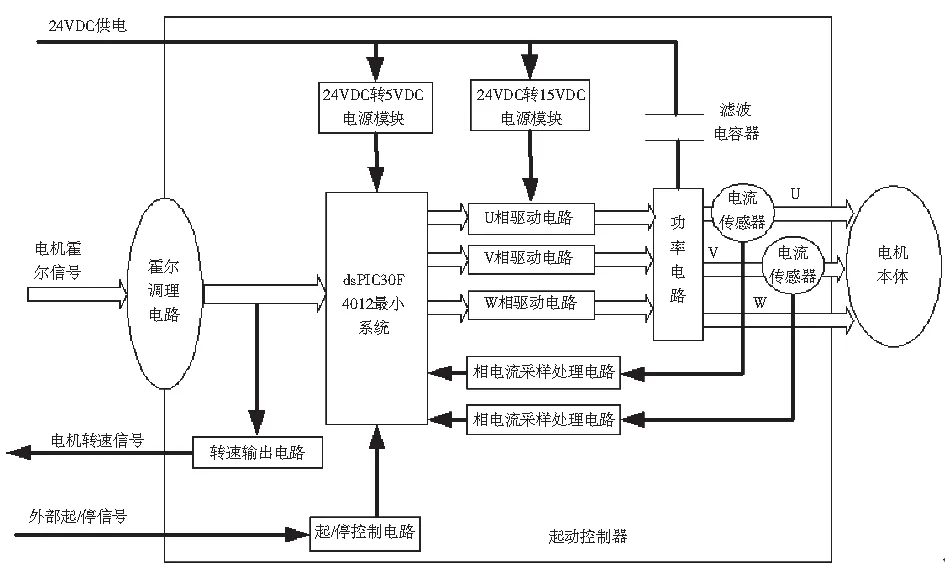
图5 起动控制器组成原理框图
其工作原理是输入功率电源24 VDC电压通过滤波电路后施加在由功率MOSFET管组成的三相功率桥上;霍尔换相信号检测、外部起/停控制信号、相电流采样信号经dsPICF4012最小系统处理后产生PWM控制信号和电机转速输出频率信号,PWM控制信号通过驱动电路、功率驱动模块,输出三组电机方波驱动电压,依次给电机三相绕组通电,从而驱动电机转动。
a)硬件设计
综合本系统所需的I/O口、PWM输出引脚、AD采样等资源,电机驱动使用的微处理器为Microchip公司生产的专用电机控制芯片(dsPIC30F4012),该芯片基于改进的哈弗架构设计,带有灵活寻址模式优化的C语言编译器指令架构,易于软件开发[5-6]。单片机通过对起发电机转子位置的解算、PWM调制信号的生成、电机转速的控制;同时通过电流传感器采集的电流信号、外部给定的起/停信号,经过软件编程实现系统过电流保护和起动过程的开始/停止,其外围电路原理图设计如图6所示。
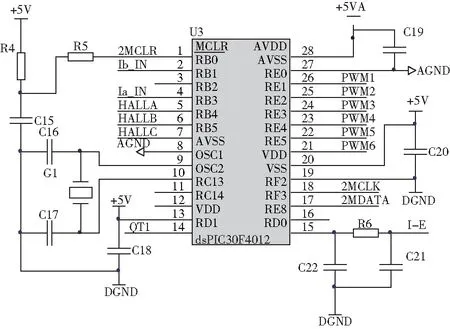
图6 单片机最小系统电路原理图
b)软件设计
采用数字控制方式控制电机运行的核心在于软件,因此整个项目的关键在于软件算法的设计。在本系统中,系统的软件主要由主程序、IO初始化、中断服务子程序几个部分组成。软件中只有一种工作模式,该模式下主要完成控制器的上电初始化、电机起/停控制、运行过程中的过流保护、过流条件下的转速判断、转速输出等功能。该状态下的起动模块软件功能控制流程图如图7所示。
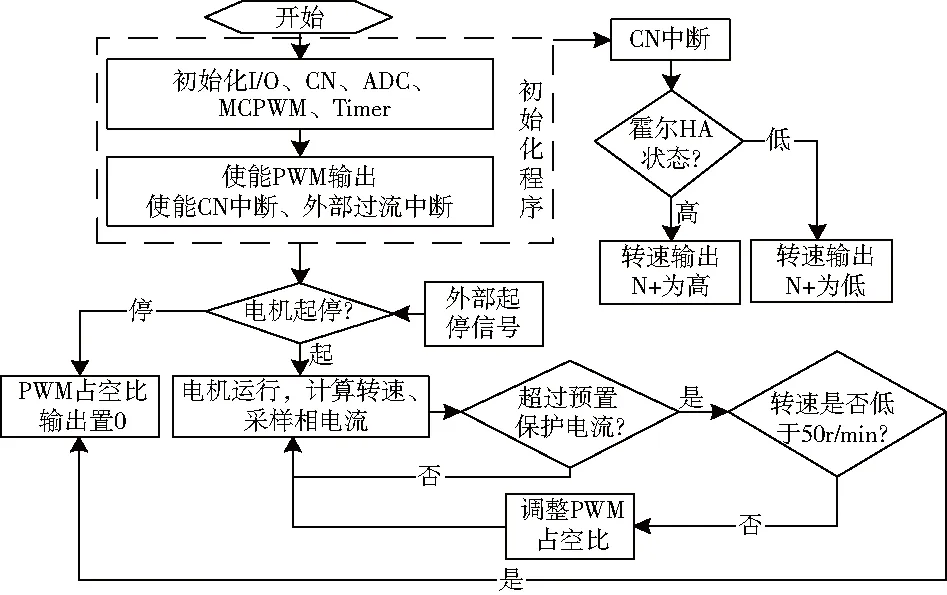
图7 起动模块软件功能控制流程图
2.2 发电过程控制
发电过程控制单元采用三相可控整流器(与起动控制单元共用)+Buck变换器的电路方案,原理框图见图8,在微型燃机的拖动下,起/发电机工作在发电机状态,U、V、W三相交流电压输入三相可控桥式整流,经可控整流桥的续流二极管进行整流后,将输出的三相交流电压转变为脉动直流电压,为减小输入电流脉动,降低电磁干扰,对该脉动直流电压进行LC滤波,后级Buck变换通过PWM控制可实现输出27.5V稳压。
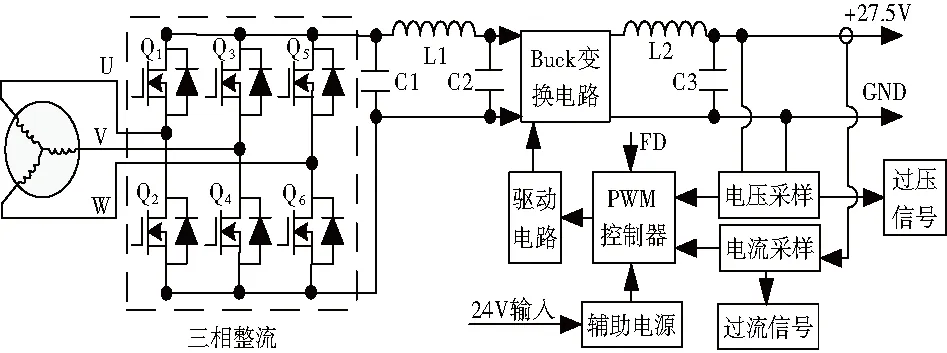
图8 三相可控整流器+Buck变换器原理框图
其工作原理简述为:开关管对整流直流电压进行斩波控制,在开关管的导通期间,输入电流对电感L、电容C进行储能,并向负载提供能量;在开关管的关断期间,电感L通过二极管进行续流,与电容C向负载提供能量。通过调整开关管的导通时间(即占空比)来实现输出电压的稳定,开关频率设置为60 kHz。控制电路的核心为脉宽调制集成电路SG1525,该芯片内部集成了电压基准、误差放大器、锯齿波发生器、脉宽调制器、同步电路、双端口互补输出驱动电路,并具有软起动、死区调节、欠压锁定和输出关断等功能,通过外围器件组成PWM控制电路,通过闭环控制改变脉宽进行稳压,其误差调节方式采用PI调节。
经过对发电过程的仿真计算,各转速输出电压关系如表2所示。
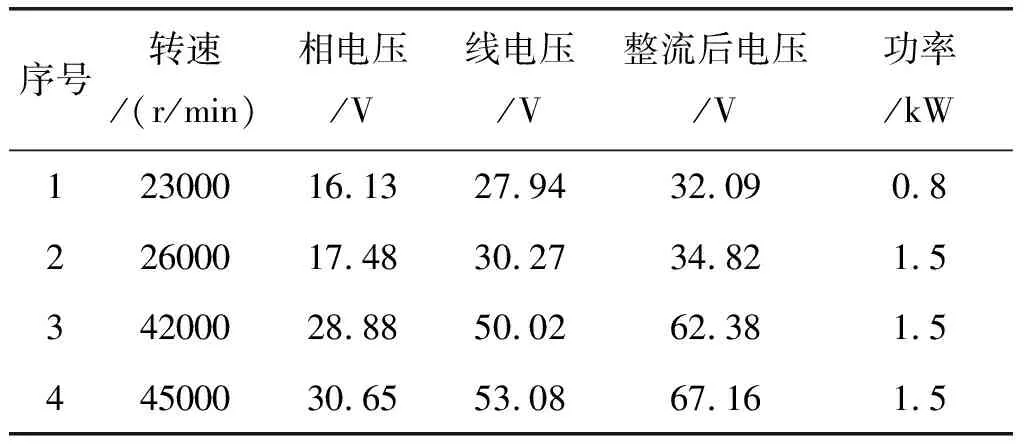
表2 起/发电机发电运行转速与输出电压关系
3 试验
试验系统参数及起发电机的主要设计参数见表3所示。
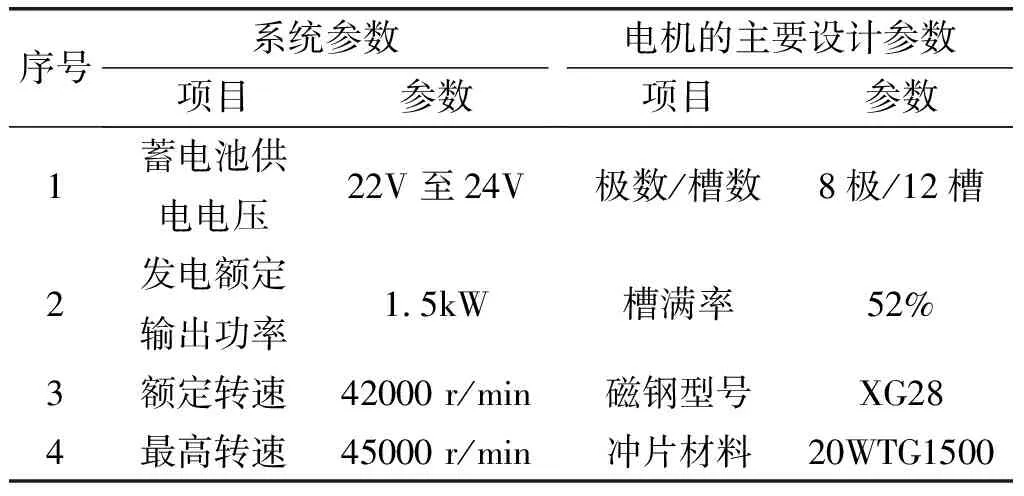
表3 试验系统的参数及起发电机的主要设计参数
起发控制器、起发电机产品实物见图9所示,起动过程的母线电流波形和1.5 kW负载下的发电电压波形见图10所示。
图9 实物样机
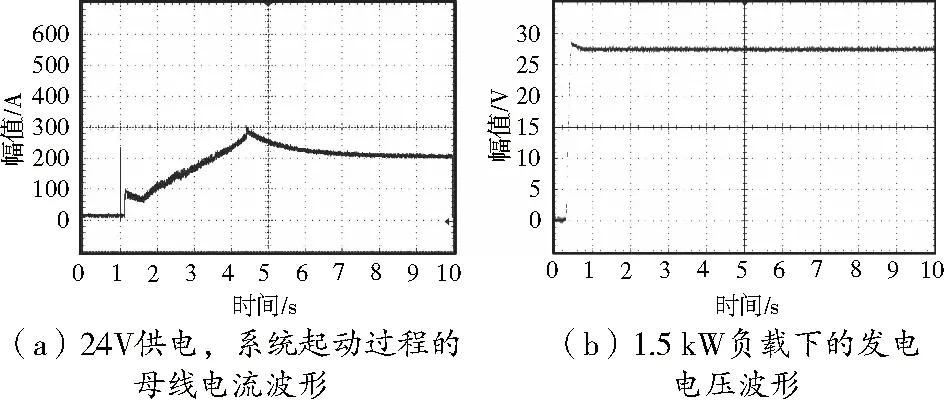
图10 起动过程母线电流、发电过程发电电压波形
从图10的测试波形可以看出,系统的起动过程、发电过程受控,波形正常,从而说明所设计的起/发控制器起动点火成功,到达了系统指标,满足了系统设计要求;通过本项目的研制,并且经过多次系统联试,完全可以替换原进口的起/发系统;解决了起动电流大、成功率低、传动噪声大等问题。
4 结论
本文介绍了无刷直流电动机作为某地面微燃机用起/发电机的控制原理及设计方法,并基于dsPIC30F4012最小数字系统实现其起动过程,共用三相桥式电路作为整流器的BCUK电路实现其发电过程,从实验结果及系统的联试结果看,利用无刷直流电动机作为起/发电机的起动控制、发电等性能参数满足某地面微型燃机系统的性能要求;该方案的成功实现,对新一代地面防化装备、航空、民用等领域用无刷直流电动机起/发控制器的研究积累了一定的工程经验。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22 02:22:28
能源(2018年7期)2018-09-21 07:56:24
石油化工建设(2018年1期)2018-07-10 09:49:50
能源(2017年7期)2018-01-19 05:05:05
电子制作(2017年1期)2017-05-17 03:54:12
照明工程学报(2016年3期)2016-06-01 12:18:01
电测与仪表(2016年2期)2016-04-12 00:24:42
云南电力技术(2015年2期)2015-08-23 01:31:52
电源技术(2015年12期)2015-08-21 08:58:44
电测与仪表(2015年12期)2015-04-09 11:44:44