
两船狭水道交叉相遇避碰规则分析
2021-11-06 03:17郑睿徐祥
世界海运 2021年10期
郑 睿 徐 祥
一、“EVER SMART”轮与“ALEXANDRA 1”轮碰撞案概要
2021年2月19日,英国最高法院下达了Evergreen Marine(UK)Ltd. v Nautical Challenger Ltd[2021] UKSC 6案(以下简称“EVER SMART”轮案)的判决书。该案备受全球海事界的瞩目,因为距离英国最高司法机关上一次判决船舶碰撞案件已经过去了50年。案情简述如下。
2015年2月11日晚,大型油轮“ALEXANDRA 1”轮准备进入阿联酋杰贝勒阿里港卸货。港口指示其在一艘大型集装箱船“EVER SMART”轮驶出航道后再进入航道。22:47时,“ALEXANDRA 1”轮起锚向1号浮标慢速驶近,并在23:15时驶达1号浮标西北偏西1.4nmile处。23:28时,“ALEXANDRA 1”轮船长偶然听到港口控制与一拖轮对话,误认为“EVER SMART”轮要从其船尾保持1 n mile通过,所以操控“ALEXANDRA 1”轮在1号浮标西北偏西方向的引航员等待区内(航道外),以大致东南偏东的航向机动航行。
22:30时,“EVER SMART”轮在一名引航员在船的情况下离开集装箱码头,并沿航道(港内)全速前进。直至23:31时左右,其航向一直把定在313°和314°之间,船速约12.9 kn。22:36时,引航员下船后,“EVER SMART”轮进车加速并一直处于航道左侧航行。
23:42时,“EVER SMART”轮和“ALEXANDRA 1”轮在1号浮标西北偏西方向约925 m处的航道外引航员等待区相撞,碰撞角度约为40°。事故发生时,“EVER SMART”轮和“ALEXANDRA 1”轮的船速分别为12.4 kn和2.4 kn。自23:19时起至碰撞发生时,从“ALEXANDRA 1”轮的角度观察,“EVER SMART”轮的罗经方位没有明显变化,反之亦然。两船发生碰撞前的航行轨迹如图1所示。
该案的争议焦点为:在《1972年国际海上避碰规则》(以下简称《避碰规则》)第9条“狭水道”适用的情况下,第15条“交叉相遇局面”是否仍能适用。
交叉相遇局面是船舶航行的三大互见局面之一。《避碰规则》第15条规定了该局面下两船的行动规则:“当两艘机动船交叉相遇致有构成碰撞危险时,有他船在本船右舷的船舶应给他船让路,如当时环境许可,还应避免横越他船的前方。”如图1所示,在“EVER SMART”轮案中,“EVER SMART”轮位于“ALEXANDRA 1”轮右舷,如第15条适用,后者应为前者让路。最高法院终审推翻了下两级法院的判决,认为根据该案的事实,第15条应当适用。

图1 “EVER SMART”轮与“ALEXANDRA 1”轮碰撞前轨迹
两船在狭水道内、狭水道入口处或附近交叉相遇的情况在航海实践中大量存在,很多港口的入口,如长江口上海港的南槽、北槽,进入南沙港的伶仃水道,新加坡克拉码头的入口等对很多船型都可能构成狭水道。当在这些水域航行时,驾驶员是否能正确理解《避碰规则》第9条和第15条之间的关系,对于保障海上航行安全至关重要。
二、交叉相遇规则的解释原则
(一)交叉相遇规则应尽可能适用
在海上航行中,交叉相遇局面最为常见也最为复杂;[1]据统计,大约有40%的过失碰撞发生在交叉相遇局面下。[2]可以说,交叉相遇规则处于《避碰规则》的核心位置,其规范目的在于防止两艘机动船在交叉相遇的情况下发生碰撞,因此,交叉相遇规则应尽可能得到适用并被严格遵守。
(二)交叉相遇规则的适用不可被良好船艺之运用所替代
在“EVER SMART”轮案中,“ALEXANDRA 1”轮方主张,两船在有碰撞危险且没有任何可明确适用的航行规则时,均由《避碰规则》第2条和第8条中关于运用良好船艺的要求予以填补,即将运用良好船艺本身作为适用交叉相遇规则的替代办法。
该主张未获英国最高法院支持。法院认为:第一,第2条第1款已经明确,恪守《避碰规则》是运用良好船艺应遵循的首要原则。第二,第2条第1款的规范目的并非是为了背离规则,而更像是一个郑重的警告,即遵守规则并不解除海员合理使用技能和谨慎避让的一贯义务。第三,第2条第2款规定:“在解释和遵行本规则各条规定时,应适当考虑到,为避免紧迫危险而须背离本规则各条规定的一切航行和碰撞的危险,以及任何特殊情况,其中包括当事船舶条件限制在内。”实践中,该款体现的规则被称为“背离规则”。该规则体现了一种内在的灵活性,以便应对特定危险和特殊情况。但是,“背离规则”的存在不是为了否认某一条避碰规则的适用,而是为向有限地背离避碰规则提供正当性基础。背离仅能在满足必要性考量且为避免立即发生的危险的特殊情况下才被允许。拟主张“背离规则”适用的一方,必须提供遵守避碰规则势必会造成危险,并且所采取的背离行动符合良好船艺要求的证据。[3]
在通常情况下,有碰撞危险的船舶根据《避碰规则》明确知道各自需要采取的避让行动,比在不清楚对方动态时采取不明确的避让行动更加安全。因此,除非特定案件的情况使得背离成为必要,否则良好船艺之运用不能替代交叉相遇局面下的船舶对《避碰规则》第15条的遵守。“EVER SMART”轮案的情况并不能使背离第15条具有正当性。
三、交叉相遇规则的适用条件
(一)“艏向”“航向”与“方位”的区分
为正确解释交叉相遇规则,必须先理解以下三个术语的内涵:“艏向”(heading)、“航向”(course)和“方位”(bearing)。这也是英国最高法院分析案件的起点。
艏向和航向有时可以互换使用,均指船舶的航行方向,但严格区分两者对于理解规则更具意义。船舶的“艏向”是指船舶在某一特定时刻所指向的方向(用罗经点或度数表示)。船舶的“航向”是指船舶行驶的方向。在有风流影响时,“航向”与“艏向”所指的“方向”就可能相异。“航向”也可以用来描述船舶在一段时间内的总体进度方向,以适应艏向和速度的变化。因此,尽管在某特定时刻,船舶的艏向和速度发生了重大改变,但仍可认为船舶保持了航向。
除航向外,航海学上会涉及的另外一种方向为物标方向,即方位。[4]方位有真方位和罗经方位之分,《避碰规则》使用的是后者。如图2所示,A船与B船之间的方位A1,A2,A3,…,An随着时间的变化T1,T2, T3,…,Tn而不变时,即可认为A船和B船之间保持稳定方位。《避碰规则》第7条第4款第1项规定:如果来船的罗经方位没有明显变化时,则应认为存在两船碰撞危险。

图2 方位稳定示意图
(二)交叉相遇规则的适用不以船舶保持稳定航向为条件
主流观点认为,交叉相遇局面的判定,必须以假定直航船甚至两船的航向持久、相对稳定并能被他船所理解作为前提条件。[5]
在“EVER SMART”轮案中,根据两船的航行数据记录,尽管“EVER SMART”轮在航道航行后期一直处于航道中心线左侧航行,但其对于“ALEXANDRA 1”轮的方位没有显著变化,且在两船碰撞前约30 min内,“EVER SMART”轮的航向始终位于312°至315°之间,足够稳定。但是,从碰撞前26 min开始,“ALEXANDRA 1”轮便在引航员登船区内机动航行以等待时机进入航道,其航向在84°至112°之间不定。因此,尽管“ALEXANDRA 1”轮以东南偏东的大致航向驶近航道端口,但很难将其航向描述为稳定航向。依主流观点,“ALEXANDRA 1”轮的航向并不稳定,因此第15条不适用。
但是,英国最高法院推翻了主流观点,明确了交叉相遇规则适用不以假定直航船或假定让路船保持稳定航向为前提。
1. 规则文义
首先,已如上述,《避碰规则》第二章“驾驶和航行规则”对于规则的适用通常都有清楚准确的条件。但是,根据第15条的文义,除明确的“交叉相遇”要求外,其并未对“航向”有任何要求,更不用说“稳定航向”。没有正当理由仅因第15条表述简洁就认为该条对适用条件的要求与第二章的其他规则不同。
其次,由两船交叉相遇而引起的碰撞危险,并不取决于两船中任何一船的航向是否稳定。结合《避碰规则》第7条第4款第1项,两船只需保持稳定的方位相互接近,碰撞危险即告存在。而且,已如前述,对于所有或专业或业余的海员而言,避碰规则都应当简单、易懂、确定。根据第15条的文义,当一船的值班驾驶员发现他船从本船右舷位置接近(非追越或对遇),且罗经方位没有明显的变化,这就足以让其判定本船为让路船,应及早采取避让行动直至最后驶过让清他船为止。来船方位稳定与否可以通过视觉和助航仪器判断,但航向稳定与否可能难以被观察。将会遇船舶航向稳定作为第15条适用的条件,无疑会增加其适用难度。
最后,如果将会遇船舶保持稳定航向作为第15条适用的额外条件,这会使交叉相遇规则提供的航行安全保障出现真空地带,即在任一一船保持稳定航向之前,除运用良好船艺之外,无其他明确的避碰规则可被适用。而如上所述,交叉相遇规则的适用不可被良好船艺之运用所替代。
2.航海实践
在“EVER SMART”轮案中,“ALEXANDRA 1”轮方主张,除非保持稳定航向,否则两船不会交叉相遇。因此,稳定航向要求是第15条适用的内在要求。这并未获得最高法院支持,因为“EVER SMART”轮案的事实与其明显不符。如上所述,从碰撞前26 min开始,“ALEXANDRA 1”轮就未保持稳定航向,但其最终还是与“EVER SMART”轮交叉相遇并碰撞。
根据海上航行的特点,船舶处于在航状态时,其航向常常难以把定。例如,船舶在拥挤锚地穿梭、停车漂航、接送引航员、舵效因船速降低而变差等情况,其航向都难称稳定。两船交叉航行,相互靠近,只要方位不变,即使他们航向不稳定,也存在碰撞危险。这是因为航向的改变本身可能引起方位的变化,但这种变化可被本船的速度改变或他船的速度和(或)航向的改变予以抵消。简言之,在不稳定航向上的一船仍可能在稳定方位上靠近另一船。“EVER SMART”轮案正是这种情况。
综合规则文义和航海实践可知,方位是判断船舶是否存在碰撞危险的主要指标,航向只是在某一特定时刻或某一段航程内船舶的运动方向。航向的稳定与否,通常可作为判断船舶动态的一个参考因素,但不是评价船舶有无碰撞危险的有效依据。
3.小结
综上所述,英国最高法院对“交叉相遇规则”的适用条件如下:
第一,只要驾驶员发现有他船在本船右舷,构成交叉相遇而非追越或对遇局面,且致碰撞危险时,本船就应按照要求履行安全有效的让路义务。
第二,如果两船在开阔水域对彼此进行一定时间的观察后发现船舶相互靠近(非正前方和正后方)且罗经方位稳定,就形成交叉相遇局面。
第三,不论何种原因,只要出现明显的交叉相遇局面,则交叉相遇规则不会因为假定的直航船未保持稳定航向而不适用。要求直航船保持稳定的航向和速度并不是交叉相遇规则适用的前提条件。只不过,交叉相遇规则适用会给直航船施加“保速保向”的义务。
第四,让路船的情况更是如此。即使几乎处于静止状态,让路船也只有让清航路的义务而没有保持航向的义务。
从表3中土壤养分指标在各个主成分上的载荷值可以看出,在第1主成分上,有机质、全氮和全磷的系数(>0.75)明显大于其它养分指标,即第一主成分代表土壤综合养分;而第二主成分与速效磷(r=0.839)和碱解氮(r=0.795)之间有较大的正相关,与土壤pH值具有较大的负相关(r=-0.736),即第二主成分主要反映土壤速效磷和碱解氮的供应状况;第三主成分则与土壤全钾和速效钾有较大的正相关系数(r=0.643,r=0.853),说明第三主成分主要反映土壤钾素的营养状况。
第五,只要船舶一定程度上处于对地运动的状态,其就不能仅仅因为“等待”而不受交叉相遇规则的约束。不论是等候潮汐还是等待引航员,或者在等待引航员的同时准备进入狭水道或港口,只要船舶在航,则其就可能与他船交叉相遇并构成碰撞危险,使交叉相遇规则得以适用。
第六,在拥挤水域,船舶间的视线受阻可能使方位在一段时间内难以被获取,假定的直航船的不规则的航向将使假定的让路船很难查明本船是否处于交叉相遇局面。因为交叉相遇规则的适用取决于两艘船舶的动态是否能被合理地相互观察到,则在此种情况下,交叉相遇规则不适用。另一方面,即使难以获得方位,但直航船保持稳定航向的事实也可能意味着交叉规则要适用,如适用,则此种稳定航向将使让路船更容易采取让清行动。
四、交叉相遇规则和狭水道规则的相互关系
《避碰规则》第9条第1款规定了船舶沿狭水道航行应遵守的最基本规则,即“只要安全可行,应尽量靠近本船右舷的该水道或航道的外缘行驶”。通常在三种情况下需要分析交叉相遇规则和狭水道规则的关系:第一,两船在狭水道内交叉相遇;第二,两船在狭水道和开阔水域交汇区域交叉相遇;第三,一船穿越狭水道与在狭水道内航行的船舶交叉相遇。
(一)狭水道内的交叉相遇
当两船在狭水道内航行时,只能适用狭水道规则,或狭水道规则与交叉相遇规则都适用。
当两艘在狭水道内对向行驶的船舶相互靠近时,即使航向交叉也不适用交叉相遇规则,而只能适用狭水道规则。因为在该情况下如果两艘船舶都保持在航道的右侧,其中任意一艘船舶不要保持在交叉情况出现时可能的航向上,则可确保航行安全。比如,在弯道航行的船舶,当接近弯道时航向必定交叉,但只要船舶保持在各自的右舷航道,就能在弯道处安全通过。
不过,交叉相遇规则也有在狭水道内适用的情况。例如,在The Leverington (1886)11 PD 117案中,“Leverington”轮从卡迪夫码头沿主航道上行,而“Rapid”轮则从卡迪夫的洛斯内湾沿航道交叉处下行。两个航道都是狭水道且两船都在各自船舶右舷的水道行驶。“Rapid”轮没有保持航向和速度,而是右转以便从“Leverington”轮船头穿过。在到达主航道右侧时,两船发生碰撞。法院认为,尽管狭水道规则适用,但交叉相遇规则也应当适用。如果“Rapid”轮履行直航船保速保向的义务,则碰撞可被避免,因此,“Rapid”轮应为碰撞发生承担全部责任。
(二)狭水道和开阔水域交汇区域交叉相遇
在狭水道出入口与开阔水域交汇的区域,常常存在各种船舶活动。交叉相遇规则和狭水道规则在该水域的适用关系最为复杂,这也是英国最高法院在“EVER SMART”轮案中要解决的核心问题。为便于讨论,英国最高法院归纳了三种情况:第一,接近或从狭水道入口附近路过的船舶,不打算也不准备进入该狭水道且其航行路线也没有穿过狭水道;第二,打算进入狭水道的船舶,最后一次调整航向并准备从狭水道右侧驶入;第三,计划驶进狭水道的船舶,逐渐靠近狭水道入口并准备伺机进入狭水道。
在第一种情况下,交叉相遇规则和狭水道规则应当同时适用。这同穿越航道的船舶与航道内航行的船舶构成交叉相遇局面后适用交叉相遇规则一样,已成为业内共识。换言之,无论何种情形,非打算进入狭水道航行的穿越船(或过路船)与只在狭水道内航行的船舶构成交叉相遇局面后,都不排除交叉相遇规则的适用。
在第二种情况下,仅有狭水道规则应适用。如上文所述,计划进入狭水道的船舶已在入口处作最后的航向和(或)速度调整,并打算从其右舷驶入狭水道。进出两船按照狭水道规则的要求,在狭水道右侧行驶则可以以“左对左”的方式在安全距离上通过。
在“EVER SMART”轮案中,“EVER SMART”轮在遵守狭水道规则的同时“顺便”履行直航船“保速保向”义务的困难并不大;甚至为了方便引航员离船,“EVER SMART”轮在狭水道内作出的减速、转向等操作也不妨碍其遵守交叉相遇规则。假设该案中“ALEXANDRA 1”轮自东向西航行,使“EVER SMART”轮成为让路船时,后者根据规则进行大幅度转向、降速甚至倒车、旋回等避让行动时,就会受到狭水道宽度有限、水深不足、浅滩较多等诸多不利因素的限制。但是,这不意味着作为直航船的“ALEXANDRA 1”轮一定要“保速保向”。根据《避碰规则》第17条第1款第2项和第17条第2款,当直航船发现让路船未按照规则采取适当行动或单凭让路船的行动不能避免碰撞时,直航船可以或应独自采取操纵行动以避免碰撞或采取最有利于避碰的行动。当然,不论直航船如何行动,让路船的让路义务并不被解除。
总之,在第三种情况下,在适用狭水道规则“靠右航行”的同时适用交叉相遇规则,不仅不会造成规则适用上的混乱,反而可以避免产生适用规则的真空地带,以及由此引起的船舶操纵不协调的危险。驾驶员清晰知晓《避碰规则》对各自的操纵要求,远比出现规则适用真空时根据良好船艺所采取的避让行动更能保证航行安全。
(三)一船穿越狭水道与在狭水道内航行的船舶交叉相遇
《避碰规则》第9条第4款规定,如果穿越会妨碍只能在狭水道内安全航行的船舶通行时,则船舶不应穿越狭水道。但是,当一船实际穿越狭水道,与只能在狭水道内安全航行的船舶交叉相遇致有碰撞危险时,交叉相遇规则仍然应当适用。[6]
如图3所示,当B船从东向西穿越狭水道并与A船构成交叉相遇局面致有碰撞危险、交叉相遇点“O”落在狭水道内,根据交叉相遇规则和狭水道规则,A船均拥有航路权,航行时只需“保速保向”即可。B船则应受《避碰规则》第9条第4款和交叉相遇规则的双重约束。

图3 “互见中“船舶穿越狭水道示意图
当B船从西到东穿越狭水道并与A船构成交叉相遇局面致有碰撞危险、交叉相遇点“O”落在狭水道内时,A船应为B船让路,但B船不应妨碍的责任并未被解除。B船在采取不应妨碍行动的同时,应注意配合让路船按交叉相遇规则规定采取的避让行动,使得两船的行动协调一致。[7]A船可以采取减速、停车、倒车或适当转向等避让措施。
图4所示的是一种需要特殊考虑的情况,即遮蔽下的狭水道交叉相遇局面:因狭水道附近水域复杂、交通繁忙,拟穿越狭水道的B船被其他船舶或物体遮挡而与狭水道内航行的A船交叉相遇且致有碰撞危险,但B船直到最后阶段才被发现时,应如何适用规则?

图4 “遮蔽下“船舶穿越狭水道示意图
交叉相遇规则的适用取决于一艘船舶的行为能否被另一艘船舶合理地观察到。换言之,船舶间因遮蔽而不“互见”致使一船不能被另一船合理观察到时,交叉相遇规则不适用,因为规则提供的避碰指导太晚而不利于避让行动的采取。在交叉相遇规则被排除后,仅有狭水道规则可以适用。但是,狭水道规则中的“不应妨碍”一词不像“让路”那样具有同等明确的意义。[8]所以,当船舶因遮蔽而陷入紧迫局面后,仅靠“不应妨碍”的指导远不能避免行动上的不协调。
对此,笔者建议:首先,应考虑通过修订《避碰规则》而明确规定交叉相遇规则和狭水道规则适用的优先级。例如,将绝对航路权赋予在狭水道内航行的船舶。各国在制定地方规则时可以参照日本《港则法》第14条第1款(欲从航道外进入航道,或离开航道到航道外的船舶,须躲避航行在航道上的其他船舶)和第15条(轮船在港口防波堤入口或入口附近与其他轮船相遇时,航入轮船须在防波堤外避让航出轮船)[9]作出类似规定:穿越狭水道或在狭水道附近航行的船舶,当其影响到只能在狭水道内航行的船舶时,就负有绝对的让路义务。这就可以使在狭水道附近行驶的船舶负有绝对的义务去避让因吃水、船型等不宜在狭水道内采取大幅度避让行动的船舶。同时,被他船或他物遮蔽或因遮蔽而不清楚狭水道内他船航行动态的船舶会更加谨慎地接近或穿越狭水道,并且不会因存有本船为假定的直航船的侥幸心理而疏于保持正确瞭望和安全航速。
将航行安全的保护重心放在狭水道内航行的船舶有如下理由:通常情况下,狭水道内浅滩较多、潮流湍急、流向多变;[10]受吃水、船吸、岸推等不利因素的影响,狭水道内船舶在采取大幅度避让行动时较为困难。相对而言,穿越船或在狭水道外行驶的船舶(操限船、失控船、正在捕鱼船等特殊船型除外)一般船型较小、吃水不大,故其操纵灵活,因而易于避让他船。所以,穿越船让路于狭水道内船舶并无不妥。当然,将绝对航路权赋予狭水道内船舶,并不是鼓励其他浅吃水船为了规避让路义务而肆意使用“深水”航道。因此,各国在制定地方规则时应同时考虑乱用航道等问题。
笔者还建议,在条件许可的情况下,港口当局应尽量使锚地、检疫区、引航点等船舶汇聚较密的地方远离航道,以避免船舶因交通拥挤、动态“混乱”或被他船遮蔽等因素干扰而导致其难以被“观察”的局面。
图5所示的是另外一种需要考虑的特殊情况:A船航行于狭水道内,B船在狭水道外行驶。因受天气、风浪或船舶自身等因素影响,B船的艏向和航迹向之间偏差较大且其航迹线与A船航向(航迹向)在狭水道内构成交叉相遇的局面。此种情形虽不常见,但并不排除不会出现,例如在孟加拉国的吉大港河口,受较强潮流影响,船舶艏向与航迹向之间的偏差常常达到90°。该情况可被称为“左舷对左舷”狭水道交叉相遇局面。
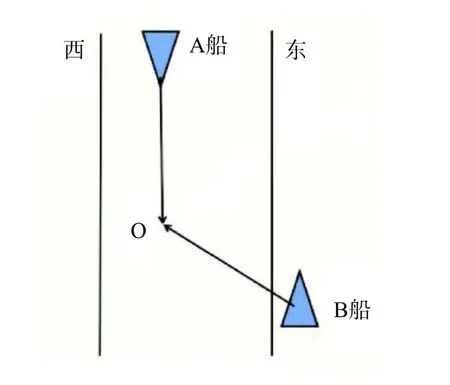
图5 “左舷对左舷“狭水道交叉相遇示意图
为理解这种局面,首先要明确《避碰规则》第15条“……有他船在本船右舷的船舶……”中的“右舷”是指船舶的哪个部分或哪个方位。《避碰规则》第21条第2款规定“‘舷灯’是指右舷的绿灯……”,因航行灯安装于船体之上,所以这里的“右舷”指船舶结构上的右侧部分;同样“船舷侧靠泊”[11]中的“船舷”亦指船体两侧最外层船壳。因此,根据航海习惯,规则中的“舷”应该理解为以通过船舶垂线的纵剖面为分界面,从船尾到船头方向,左侧为左舷,右侧为右舷。所以交叉相遇规则中的“右舷”是指处于本船大于6°舷角(右侧),但小于112.5°舷角(右侧)的位置(非对遇或追越)。[12]
根据上述对“舷”的理解,B船与A船不构成《避碰规则》中的有他船在本船“右舷”的情形,因为交叉相遇局面构成条件要求两艘机动船航向交叉,即从方位和航向上构成交叉相遇局面,而B船在该情形下的航向是指艏向而不是航迹向,[13]所以,交叉相遇规则不适用。
但是,根据英国最高法院对“EVER SMART”轮案的判决,特别是法院对航向和艏向的区分可知,观察B船的运动轨迹方向,可认为B船与A船航向交叉、方位稳定且可能构成碰撞危险,因此,交叉相遇规则应当适用。这就与上文分析结论相悖。
另外,如果排除交叉规则的适用,则根据《避碰规则》第9条第4款,B船作为穿越船应“不应妨碍”A船的航行。然而,在有碰撞危险时,仅依“不应妨碍”提供的操纵指导仍不能防止双方避让行动的不协调,同时也会为法官在碰撞事故发生后界定责任带来一定的困难。
对此,笔者更倾向于从英国最高法院在“EVER SMART”轮案对于“航向”的解释入手来寻求应对建议。国内主流教科书对于“航向”的定义一般为:船舶在航行中,从磁北或陀螺北顺时针计算到航向线的角度。[14]而在“EVER SMART”轮案,英国最高法院认为“航向”是船舶某一段时间或某一航程的大致或平均运动方向,即使航行过程中因合理需要对航行方向作出适当的调整,也能认为船舶行驶在一个相对稳定的航向上。因此,图5中B船在与A船从开始有构成碰撞危险到交叉相遇点“O”时的整个航行轨迹可视为B船在这个过程中的大致航向。所以,B船与A船航向交叉,方位不变,相互靠近并存在碰撞危险,这完全满足交叉相遇规则对于航向“交叉”的要求。
据此,针对上图中谁为让路船的问题,笔者建议在英国最高法院对“航向”分析的基础上突破对“舷”的“狭义”解释,可以以“大致航向”或“航迹向”作为参考,即有他船在本船“航向”或“航迹向”右侧的船舶即为《避碰规则》要求的让路船,这样上图中的A船就顺理成章成为交叉相遇规则下的直航船。
五、结论
《避碰规则》旨在指导船舶避让、保障航行安全,以及在碰撞事故发生后,用以划分船舶过失。英国最高法院对“EVER SMART”轮案的判决厘清了两船狭水道交叉相遇这种复杂局面下时应遵循的具体避碰规则。考虑到《避碰规则》的国际性,这不仅对包括我国在内的各个国家和地区的法院处理类似案件提供了重要参考,还能在航海实践中促进海员准确理解交叉相遇规则,积极、严格地按照规则要求采取有效的避让行动。值得注意的是,在航海实践中谨慎处理交叉相遇规则和狭水道规则之间的相互关系,远比在发生事故后才界定责任更为重要,因为保证安全航行才是《避碰规则》制定的初衷。全文结论如下:
第一,交叉相遇是航海实践中最为复杂的船舶互见局面。《避碰规则》第15条交叉相遇规则虽然措辞简练,却处于整个《避碰规则》的核心位置,应尽可能得到适用并被严格遵守。交叉相遇规则的适用不能被“良好船艺”之运用轻易替代。
第二,交叉相遇局面的判定或交叉相遇规则的适用并不以假定直航船或假定让路船保持稳定航向为前提。
第三,在常规交叉相遇局面中,规则较为清晰:让路船及时采取有效措施,力求“驶过让清”;直航船则“保速保向”,并在规则允许时独自采取避让行动。但是,当狭水道内航行的船舶与狭水道外欲进入该水道的在航船构成交叉相遇局面并有碰撞危险时,除非后者已经处于狭水道端口,最后一次调整航向并准备从狭水道右侧驶入(该情况下仅有狭水道规则适用),否则交叉相遇规则和狭水道规则应当同时适用。为更好地避免碰撞事故发生,两船在遵守狭水道规则的同时,完全可以按照交叉相遇规则的要求对船舶进行适当调整。
第四,交叉相遇规则对遮蔽下的交叉相遇局面的适用存在困境,建议各个国家或地区在修订或制定地方规则时规定,在航道(狭水道)内航行的船舶有绝对的航路权,被他船或他物遮蔽或因遮蔽而不清楚航道(狭水道)内他船航行动态的船舶有绝对的避让义务,应更加谨慎地接近或穿越狭水道。
第五,交叉相遇规则对“左舷对左舷”的交叉相遇局面之适用存在困境,建议参考英国最高法院在“EVER SMART”轮案中对于“航向”的分析,对规则中的“右舷”进行目的性扩张解释,将有他船在本船“航向”或“航迹向”右侧的船舶视为规则要求的让路船。

猜你喜欢
中国石油大学学报(自然科学版)(2022年3期)2022-07-26
舰船科学技术(2022年10期)2022-06-17
华人时刊(2022年7期)2022-06-05
新世纪智能(高一语文)(2021年3期)2021-07-16
特种油气藏(2020年2期)2020-06-07
民用飞机设计与研究(2019年4期)2019-05-21
饮食与健康·下旬刊(2018年3期)2018-04-11
小猕猴智力画刊(2018年2期)2018-02-26
电子制作(2017年24期)2017-02-02
中国火炬(2011年1期)2011-08-15
