橡胶衬套动态力学特性对平顺性的影响研究
2021-11-06 08:47:54吴利广李广景立新
汽车工程师 2021年10期
吴利广 李广 景立新
(1.中国汽车技术研究中心有限公司;2.中汽研汽车检验中心(天津)有限公司)
平顺性是汽车性能的重要性能之一,如何降低车辆行驶时由路面及发动机传递到乘客的振动,成为汽车行业普遍关注的问题。橡胶衬套作为缓冲元件,发挥着减振降噪和弥补制造公差的作用,在汽车的平顺性、操纵稳定性及高频的NVH特性上有着很大影响[1]。文献[2-5]通过建立数学模型对橡胶衬套的动态力学特性进行研究。通过Adams/Ride模块建立包含前悬架下摆臂后橡胶动态力学特性模型并进行参数识别,将包含动态力学特性的橡胶衬套导入到整车模型中,进行平顺性仿真,研究橡胶衬套动刚度对于平顺性的影响。
1 橡胶衬套动态力学特性分析
橡胶衬套的动态力学特性指橡胶衬套的力-位移或应力-应变随温度、时间、预载、幅值及频率等变化所产生的对应关系的变化。本文主要对橡胶衬套的力与位移关系随幅值、频率变化进行分析,橡胶衬套与频率相关的特性称为粘弹性,与幅值相关的特性称为弹塑性。目前,学者对于橡胶衬套动态特性的研究,均将其影响因素单独进行分析,认为影响因素不是相互关联的[6]。
橡胶衬套的动态力学特性表现有迟滞特性,经过试验发现,随着橡胶衬套动态力学试验振幅增加,橡胶衬套的迟滞效应明显增加。学者研究其原因为:橡胶衬套在产生较大变形时,会表现出摩擦阻尼的特点,简称摩擦迟滞特性[7]。Adams软件中采用的模型为Bouc-Wen模型。Bouc-Wen模型是基于Bouc模型修改提出的,通过使用1阶微分方程描述非线性光滑迟滞模型。
橡胶衬套的粘弹性指通过应力松弛函数和蠕变函数进行与时间相关的依赖性的描述,通过储能模量、损耗模量及损耗因子进行频率相关性描述。储能模量与损耗模量的矢量和为动刚度。储能模量指在橡胶衬套承受交变载荷变形时,由于材料的超弹性而储存的能量;损耗模量指由于橡胶衬套存在阻尼特性,能量以热能方式散失;损耗因子是损耗模量与储能模量的比值,损耗因子的值越大,滞后越大,材料阻尼特性越强。
橡胶衬套的粘弹性模型由1个或多个弹性元件、阻尼元件进行串联、并联等不同方式组合构成。弹性元件描述橡胶衬套的弹性部分,弹簧元件与阻尼元件组合来描述橡胶衬套的粘性部分。Adams软件中采用的模型为自带模型,如图1所示。
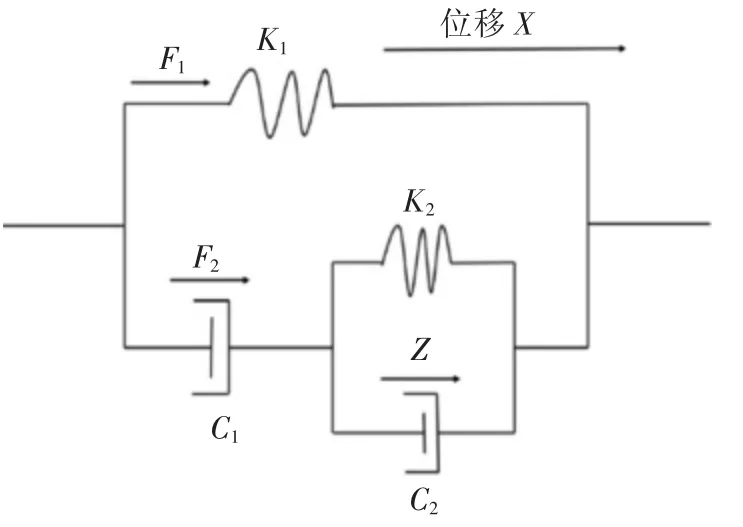
图1 Adams中橡胶衬套频率相关性模型
模型由一个Kelvin-Voigt模型串联一个阻尼元件,与之并联一个弹性元件组成。模型的应变与刚度系度为K1的弹簧元件应变相等,模型的应力等于刚度系数为K1的弹簧元件与阻尼系数为C1的阻尼元件应力之和。模型的输入为力,输出为位移;力与位移的关系为:

式中:K1、K2——模型刚度系数;
F1—模型线性力;
F2—模型非线性力;
X—模型加载位移;
Z—阻尼元件位移
C1、C2——模型阻尼系数;
Flin——橡胶衬套受力。
2 橡胶衬套动态力学特性建模与验证
2.1 橡胶衬套动态力学特性参数识别
通过ADAMS/Ride模块建立橡胶衬套模型,并进行参数辨识。辨识前需要橡胶衬套静态、动态刚度试验数据,最少需要3组幅值且每个幅值对应的频率不少于4组的动刚度试验数据。不同幅值对应的频率大小顺序必须相等。
采用IPIT识别SUV车型中前悬架后下摆臂橡胶衬套试验数据,如图2所示。图中Beta、Gamma、A、N分别为橡胶衬套幅值相关性中摩擦模型Bouc-Wen模型的识别参数;Num和Den是进行橡胶衬套频率相关性识别参数;Linear Preload和Linear Offset为试验预载;Alpha为Bouc-Wen模型线刚度;K为线性刚度;由于版本原因,Adams2013版不采用Zeta、Omega识别参数。
在Error Control、Solver Control、Strategy Control中,可以更改参数识别的算法(包括最小二乘法以及软件自带算法)、迭代次数、收敛容差、周期、损耗角与动刚度比例及传感器设置等等。参数识别对话框中X、Y、Z、AX、AY、AZ表示衬套刚度的6个方向,IPIT一次只能识别1个方向的参数。
将IPIT中的参数更改完成后,进行参数识别。识别结果如图2所示(以前悬架下摆臂后衬套X方向为例)。

图2 前悬架下摆臂后橡胶衬套X方向IPIT参数识别前后对比界面
2.2 橡胶衬套动态力学特性验证
通过Adams/Car软件中Template、Subsystem、Assembly模块建立橡胶衬套的装配体模型,将建立的橡胶衬套模型进行频率仿真试验:迭代次数:10;步数:256;频率范围:1~100 Hz;幅值:0.2 mm。仿真结果如图3、图4所示。

图3 幅值0.2 mm时仿真与试验动刚度对比

图4 幅值0.2 mm时仿真与试验损耗角对比
由图可知,当幅值相同时,随着频率增大,橡胶衬套的刚度和损耗角越来越大,阻尼越来越小。通过参数辨识,得下摆臂后橡胶衬套X向的动刚度参数,在80 Hz以下能够较好地拟合橡胶衬套的试验曲线,满足平顺性分析需要,验证了X向参数的可行性。通过相同的方式,得到其他方向的参数,如表1所示,并验证了各个方向参数的准确度,为将橡胶衬套动刚度加载到整车模型中分析提供了依据。
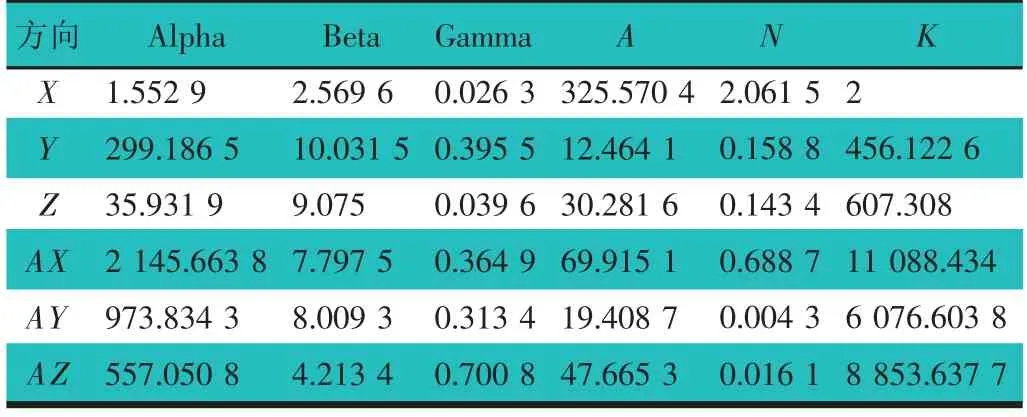
表1 下摆臂后橡胶衬套各个方向拟合参数
3 橡胶衬套动态力学特性对平顺性影响研究
3.1 建模及验证
在Adams/Car中建立整车多体动力学模型,如图5所示,通过Replace替代原模型中橡胶衬套进行平顺性仿真。仿真车型SUV在随机路面上分别以40~80 km/h的车速匀速行驶,采样频率为200 Hz。仿真车速采用40~80 km/h,可以保证时间频率在0.33~28.3 Hz范围以内,保证能够覆盖车身的固有频率范围1~2 Hz以及车轮的固有频率范围10~15 Hz。

图5 多体动力学模型
测量点及加权加速度计算参照《汽车平顺性随机输入行驶试验方法》,分别测量座椅靠背、座椅支撑面、脚支撑面3个位置,在随机路面以不同速度匀速行驶时的3个方向的加速度。由于本文整车多体动力学模型中没有建立座椅模型,考虑脚支撑面处的3个方向的加速度值及加权加速度均方根值进行分析。
随机路面下以40 km/h匀速行驶时的脚支撑面处各方向加速度曲线如图6~图8所示,可知:以40 km/h行驶工况下为例,包含橡胶衬套动态力学特性的模型在匀速行驶时,由于橡胶衬套刚度随着频率的增大而增大,悬架刚度增大,橡胶阻尼提供的减振效果小于刚度的变化,从而使其脚支撑面处的纵向、侧向、垂向的加速度值比不包含橡胶衬套动态力学特性的模型大,且更加接近于试验值。试验车型SUV衰减没有问题,但是可能在过凹凸不平路面时,上下振动感容易受到影响。
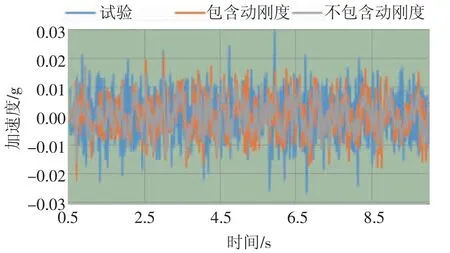
图6 随机路面下以40 km/h匀速行驶时的脚支撑面处纵向加速度曲线
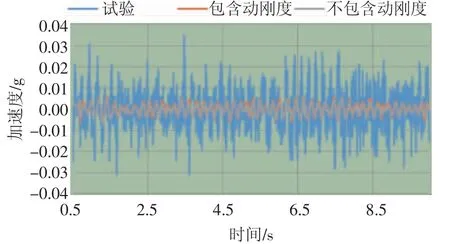
图7 随机路面下以40 km/h匀速行驶时的脚支撑面处侧向加速度曲线
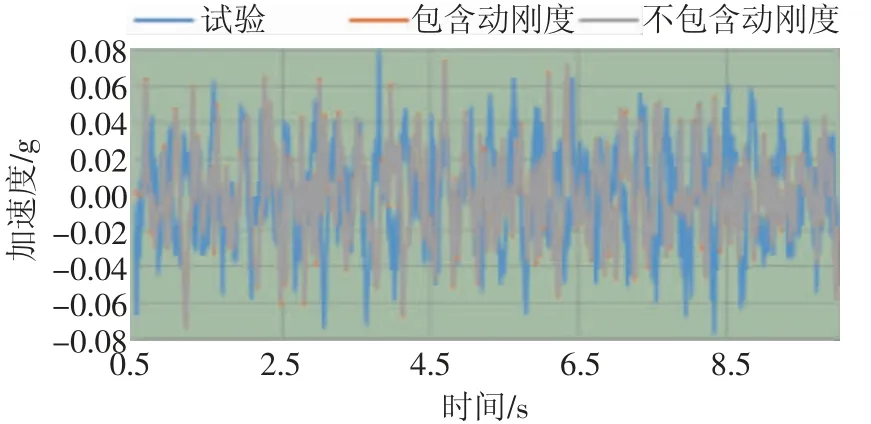
图8 随机路面下以40 km/h匀速行驶时的脚支撑面处垂向加速度曲线
对比脚支撑面处X、Y、Z的3个方向处加速度值,垂向、纵向的加速度大小对于车辆平顺性的影响较大,而橡胶衬套动态力学特性对于纵向的变化最为明显。
分别对车速为40 km/h、50 km/h、60 km/h、70 km/h及80 km/h工况下,脚支撑面处的3个方向的加速度进行加权计算,分析加权加速度均方根值与车速的关系。包括:不包含橡胶衬套动态力学特性的整车多体动力学模型、包含橡胶衬套动态力学特性的整车多体动力学模型、试验车型SUV试验值,结果如表2、图9所示。
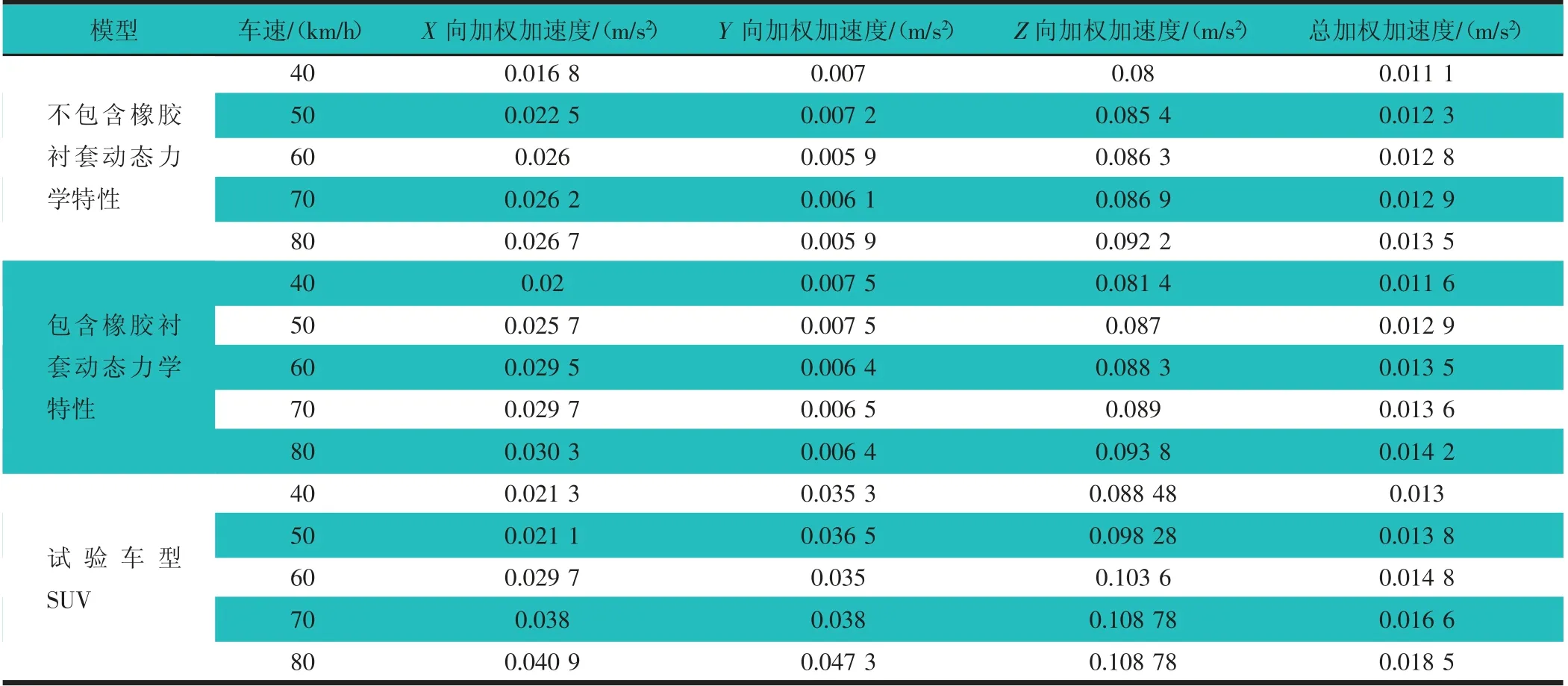
表2 脚支撑面处加权加速度
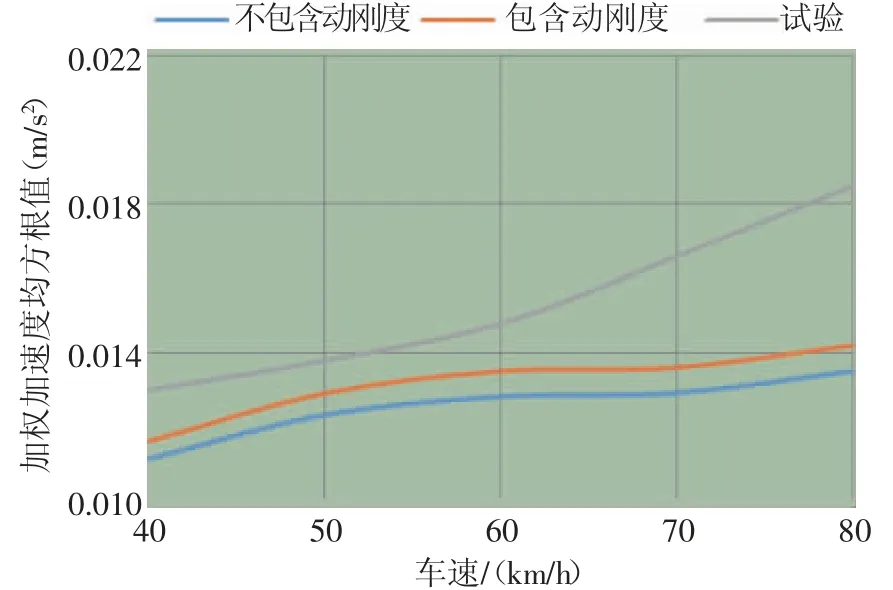
图9 脚支撑面处总加权加速度均方根值与车速的关系曲线
当路面不平度系数确定时,随着车速增加,时间频率功率谱密度增大。脚支撑面处纵向、侧向、垂向的单项加权加速度均方根值随着车速的增加,呈增大趋势,脚支撑面处总的加权加速度均方根值随车速增加呈增大趋势,且包含橡胶衬套动态力学特性模型的仿真值与试验数据更加接近。车型在车速60~80 km/h时脚底板支撑处可能会感觉有抖动,传递给脚部细微的带有坚硬感的振动。
3.2 橡胶衬套动刚度对于平顺性影响分析
以前悬架下摆臂后橡胶衬套为研究对象,研究橡胶衬套刚度变化对于车辆平顺性的影响。通过改变识别参数,使橡胶衬套的动刚度值分别增大30%与减小30%,如表3、图10所示。研究橡胶衬套刚度变化对于驾驶员脚支撑面处纵向、侧向、垂向加速度的影响,以试验车型SUV多体动力学模型为基础,40 km/h匀速行驶过随机路面工况为例,进行分析。

图10 前悬架下摆臂后橡胶衬套动刚度变化曲线

表3 前悬架下摆臂后橡胶衬套动刚度变化的识别参数
40 km/h匀速行驶脚支撑面处各向加速度对比曲线如图11~图13所示,可知:当试验车型SUV多体动力学模型以40 km/h匀速行驶通过随机路面时,随着前悬架下摆臂后橡胶衬套动刚度增大30%,驾驶员脚支撑面处纵向、侧向、垂向加速度增大;随着前悬架下摆臂后橡胶衬套动刚度减小30%,驾驶员脚支撑面处纵向、侧向、垂向加速度减小。其中驾驶员脚支撑面处纵向、侧向受橡胶衬套动刚度变化影响,加速度变化比较明显,垂向加速度变化较小,说明前悬架下摆臂后橡胶衬套对于车辆纵向及侧向的振动影响较大,对于垂向的振动影响较小。

图11 40 km/h匀速行驶脚支撑面处纵向加速度对比曲线

图12 40 km/h匀速行驶脚支撑面处侧向加速度对比曲线

图13 40 km/h匀速行驶脚支撑面处垂向加速度对比曲线
4 结论
通过Adams/Car软件建立了试验车型SUV的整车多体动力学模型,并通过Adams/Ride模块建立了包含动态力学特性的橡胶衬套模型,导入到整车多体动力学模型中进行平顺性仿真,仿真获取了驾驶员位置脚底板支撑面处纵向、侧向、垂向处的加速度以及加权加速度均方根值,与试验数据进行对比分析,包含橡胶衬套动态特性的整车模型所得到的结果与试验结果更加接近。
通过改变橡胶衬套的识别参数,改变前悬架下摆臂后橡胶衬套的动刚度大小,使动刚度分别增大、减小30%,进而进行平顺性仿真。仿真结果表明,前悬架下摆臂后橡胶衬套动刚度对于车辆纵向振动影响较大。
猜你喜欢
中学生数理化·中考版(2023年7期)2023-06-27 09:01:14
汽车实用技术(2022年12期)2022-07-05 11:11:14
汽车零部件(2021年7期)2021-07-29 07:11:56
快乐语文(2021年11期)2021-07-20 07:41:32
快乐语文(2020年30期)2021-01-14 01:05:28
探索科学(学术版)(2019年11期)2019-06-16 07:38:54
汽车实用技术(2018年20期)2018-10-26 08:19:54
科技信息·下旬刊(2018年9期)2018-10-21 13:36:26
电镀与环保(2017年6期)2018-01-30 08:33:37
北京汽车(2016年6期)2017-01-06 05:32:28