
基于图像特征融合的农事活动行为的识别
2021-11-04 12:28李子茂余慧夏梦郑禄徐杰
湖南农业大学学报(自然科学版) 2021年5期
李子茂,余慧,夏梦,郑禄,徐杰
基于图像特征融合的农事活动行为的识别
李子茂1,2,余慧1,2,夏梦1,2,郑禄1,2,徐杰1,2
(1.中南民族大学计算机科学学院,湖北 武汉 430074;2.湖北省制造企业智能管理工程技术研究中心,湖北 武汉 430074)
针对农事活动图像中人体姿态所隐含的行为信息以及人与农具所隐含的关联信息,提出了一种基于图像特征融合的农事活动行为的识别方法:利用人体姿态估计技术OpenPose提取农事行为关节点位置信息,利用目标检测YOLOv3提取农事行为中农具的位置和分类信息,用以构建农事行为的距离空间特征矩阵和角度空间特征矩阵,并将这些特征进行图像特征融合,建立基于图像显式特征和隐式特征融合的农事活动行为识别方法EI-SVM,实现农事活动行为的识别。试验结果表明,EI-SVM方法对农事活动行为识别的准确率可达94.87%,在公用数据集上准确率达到92.39%。
农事活动;人体姿态;行为识别;目标检测;图像特征融合
计算机视觉技术在行为识别上的应用,传统方法是手工提取图像特征[1],近几年利用机器学习或深度学习[2]提取图像特征并进行特征融合成为常用的方法[3-4]。对静态图像行为的特征挖掘发现,人体姿态可作为行为识别的一个较好的出发点。利用人体姿态估计[5]对于农事活动行为识别,可以利用图像数据中的表象特征,如农具类别、肢体姿态来区分单张静态图像的动作[6]。人类农事活动行为有一些比较显著的特征,如除草时人的腿部呈交叉状、手部与身躯存在一定角度等。如仅仅将人体姿态估计运用到行为识别任务中还不足以描述行为动作,还应考虑所使用农具在行为动作交互时的特征,如除草行为以农具锄头作为行为的交互工具;因此,利用目标检测[7]对农事图像中的农具进行特征提取,可最大化地利用图像中的特征。
在基于特征提取的行为识别中,TANG 等[8]提出基于图像的神经网络来捕捉关节连接点之间的依赖关系,进行行为识别,但该方法仅提取了人体信息,丢失了与人交互的物体信息;CHOUTAS 等[9]使用人体关节作为关键点,编码后将获取的特征图输送到简单的CNN中,即可用来进行行为识别分类,但该方法对于相似行为的动作识别度不高;LIU等[10]设计了一种基于骨架的人类动作 HDS-SP描述符,利用空间和时间信息基于骨架实现行为识别,但由于骨架图仅能提取关节的局部物理依赖关系,难以捕捉隐藏的隐式关节相关性;LI 等[11]提出了A-link 推理模块的编码解码器结构,直接从动作中捕获潜在依赖性,扩展骨架图以表示更高阶的依赖,提出了行动结构图卷积网络,该方法准确度较高,但网络也较为复杂。针对GCN 网络仅捕获关节之间的局部物理依赖关系,并且不加选择地使用所有骨骼数据的问题,DING 等[12]提出了基于语义的图形卷积网络,实现骨架特征的灵活图形表示,用于基于骨架的行为识别,但该网络复杂度也较高。
将人体姿态估计和目标检测技术运用到人、物交互的图像行为识别中具有更好的识别效果,在农事活动行为的人与农具交互活动中,对农具和人体姿势的相互关系进行建模[13-14],基于此,笔者首先利用农事活动的人体姿态估计OpenPose模型[15]得到的关节点坐标作为显式特征,构建农事活动行为空间关系矩阵,实现农事活动行为的隐式行为特征构建;再利用目标检测YOLOv3模型[16]获取农具的分类和位置信息作为显式特征,构建农具与对应农事活动行为的人体关节点的空间关系矩阵,实现农事活动行为的隐式关系特征构建;融合显式特征与隐式特征作为特征向量,作为分类器支持向量机(SVM)[17]的输入,训练模型获取分类结果,以期得到更准确的农事活动行为识别方法。
1 农事活动行为特征的构建
不同类别的农事活动图像中可能存在相似的行为(例如除草和浇水等),即使是同一行为类别的图像,也可根据它们之间的细小差别,来区分不同行为类型(例如除草动作有正在除草或者拿着农具在休息等),仅通过人体姿态的特征并不能较好地识别农事活动的行为。对于农事活动行为,人体姿态和使用工具都是影响行为动作识别的因素。为解决2种行为可能存在类似行为动作的问题,区分农具相同但行为动作差异较大的图像,拟通过人体姿态估计获取人体关节点信息,利用目标检测获取农事行为中的农具特征信息,结合两者提取出图像显式特征,并且利用显式特征手工构建隐式特征,增强静态图像表示能力,实现对农事行为特征的最大化提取。
1.1 显式特征的提取
利用OpenPose模型[15]的第1个卷积层分支获取人体肢体部位的置信图信息,对关节点的坐标进行预测;再在下一个分支对输入的特征进行卷积训练,输出关节点亲和度向量场,输入关节点亲和度向量场和原始图像特征,获取人体身体部位的亲和域信息,对关节点的连接组成集合,提取静态图像的姿态特征,进行人体姿态特征构建。通过OpenPose获取人体骨架图及18个关节点坐标,作为图像中行为动作的显式信息。
采用YOLOv3模型[16]对农事活动图像中不同大小的农具进行检测。由于农事行为存在人和农具的交互,通过YOLOv3获取农具的类别和位置信息,作为图像中行为动作的显式信息。
考虑到农事活动图像中人与农具之间及人体姿态本身所隐含的关联结构信息,从显式特征中提取隐式特征,引入关键关节点与农具之间的距离作为隐式特征中的关系特征,并且引入行为动作人体姿态的关节角度作为隐式特征中的行为特征,将2种特征作为静态图像行为动作的隐式特征。
1.2 隐式特征的构建
根据不同类型农事活动行为整体所具备的特征,手工选取与农事活动行为动作关联较为密切的8个关节点,通过OpenPose提取了18个关节点坐标,通过归一化处理已知坐标序列中的(3,4,6,7,9,10, 12,13),即右肘、右手首、左肘、左手首、右膝、右足首、左膝、左足首的8个坐标以及农具的位置坐标,计算8个关节点与农具两点连线后的距离(),构建农事活动行为关键关节点的距离空间矩阵(DSM)。
为了加强图像特征的表示,在获取图像人体姿态显式特征的基础上,提取图像中人体姿态所特有的结构作为隐式特征中的行为特征。根据不同类型农事活动行为整体所具备的特征,手工选取6个角度变化较为明显的关节点对。通过人体姿态估计坐标图的已知坐标序列中的(2,3,4),(5,6,7),(1,8,9),(8,9,10),(1,11,12),(11,12,13),即右肘角度、左肘角度、右腰角度、右膝角度、左腰角度、左膝角度,计算每一个数据中两点连线后形成的角度(),构建农事活动行为关键关节点的角度空间矩阵(ASM)。
2 基于特征融合的EI-SVM方法
通过OpenPose模型提取图像中18个人体骨骼点坐标,将坐标点归一化处理后与关节点次序一一对应进行存储。通过YOLOv3模型提取图像中农具的位置和分类信息,将检测框的中心点坐标归一化处理后记为农具的位置信息,分类信息由模型输出即可获得。此时显式特征向量由18个[,]关节坐标点数据,以及1个[,,]农具数据组成,最终,图像的显式特征向量的维度为[1,39]。
隐式特征中包含关系隐式特征和行为隐式特征。2个特征分别由距离空间矩阵(DSM)与角度空间矩阵(ASM)描述。为了提取DSM,在训练阶段提取8个关节点与农具的距离,提取所有训练集中距离的最大值与最小值形成DSM,此时图像的关系隐式特征向量由8个[min,max]数据组成。为了提取ASM,在训练阶段提取手工选择的关键关节点形成的角度,提取所有训练集中角度的最大值与最小值形成ASM,此时图像的行为隐式特征向量由6个[min,max]数据组成。最终融合关系和行为隐式特征,隐式特征向量的维度为[1,28]。其中,min和max分别表示关系隐式特征向量中的最小距离和最大距离,min和max分别表示行为隐式特征向量中的最小角度和最大角度。
将图像的显式特征向量和隐式特征向量组成总特征向量,共同输入到分类器SVM中。通过寻优找到模型合适的核函数以及相关参数,利用训练好的模型对预测集进行评判。
根据显式和隐式图像特征,提出基于图像显式特征(explicit features)和隐式特征(implicit features)融合的农事活动行为方法——EI-SVM。结构上分为两部分,第一部分为特征提取,第二部分为特征构建。特征提取即利用目标检测和人体姿态估计提取已有的显式特征,特征构建即利用显式特征构建隐式特征。
训练模型:
a) 利用OpenPose计算人体关节点坐标并将其归一化;
b) 利用坐标点计算关键关节点的角度;
c) 提取训练集中每个角度对应的最大值与最小值,构建ASM;
d) 标注图像中农具,训练YOLOv3模型,对数据集构建合适的锚框(AnchorBox);
e) 使用训练效果最佳的YOLOv3模型提取农具的位置和分类信息;
f) 利用YOLOv3提取的农具检测框中心点坐标,计算中心点到关节点的距离;
g) 提取训练集中所有2个坐标点之间的最大值与最小值,构建DSM;
h) 融合以上特征作为特征向量,输入到SVM分类器,对模型进行训练。
预测模型:
i) 分别利用OpenPose模型与YOLOv3模型提取图像中的人体关节点坐标和农具位置以及分类信息;
j) 构建DSM,此时最大值max为目标检测得到的检测框的中心点坐标到关节点的距离,最小值min为检测框的角点到关节点的距离;
k) 构建ASM,此时最大值max为3个关节点形成的角度,最小值min为训练集中对应关节点位置的最小值;
l) 融合以上特征作为待识别图像的特征向量,输入到训练好的SVM分类模型中,分类输出结果。
3 结果与分析
3.1 数据集
采用自建数据集对提出的行为识别方法进行评价,拍摄3类农事活动图像,大小3456像素×4608像素,每一类农事行为都有休息状态,而休息状态的图像在行为识别分类时将与工作状态的图像有类别区分,如图1-4除草休息状态在行为分类时将不会作为图1-1除草类别。调整图像大小后,输入到神经网络中提取特征,其中训练图像和测试图像按8∶2随机分配。为增强模型的泛化能力,对原始图像进行数据增强处理,如图像翻转、缩放,对比度、锐度、色调、色彩饱和度调节等。

1 除草;2 浇水;3 喷药;4 除草休息状态;5 浇水休息状态;6 喷药休息状态。
为验证模型的有效性,选取PPMI公开数据集(为人与乐器交互行为的数据集,与人与农具交互行为存在类似性)进行验证。该数据集包含2种场景且每种场景对应12类图像,其中2种场景为人与乐器进行交互的行为动作和手持乐器非交互动作,用以对应农事活动数据集中的工作状态和休息状态。12类图像分别对应12种不同的乐器,每一类约200张,对该数据集进行图像增强处理。
3.2 试验环境设置
试验采用PyCharm集成开发环境,在Python 3.7.2环境下进行,计算机配置为主频3.40GHz4,核CPU,8G内存。
3.3 行为识别结果
经特征提取后,由OpenPose提取的显式和隐式特征的维度共为[1,48]。对YOLOv3进行模型训练,其中每批次图像50帧,学习率调节参数步长10 000,速率0.001,提取出9个最佳锚框(AnchorBox),提取出农具显式特征并与人体关节点构建的距离隐式特征的维度共为[1,19]。将大小为[,67]的特征向量作为SVM的输入进行类别分类,其中为训练集个数。选取了SVM中4个适用于分类的核函数(linear线性核函数、poly多项核函数、rbf高斯核函数和sigmoid核函数)进行对比。由于试验数据集在数据增强后约有10 000张,通过GridSearchCV进行参数寻优,实现自动调参,并用SVM中用于分类的SVC方法进行分类。结果表明,rbf核函数的效果最佳,支持向量的维度为[168,74,37,69]。利用rbf核函数处理非线性分类问题,不同的惩罚系数和参数gamma对模型有不同的评价。越小,容易欠拟合;越大,容易过拟合。gamma值越大,支持向量越少;gamma值越小,支持向量越多。通过十叠交叉验证对网格形式的参数(,gamma)进行搜索,对比每一组参数的交叉验证精度,得到最优参数组合:核函数rbf,为35,gamma值为0.6,农事行为识别准确率为94.87%。
图2和图3分别为经过交叉验证后,在最优gamma参数下不同的识别准确率,以及在最优参数下不同gamma参数的识别准确率。对于模型训练的结果以及和gamma值的最佳取值可见,在最佳惩罚系数下,模型拟合效果尚佳;在最佳gamma参数范围的平均值下,支持向量较多,说明了数据集中存在类别相似的行为动作。

图2 不同C的农事行为分类准确率

图3 不同gamma参数的农事行为分类准确率
3.4 行为识别方法的有效性
为验证图像多特征在行为识别任务中的有效性,分别对图像的单个特征和多特征以及多特征中的显式特征与隐式特征融合进行行为识别。其中,人体姿态单特征表示仅利用人体姿态估计对图像进行行为识别;农具单特征表示仅利用目标检测对图像进行行为识别;人体姿态+农具显式特征表示仅利用显式特征进行行为识别;人体姿态+农具+距离特征表示利用显式特征和隐式特征中的距离空间矩阵作为总特征进行行为识别;人体姿态+农具+角度特征表示利用显式特征和隐式特征中的角度空间矩阵作为总特征进行行为识别;人体姿态+农具+距离和角度特征表示利用显式特征和隐式特征作为总特征进行行为识别。从表1可以看出,多特征比单特征表现出更好的识别能力,最终基于显式特征和隐式特征的融合特征,在农事活动数据集上表现出最好的识别效果。

表1 不同特征农事行为的分类识别准确率
为了验证EI-SVM方法的有效性,选用试验寻优参数为rbf核函数来进行验证,在rbf核函数下取不同的和gamma值分别对人体姿态单特征、农具单特征以及多特征进行模型准确度的比较。
如图4和图5所示,在利用多特征进行农事活动行为识别时,其识别准确率高于单特征的。在人体姿态单特征和农具单特征中,人体姿态单特征表现效果较好。说明人体姿态特征是农事活动行为识别的有效特征。通过这2种特征可最大化利用图像的特征,从而实现对农事活动行为的识别。

图4 相同C的农事行为不同特征的识别准确率
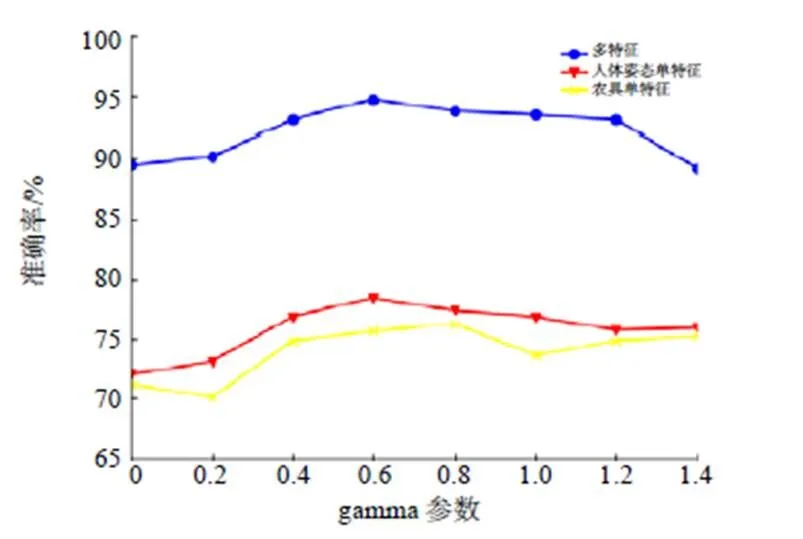
图5 相同gamma参数的农事行为不同特征的识别准确率
将EI-SVM方法对PPMI公开数据集进行行为估计,与农事行为的特征类似,每一类分为play和with 2种行为,play表示行为动作的正式状态,with表示行为动作的休息状态。经试验验证其准确率为92.39%,表明所提出的基于图像多特征进行行为识别的方法可行并有效。
[1] 赵朵朵,章坚武,郭春生,等.基于深度学习的视频行为识别方法综述[J].电信科学,2019,35(12):99-111.
ZHAO D D,ZHANG J W,GUO C S,et al.A survey of video behavior recognition based on deep learning[J]. Telecommunications Science,2019,35(12):99-111.
[2] 蔡强,邓毅彪,李海生,等.基于深度学习的人体行为识别方法综述[J].计算机科学,2020,47(4):85-93.
CAI Q,DENG Y B,LI H S,et al.Survey on human action recognition based on deep learning[J].Computer Science,2020,47(4):85-93.
[3] 李衡霞,龙陈锋,曾蒙,等.一种基于深度卷积神经网络的油菜虫害检测方法[J].湖南农业大学学报(自然科学版),2019,45(5):560-564.
LI H X,LONG C F,ZENG M,et al.A rape pest detection method based on deep convolution neural network [J].Journal of Hunan Agricultural University (Natural Sciences),2019,45(5):560-564.
[4] 张重阳,陈明,冯国富,等.基于多特征融合与机器学习的鱼类摄食行为的检测[J].湖南农业大学学报(自然科学版),2019,45(1):97-102.
ZHANG C Y,CHENG M,FENG G F,et al.Detection of fish feeding behavior based on multi feature fusion and machine learning [J].Journal of Hunan Agricultural University(Natural Sciences),2019,45(1):97-102.
[5] 邓益侬,罗健欣,金凤林.基于深度学习的人体姿态估计方法综述[J].计算机工程与应用,2019,55(19):22-42.
DENG Y N,LUO J X,JIN F L.Overview of human pose estimation methods based on deep learning[J].Computer Engineering and Applications,2019,55(19):22-42.
[6] 姜夕凯,苏松志,李绍滋,等.基于单张静态图像的人体行为识别方法综述[J].漳州师范学院学报(自然科学版),2011,24(4):23-26.
JIANG X K,SU S Z,LI S Z,et al.A survey of recognizing action from single still images[J].Journal of Zhangzhou Normal University(Natural Science),2011,24(4):23-26.
[7] 曹燕,李欢,王天宝.基于深度学习的目标检测算法研究综述[J].计算机与现代化,2020(5):63-69.
CAO Y,LI H,WANG T B.A survey of research on target detection algorithms based on deep learning[J].Computer and Modernization,2020(5):63-69.
[8] TANG Y,TIAN Y,LU J,et al.Deep progressive reinforcement learning for skeleton-based action recognition[C]//IEEE/CVF.Conference on Computer Vision and Pattern Recognition.Salt Lake City:CVPR,2018:5323-5332.
[9] CHOUTAS V,WEINZAEPFEL P,REVAUD J,et al. PoTion:pose motion representation for action recognition[C]//IEEE/CVF.Conference on Computer Vision and Pattern Recognition.Salt Lake City:CVPR,2018:7024-7033.
[10] LIU J,WANG Z,LIU H.HDS-SP:a novel descriptor for skeleton-based human action recognition[J]. Neurocomputing,2020,385:22-32.
[11] LI M,CHEN S,CHEN X,et al.Actional-Structural graph convolutional networks for skeleton-based action recognition[C]//IEEE/CVF.Computer Vision and Pattern Recognition.Vancouver:CVPR,2019:3595-3603.
[12] DING X,YANG K,CHEN W.A semantics-guided graph convolutional network for skeleton-based action recognition[C]//ICIAI.2020 the 4th International Conference on Innovation in Artificial Intelligence. Overseas Chinese University:ICIAI,2020,2138-2206.
[13] XU B,LI J,WONG Y,et al.Interact as you intend:intention-driven human-object interaction detection[C]. //IEEE/CVF.2019 IEEE Transactions on Multimedia. Vancouver:CVPR,2019:1423-1432.
[14] BOUALIA S N,ESSOUKRI BEN Amara N. Pose- based human activity recognition:a review[C]// IEEE/CVF. 2019 15th International Wireless Communica- tions & Mobile Computing Conference. Tangier,Morocco,IWCMC. 2019:1468-1475.
[15] CAO Z,HIDALGO G,SIMON T,et al,OpenPose:realtime multi-person 2d pose estimation using part affinity fields[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2018,43(5):7291-7299.
[16] REDMON J,FARHADI A.YOLOv3:An Incremental Improvement[EB/OL].arXiv e-prints,2018,128(4):68-76.
[17] CORTES C,VAPNIK V N .Support-vector networks[J]. Machine Learning,1995,20(3):273-297.
Recognition of the agricultural activities based on image feature fusion
LI Zimao1,2,YU Hui1,2,XIA Meng1,2,ZHENG Lu1,2,XU Jie1,2
(1.College of Computer Science, South-Central University for Nationalities, Wuhan, Hubei 430074, China; 2.Hubei Provincial Engineering Research Center for Intelligent Management of Manufacturing Enterprises, Wuhan, Hubei 430074, China)
Aiming at the behavior information implied by human posture in agricultural activity images and the association information implied by human and agricultural tools, a recognition method of agricultural activity behavior based on image feature fusion is proposed. Human posture estimation technology OpenPose is used to extract the joint position information of agricultural behavior, and target detection YOLOv3 is used to extract the position and classification information of agricultural tools in agricultural behavior. These information is used to construct the distance space feature matrix and angle space feature matrix of agricultural behavior, to fuse the above image features. Based on explicit and implicit features, the recognition method EI-SVM was establish to realize the recognition of agricultural activity behavior. The experimental results show that the accuracy of EI-SVM method for agricultural activity behavior recognition is 94.87%, and the accuracy on public data set is 92.39%.
agricultural activities; body posture; behavior identification; target detection; image feature fusion
TP391
A
1007-1032(2021)05-0603-06
李子茂,余慧,夏梦,郑禄,徐杰.基于图像特征融合的农事活动行为的识别[J].湖南农业大学学报(自然科学版),2021,47(5):603-608.
LI Z M,YU H,XIA M,ZHENG L,XU J.Recognition of the agricultural activities based on image feature fusion[J].Journal of Hunan Agricultural University(Natural Sciences),2021,47(5):603-608.
http://xb.hunau.edu.cn

2020–11–01
2021–08–26
湖北省科学技术厅创新专项(2019ABA101)
李子茂(1974—),男,山东临清人,博士,教授,主要从事算法设计与分析和计算复杂性研究,lizm@mail.scuec.edu.cn
责任编辑:罗慧敏
英文编辑:吴志立
猜你喜欢
沈阳航空航天大学学报(2022年3期)2022-11-08
今日农业(2022年15期)2022-09-20
今日农业(2022年1期)2022-06-01
今日农业(2022年4期)2022-06-01
军事文摘(2020年20期)2020-11-16
军事文摘(2020年18期)2020-10-27
计算机系统应用(2020年6期)2020-06-20
小学教学研究(2018年6期)2018-09-04
廉政瞭望(2015年21期)2015-12-23
学生天地·初中(2014年12期)2015-01-17
