
高寒环境下的智能网联汽车试验场研究
2021-11-03 11:10曾繁鑫,曾文波,关乔,吴传洋,孙建忠
汽车科技 2021年5期
关键词:场景设计
曾繁鑫,曾文波,关乔,吴传洋,孙建忠
摘 要:随着汽车智能驾驶技术的快速发展,为了建立完整的智能驾驶技术验证体系,国内外的智能网联汽车试验场遍地开花,极大地丰富了智能驾驶测试场景库,但高寒环境下的智能驾驶成为技术发展的瓶颈。本文主要介绍了三种不同类型的智能网联汽车试验场的特点,分析了高寒环境对智能驾驶汽车的影响,阐述了建设高寒环境智能网联汽车试验场的必要性,最后通过将环境和场景设计相结合的例子,为高寒环境下的智能驾驶技术研究提供一种可行的思路。
关键词:智能网联试验场;高寒环境;场景设计
中图分类号:U467.5 文献标识码:A 文章编号:1005-2550(2021)05-0100-06
Research on Intelligent Connected Vehicle Proving Ground
in Paramos
ZENG Fan-xin, ZENG Wen-bo, GUAN Qiao, WU Chuan-yang, SUN Jian-zhong
(GAC Automotive Research & Development Center,GuangZhou 511434,China)
Abstract: With the rapid development of automobile intelligent driving technology, in order to establish a complete intelligent driving technology verification system, domestic and foreign intelligent connected vehicle proving ground are established everywhere, which greatly enriched the intelligent driving test scene library. However, intelligent driving in paramos has become a difficult point for technological development. This article mainly introduces the characteristics of three different types of intelligent connected vehicle proving ground, analyzed the impact of paramos on intelligent vehicle. Explains the necessity of building an intelligent connected vehicle proving ground in paramos. Finally, through the example of combining environment and scene design, it provides a feasible idea for the research of intelligent driving technology in paramos.
Key Words: Intelligent Connected Vehicle Proving Ground; Paramos; Scene Design
當前,全球汽车产业发展正面临深刻的变化,智能化、电动化、网联化、共享化成为汽车产业新的战略制高点,智能驾驶技术已成为全球汽车产业竞争的重点领域[1]。我国也在积极提升智能网联汽车的开发和验证能力,不断出台与之相关的政策法规推进行业的持续健康发展[2]。
我国智能网联汽车试验场在各地开花,且分布呈现出显著的地域特性,如图1所示。我国南方地区拥有发展成熟的汽车产业及实力强劲的汽车研发机构、高校等,站在我国智能驾驶技术发展的前沿,因此我国的智能网联汽车试验场也大多数分布在南方地区。我国北方地区因自然条件的限制以及智能驾驶系统在低温条件下的局限性,高寒环境地区仅长春拥有一个智能网联汽车应用(北方)示范区,冰雪特色环境智能网联汽车试验场资源严重不足。为了促进我国智能驾驶技术的发展,丰富智能驾驶试验测试场景库,突破智能驾驶在低温环境下正向开发和测试验证的技术瓶颈,迫切需要建立高寒环境智能网联试验场为智能驾驶技术提供孵化平台。
1 国内典型的智能网联汽车试验场
智能网联汽车试验场主要分为三类:①传统汽车试验场改造:传统汽车试验场场内的基础设施完善,可直接使用现有的跑道进行车辆高速项目测试,但缺点是由于场地内的道路、设施等固定,场景可塑性不高。因此可设计的场景种类数较少,场景较为单一,且对传统试验场改造工程量较为复杂。典型代表为:长安大学车联网与智能汽车试验场[3]。②现有实际道路改造:利用城郊的公共道路布置智能网联测试设备,如路侧单元、边缘计算单元等进行车端-路端-云端交互,可实现车路协同、编队行驶等大型测试项目。缺点是场景单一,扩展性低,同时公共道路管理成本较高、试验安全风险较大。典型代表为:北京房山5G自动驾驶车辆测试道路[4]。③新建智能网联示范区:场区内经过前期专业的规划与研究,大类场景齐全,小类场景丰富,应用最新的5G-V2X技术,可实现高阶智能驾驶测试。但由于封闭示范区面积有限,只能构建微缩场景,导致可测试车容量较小。主要侧重于智能驾驶功能验证,对于具有高速要求的测试项目无法实施。典型代表为:国家智能网联汽车应用(北方)示范区[5]。
2 高寒环境智能网联汽车试验场建设的必要性
我国北方地区属于温带季风气候,冬季寒冷漫长,得天独厚的环境使之成为了天然的汽车寒区试验场[6]。以我国汽车寒区试验的两大集中地区呼伦贝尔和黑河为例,全年5~6个月气温处于零度以下,如图2和图3所示。极端的低温气候常伴有大雪、冰雹、狂风等天气,高纬度的地理条件使日照时间短、太阳辐射弱,导致路面长期存在结冰、积雪或残雪覆盖等情况。而恰恰是这些自然环境对智能网联汽车的行驶安全提出了严苛的挑战,同时也成为智能网联汽车技术发展、硬件升级和车型量产急待突破的技术瓶颈。以下从冰雪、低温、低附这三个与智能驾驶影响相关性最强的因素出发,分析北方冬季高寒环境对智能驾驶的影响。
2.1 冰雪天气对智能驾驶的影响
扬雪和积雪天气会对智能驾驶汽车的识别能力造成干扰:①对摄像头的视觉识别能力产生不良影响;②激光雷达由于自身的反射特性,在大雪中容易对前方目标物的速度和距离作出错误判断;③道路路沿或道路中央有积雪或冰棱时,经过阳光反射后被误识别为车道线,可能导致车辆横向控制不稳,造成安全隐患;④交通设施如红绿灯、路侧标识牌被雪覆盖时,将会影响智能驾驶汽车在城区的通行能力;⑤车辆雷达和摄像头表面被冰雪覆盖时,智驾功能被抑制甚至失效等[7]。
2.2 低附路面对智能驾驶的影响
冰雪会降低路面的附着系数,导致轮胎附着力降低,对制动性能有较大影响。传统的计算汽车制动距离的方法如公式(1)和公式(2)所示:
(1)
(2)
式(1)和(2)中:S为制动距离;v0为汽车初速度;t为制动传动迟滞时间;t'为制动器摩擦力增长时间;α为最大制动减速度,制动减速度受到路面附着系数的约束;μ为路面附着系数;g为重力加速度。
由制动距离公式可以看出:路面附着系数越小,汽车的最大减速度越小,制动距离越大,这为紧急制动系统(AEB)控制策略的设计提供了启示,可采取控制系统提前介入时间,以及增大制动力的方法,来应对突发状况。此外,低附路面还会影响车辆的横向控制能力,严重时发生跑偏甚至甩尾。
2.3 低温环境对智能驾驶的影响
低温环境影响着智能驾驶的环境感知、决策规划以及执行控制的全过程,影响因素分解如图7所示。
超声波的传播速度与温度的关系如公式(3)所示[8],超声波的速度随着温度降低而降低,导致超声波探测距离不准确。
c=c0+0.607?T (3)
式(3)中:c0为0℃时的声波速度:331.5 m/s;T为实际温度(℃)。
随着智能驾驶技术不断往更高阶段发展,打破地域和环境的使用局限性是必不可少的一步,建设高寒环境下的智能网联汽车试验场,有助于建立高寒环境下的智能驾驶开发验证体系,形成标准的测试规程。同时也极大地丰富了智能驾驶测试场景库,提升智能驾驶的虚拟仿真能力。
3 高寒环境智能驾驶测试场景研究
3.1 技术指南和法规
2018年5月,交通运输办公厅为指导自动驾驶封闭测试场地建设,推动自动驾驶测试工作,促进智能自动技术发展,制定了《自动驾驶封闭测试场地建设技术指南(暂行)》,指南对场地、通信、供电及其他基本要求作出了规定[9]。在场景设计方面,2018年4月,工信部、公安部、交通运输部颁布了《智能网联汽车道路测试管理规范(试行)》,文件规范了智能驾驶功能的检测项目,包含14个测试项目、34个测试场景,其中必测项目9个,测试场景20个;选测项目5个,测试场景14个[10]。此外,北京、长沙、重庆等也出台了地方性的测试规程,为智能驾驶测试技术提供了更多的测试场景和项目指导。
3.2 高寒环境下智能网联汽车试验场建设特点
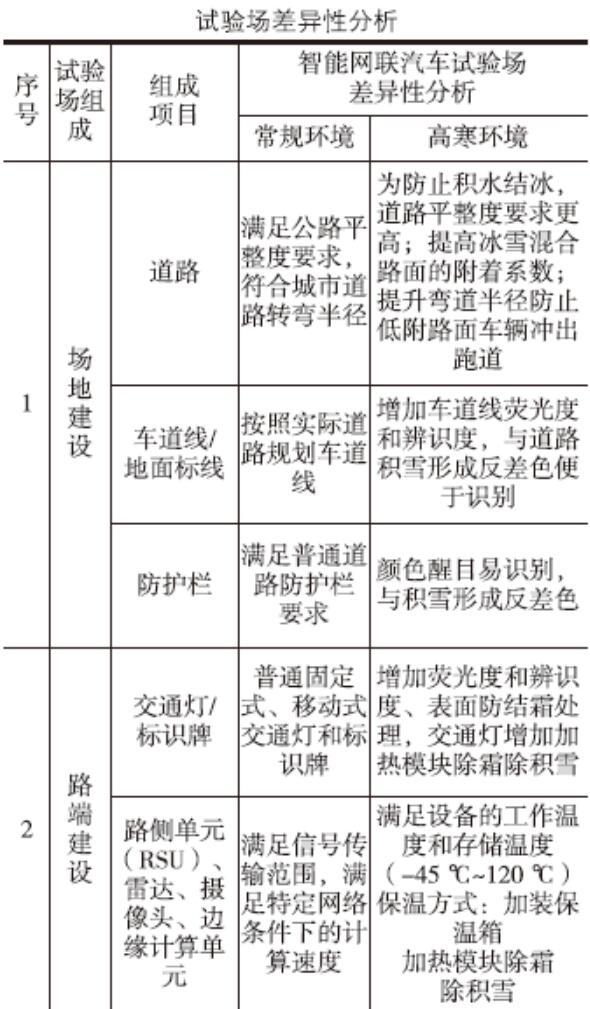
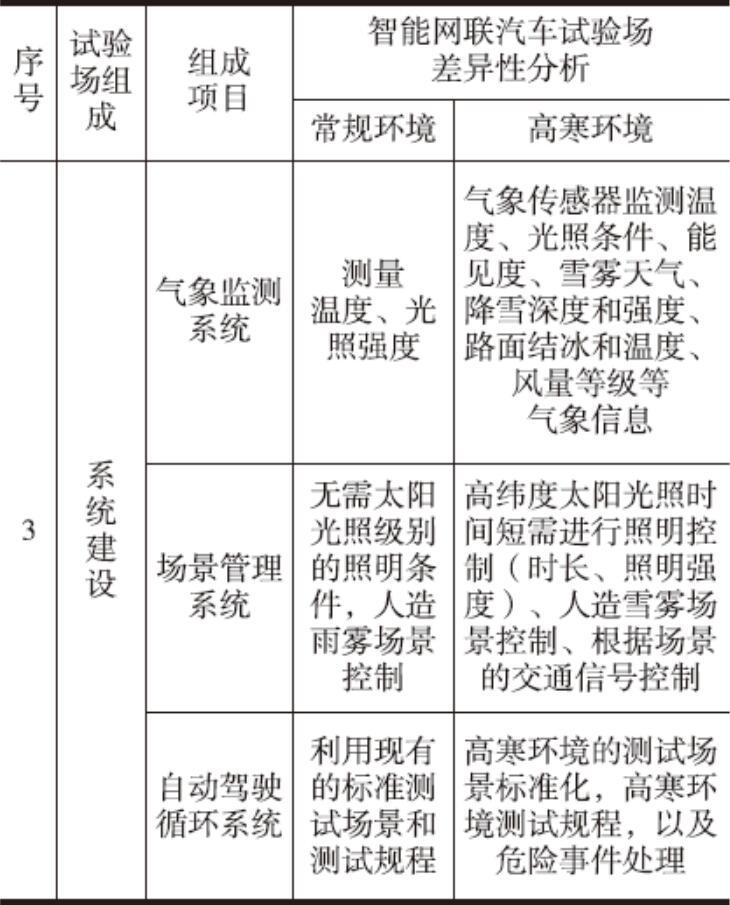
一个功能齐全、场景丰富的智能网联汽车试验场主要由三个部分组成:场地建设、路端建设以及系统建设。高寒环境下的智能网联汽车试验场由于其所处的特殊地理位置和氣候环境,在建设时应着重突出其特色,围绕高寒环境进行场景设计,因此与常规智能网联汽车试验场存在较大的差别。以下从场地建设、路端建设以及系统建设三个方面对常规环境和高寒环境智能网联汽车试验场作差异性分析,见表2:
3.3 高寒环境智能驾驶典型测试场景——十字交叉路口
高寒地区的智能驾驶典型测试场景的类型、功能和技术指标,应根据北方冬季的气象、道路条件来设计,突出高寒环境下冰雪、低附、低温的典型特点。道路、公共设施、设备、交通参与者等要素的不同组合可以扩展出多种多样的测试场景,以满足不同智能驾驶功能的测试需求。
十字交叉路口测试场景是交通流中最复杂、也是最典型的大场景之一[11]。根据“三部委”规定的智能驾驶检测项目要求,在十字交叉路口有以下4个典型场景:方向指示信号灯识别及响应、直行车辆冲突通行、右转车辆冲突通行、左转车辆冲突通行。结合高寒环境特征,对十字交叉路口场景赋予更多的环境变量,测试智能驾驶汽车在高寒环境场景下的性能表现,详细场景信息见表3。
表3以十字交叉路口大场景为例,根据不同的交通参与元素,列举了4个典型的智能驾驶测试场景,结合高寒环境典型的冰雪、低附、低温气候特征,测试智能驾驶汽车在极端环境下对目标识别准确性的能力、系统ECU的数据处理和反应能力、以及执行机构对介入时机的把控能力。高寒环境下其他的智能驾驶测试场景库可按照此思路扩展研究。
4 结论
汽车行业作为国家支柱型产业,正在经历一场革命性的产业升级,智能驾驶代表着人类未来的出行方式,已被全球汽车厂商列为发展的战略方向。我国政府积极营造良好发展环境,推动智能驾驶技术往更普及、更先进、更安全、更可靠的方向發展,智能驾驶汽车的常规测试技术在政府、行业组织等力量的推动下进行着持续的探索和进步。本文阐述了三种不同类型智能网联汽车试验场的特点,同时分析了高寒环境对智能驾驶的影响,强调了建设高寒环境智能网联汽车试验场的必要性。我国应利用好北方地区低温冰雪气候的天然优势,对高寒环境智能驾驶技术的开发和测试进行深入探索研究,填补我国在高寒环境智能驾驶汽车研发测试领域的空白,最后通过环境和场景设计相结合的例子,为高寒环境下的智能驾驶技术研究提供一种可行的思路。
参考文献:
[1]戴一凡,李克强.智能网联汽车发展现状与趋势分析[J].汽车制造业,2015.
[2]祝月艳,赵琳.国内智能网联汽车测试示范区发展现状分析及建议[J].汽车工业研究,2018(11):36-43.
[3]王润民,张心睿,王由道,等.自动驾驶封闭测试场地建设技术研究与实践[J].汽车实用技术,2020(4):33-36.
[4]吕萌.国内首条5G自动驾驶开放道路测试正式试运行[J].通信世界,2018,No.784(26):16-16.
[5]张春林.智能网联汽车北方示范区建设实践和问题[J].智能网联汽车,2019,000(001):51-51.
[6]孙建忠,吴传洋,李泽艺,等.汽车寒区试验场道路制作技术工艺研究[J].环境技术,2019,037(005):69-73.
[7]杜瑞.基于雷达系统的路面目标识别关键技术研究[D].西北工业大学,2018.
[8]孙钟,刁海波,李全育,等.温度对超声检测声波速度影响的研究[C].中国海洋工程学术讨论会.2011.
[9]陈桂华,于胜波,李乔,等.中国智能网联汽车测试示范区发展调查研究[J].汽车工程学报,2020(2).
[10]杜宏建,吴慧敏,朱用国,等.智能联网封闭试验区试验平台设计与实现[J]. 汽车科技,2020(5):48-52.
[11]陈永尚.智能汽车城区复杂交通情景的驾驶行为决策方法研究[D].吉林大学,2019.
猜你喜欢
创意设计源(2017年1期)2017-03-10
求知导刊(2016年33期)2017-01-20
东方教育(2016年14期)2017-01-16
青春岁月(2016年20期)2016-12-21
文艺生活·下旬刊(2016年11期)2016-12-12
中国市场(2016年32期)2016-12-06
北方文学·中旬(2016年5期)2016-06-30
北方文学·中旬(2016年5期)2016-06-30
戏剧之家(2016年2期)2016-03-03
戏剧之家(2016年1期)2016-02-25
