果树自动喷药车设计
2021-11-03 09:23:52西安工业大学机电工程学院邵林鹏李嘉玲万宏强赵汉青
电子世界 2021年18期
西安工业大学机电工程学院 邵林鹏 李嘉玲 万宏强 赵汉青
许多果园还是人工背着打药机对果树进行喷雾防治,其效率低下,在消耗大量劳动力的同时也会危害人的身体健康。本文提出了一款可以在小果园使用、能装在中小装载设备上,并且有一定适应能力,可以对不同的果树进行喷雾的喷药装置。该设备能根据树高选择喷药工作模式,通过控制器控制调整水平和竖直电机转动调整到所需模式,启动柱塞泵实现喷药。该设备增加了果树喷药的安全性、提高了喷药效率。
随着人们生活水平的提高,民众对水果的需求日益增加,这种需求使得果树种植面积和产量得到了大幅提高;但目前果树喷药装置自动化程度并不高且效率低下,因此,国内外学者针对自动喷药设备进行了一系列研究。周良富等研制出一款果园风送式喷雾机,整体结构为门式结构,对靶装置由步进电机和垂直直线推杆配合直线轨道组成,但是需要工作人员进行人工对靶。尽管这款喷雾装置可以对两边果树进行全方位喷药,喷药效率得到提高,但是目前还未能够做到自动对靶。市面上的喷雾设备工作性能可靠,只针对特定的果园环境可以达到较好的喷药效果,但是由于缺少自动对靶装置,造成了本身自适应能力不足,不能精确识别不同品种果树的生长状况。姜红花等在某款风送式喷雾机中首次使用物联网技术,利用红外线传感器对果树进行对靶定位,整个系统采用的是开环控制原理,缺少了对定位信息检测的反馈,因此定位不够精准。综上所述,虽然目前在果园喷雾机方面的研究取得一定进展,尤其是在精准对靶、无人机自动喷药技术应用领域的研究已十分成熟,但机械结构缺乏创新和智能化程度不高、效率不高、性价比低等一系列问题,依然限制了果园喷雾机的普及。
1 总体设计
根据该喷药装置的设计要求可以推导出其工作原理,首先喷药装置上的传感器感应到果树冠层,然后把所得数据传给控制系统,经过处理之后再由控制系统控制电机和电磁阀的启动,以控制喷杆和喷头工作,实现对果树的喷药。喷雾机工作原理如图1所示。

图1 自动喷雾机原理图
整个装置以空心梁构建框架,将药箱置于中间,前部搭载三缸柱塞泵以及相应的驱动电机,车体尾部通过支撑架搭载喷杆调节装置。喷杆调节装置主要由水平滚珠丝杠滑台和垂直滚珠丝杠滑台以及收线轮组成。当工作人员操控喷药装置进入果园后,可以根据果树的冠层大小和高低选择不同的工作模式。水平滚珠丝杆滑台主要调整喷杆距两侧果树的距离,以适应不同株距的果树。垂直滚珠丝杆滑台则主要调整喷杆的高度,由电机驱动的收线轮则用来调整喷杆的倾斜角度。当果树植株较矮时,由收线轮将喷杆放平,即为对地喷药模式。根据果树的高矮和冠层大小以及株距,可以适当调整喷杆的高度和角度,使其转为45°喷药模式和垂直喷药模式。整个车体本身并不具备动力,喷药装置可以搭载在小型牵引设备上,并且整个装置可以由车载电源提供动力来驱动电机。图2为喷雾机的结构图。

图2 喷雾机结构图
2 各装置设计
2.1 喷药模式变换机构设计
为了提高该喷药装置对不同果树的适应能力,设计出了三种工作模式,即上章所提到的垂直喷药模式、45°喷药模式以及对地喷药模式。喷药模式变换机构主要由收线轮、固定铰链组成,类似于吊桥的原理,通过收线轮的收放绳索来控制喷杆绕固定铰链的旋转角度,若喷杆与垂直丝杆平行即为垂直喷药模式,喷杆与垂直丝杆呈45°夹角即为45°喷药模式,喷杆与垂直丝杆垂直即为对地喷药模式。图3为模式变换机构图。
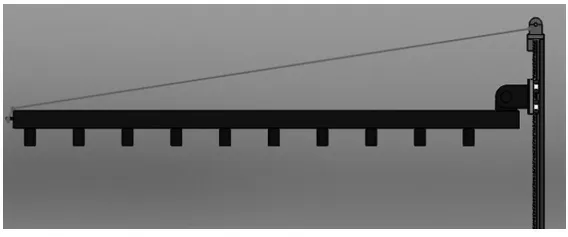
图3 模式变换机构
2.2 喷杆水平与垂直传动机构设计
该双向多方位自动喷药装置的水平、垂直移动都是通过滚珠丝杆滑台来实现的,丝杠滑台都是由相应的步进电机来驱动。因为两棵相邻的果树在其冠层交接处最窄,所以喷杆距离这一点最远,故此需要更高的速度来接近,则水平丝杠滑台速度设为v1=80mm/s,而由于相同的果树植株高矮基本相同,所以垂直丝杠滑台的移动速度可以不用太快,故将其速度设为v2=20mm/s。图4所示为水平与垂直传动系统图。
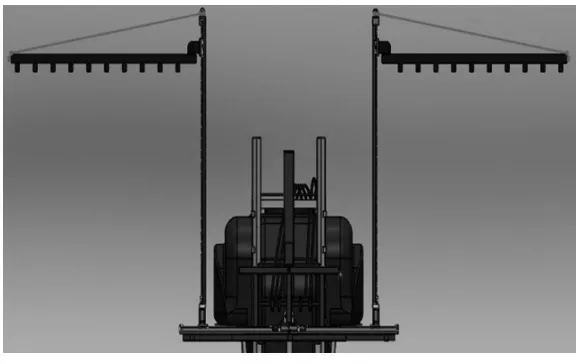
图4 水平与垂直移动机构图
2.3 喷杆设计
该喷杆采用一条完整的无缝钢管制作而成,其上共设有八个喷头,每个喷头都相距0.2m,这种设计可以使每个喷头在一定区域喷洒有重叠,保证对果树的喷雾效果,对于不同的果树,还可以根据其果树冠层大小来改变喷杆长度和喷头数量。喷杆的设计示意图如图5所示。
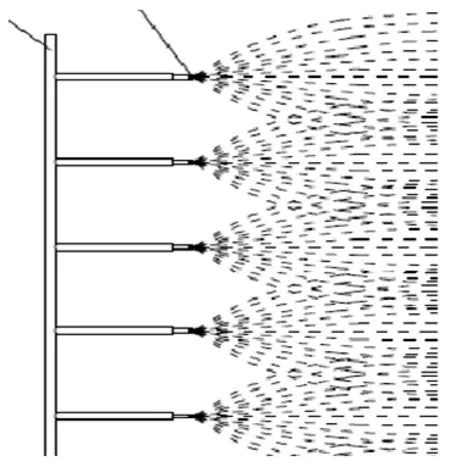
图5 喷杆设计图
2.4 输液机构设计


式(1)中,Ag为高压防爆管的内孔截面积。
结论:本装置能够适应小果园机械作业要求,实现喷药治理病虫害,设计合理、原理简单、使用便捷,可以减少农药的使用,既节省成本又保护环境。工作效率高效,实现了高效、经济、节能、环保的要求。
猜你喜欢
农业装备与车辆工程(2022年5期)2022-10-31 08:40:08
汽车实用技术(2022年15期)2022-08-19 02:48:04
中国农机化学报(2022年8期)2022-08-12 02:29:10
新作文·高中版(2022年10期)2022-05-30 10:48:04
农业机械学报(2022年2期)2022-03-14 07:57:20
佳木斯大学学报(自然科学版)(2021年6期)2021-12-21 00:35:08
橡塑技术与装备(2021年13期)2021-07-16 05:29:32
橡塑技术与装备(2021年9期)2021-05-12 11:28:20
农业知识(2018年45期)2018-01-17 16:55:10
机械工程师(2015年7期)2015-02-18 12:01:18