多路Buck变换器并联均流技术的特性分析
2021-11-03 13:49:42李玉彤姜锐函徐红梅
延边大学学报(自然科学版) 2021年3期
李玉彤, 姜锐函, 徐红梅
( 延边大学 工学院, 吉林 延吉 133002 )
0 引言
由于并联电源系统具有容量大、效率和可靠性高、成本低等优点,因此其被广泛应用于各种大功率负载系统中.目前,分布式电源并联供电系统已逐步取代单模块供电系统,该系统不仅可避免供电系统在高功率、大电流输出时对电子元件所产生的影响,同时还可解决直接并联开关变换器体积过大、成本较高等问题[1].但由于分布式电源并联供电系统中的开关电源模块并联时其特性和参数会受到生产工艺和系统误差的影响[2],因此会使得各模块的输出特性发生变化,并产生高输出电压模块为低输出电压模块供电的现象[3],进而影响系统的稳定性.
目前控制并联Buck变换器的常用方法主要有下垂法、自主均流法、主从均流法[5].其中,主从并联均流技术因可使电路具有良好的动态响应能力和能够避免模块电流过大而导致的电路损耗而受到学者的广泛关注[6].目前,对并联Buck变换器均流效果的研究大多是以两路并联进行的[7],而对于三路及多路Buck变换器并联的均流效果研究得较少[8];为此,本文对由双闭环控制的Buck变换器的稳定性进行研究,并利用Matlab/Simulink建立的仿真模型分析了两路、三路并联Buck变换器双闭环控制系统的均流效果.
1 Buck变换器的数学模型
Buck变换器的工作原理如图1所示.图1中Vg、VD、Vbe分别为输出电压、二极管、开关管, C、L、R分别为电容、电感及负载电阻.Buck变换器的工作方式为:在区间[0,t1]内,当导通开关管Vbe时,输入电压Vg通过开关管Vbe流到二极管VD两端,此时二极管VD截止;当电流流过电感L时,由于电容C保持不变,因此此时电感L两端的电压为正向电压,且此时电感电流iL在到达t1时刻前线性增加到最大值.
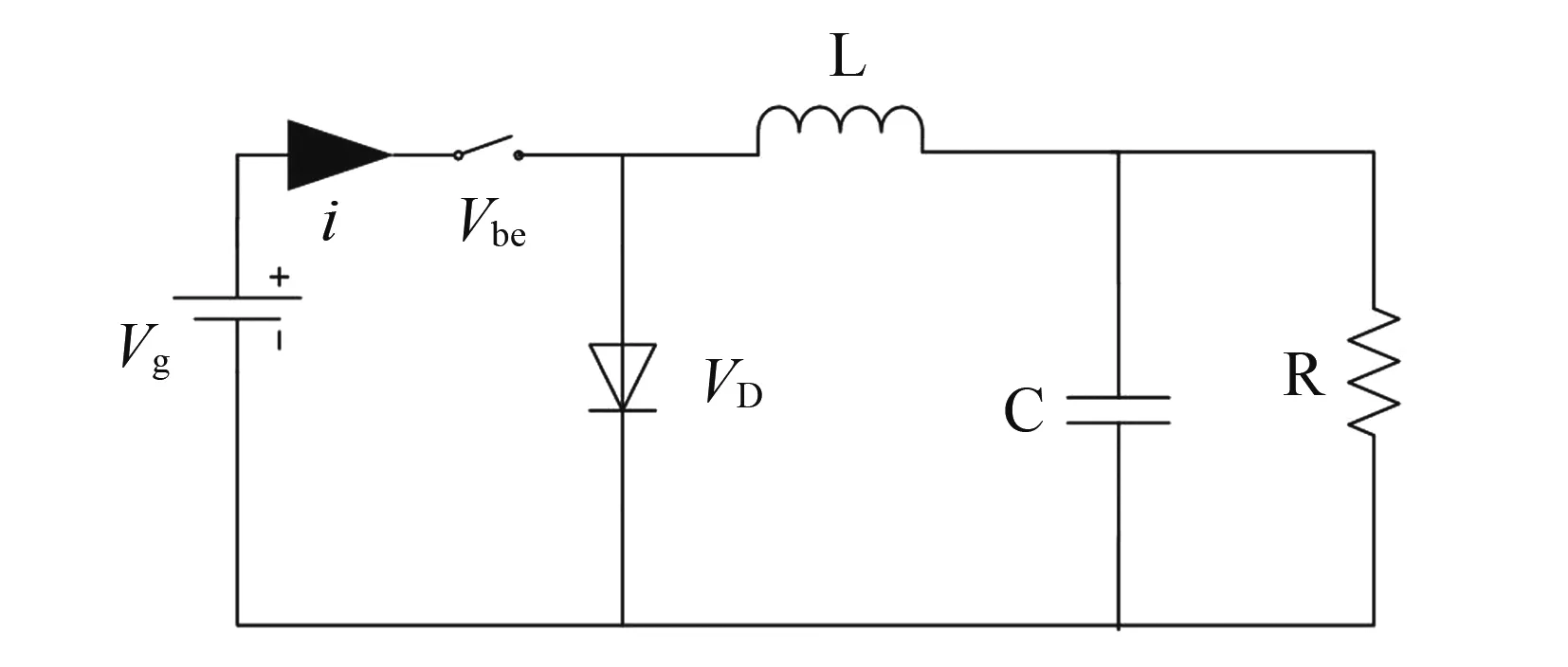
图1 Buck变换器的工作原理图
在 [0,t1]区间内,iL的增量可表示为:
(1)
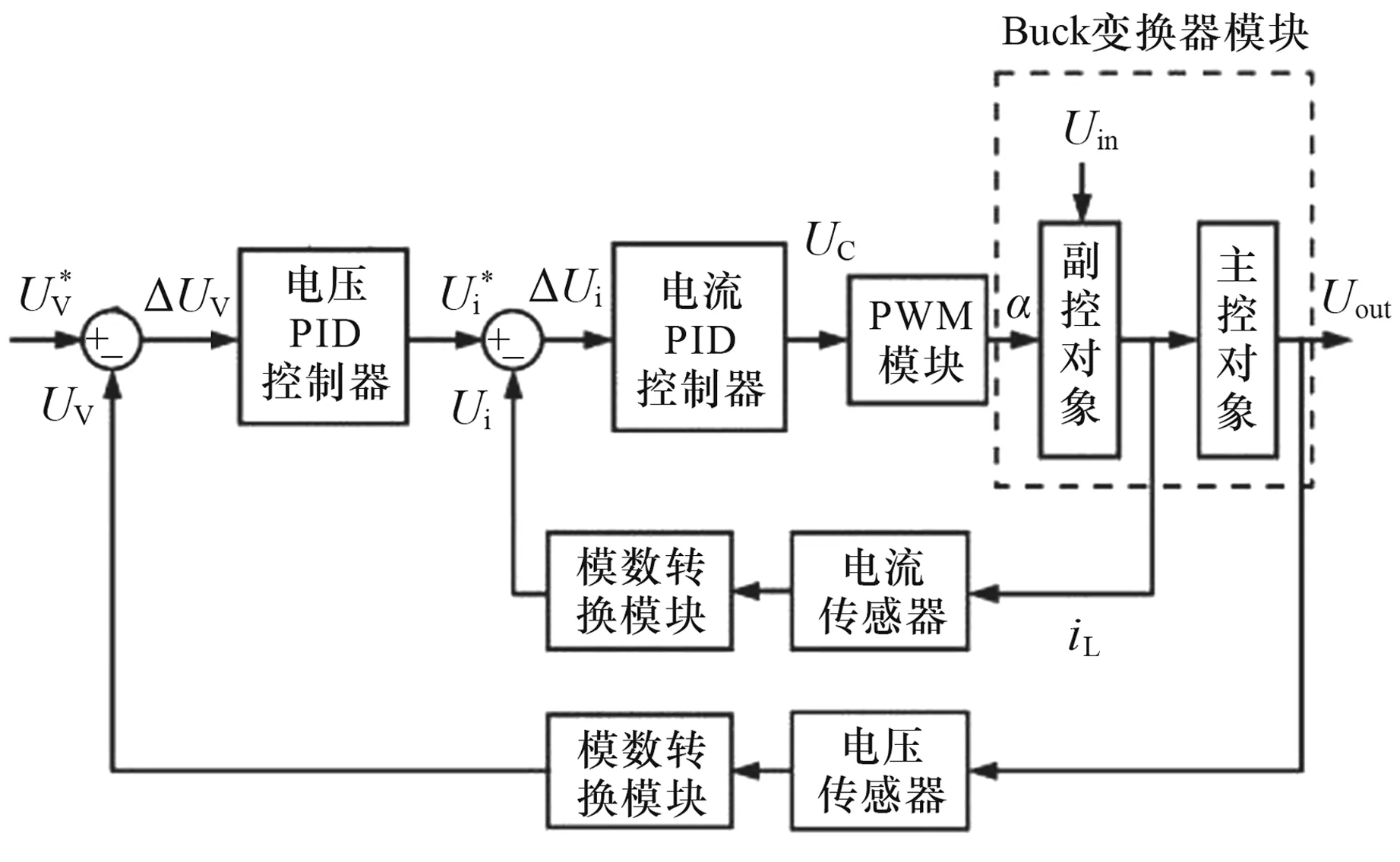
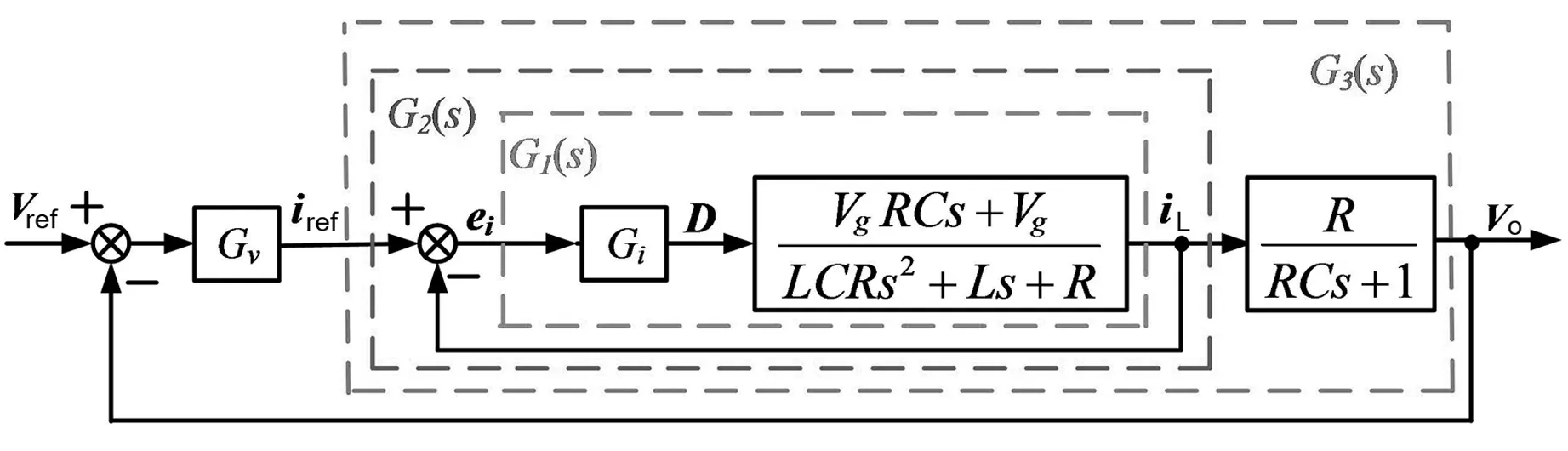
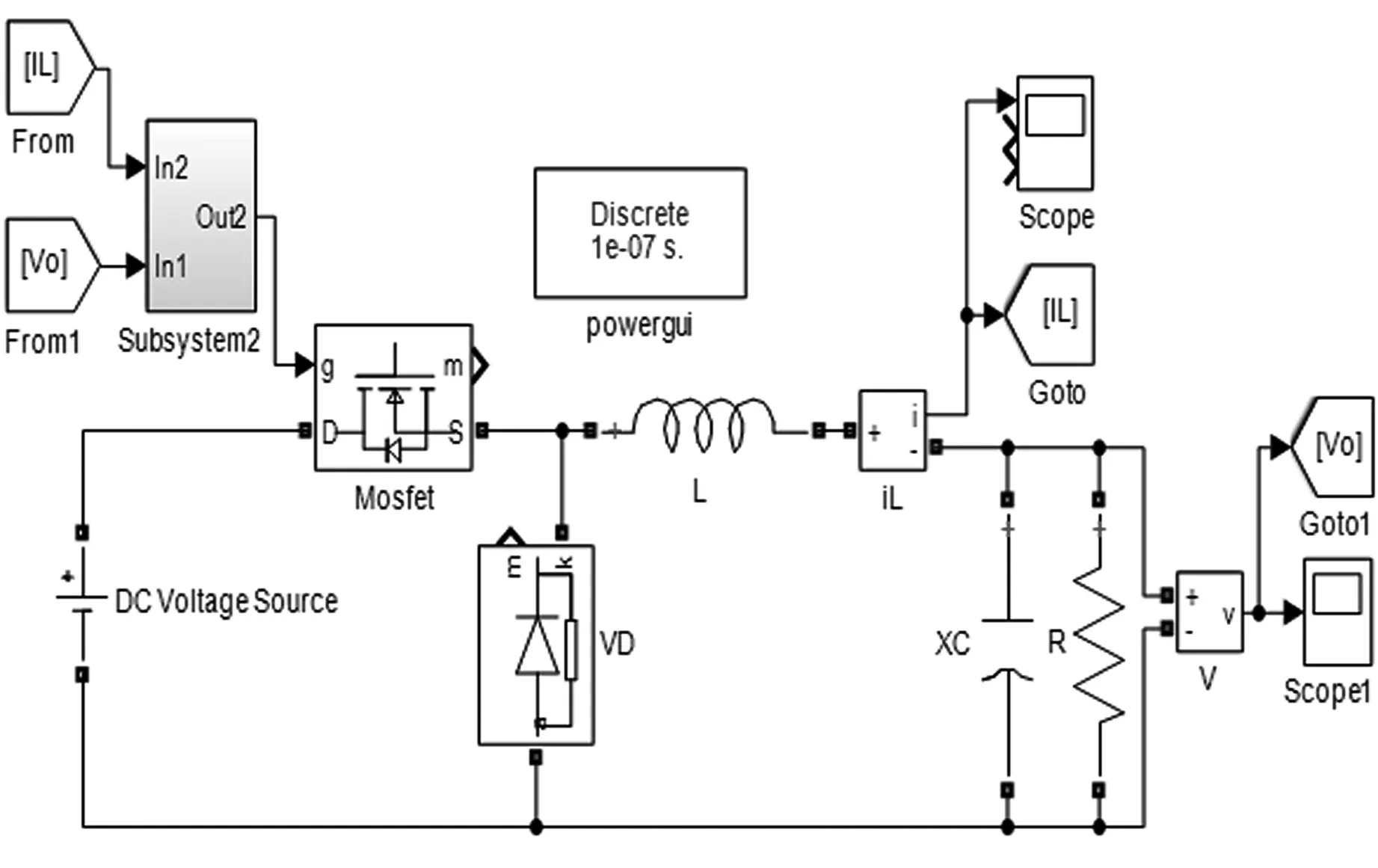
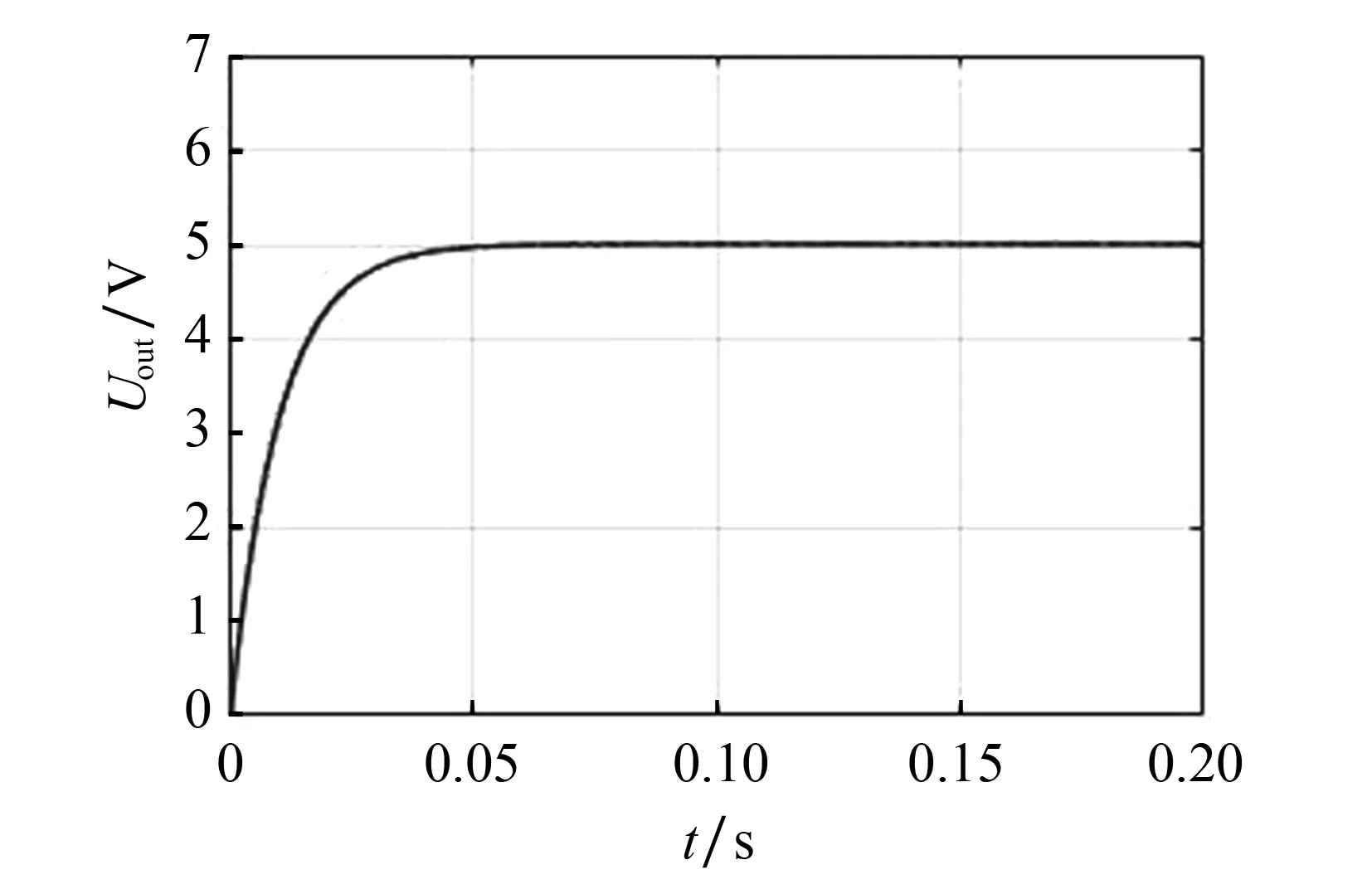
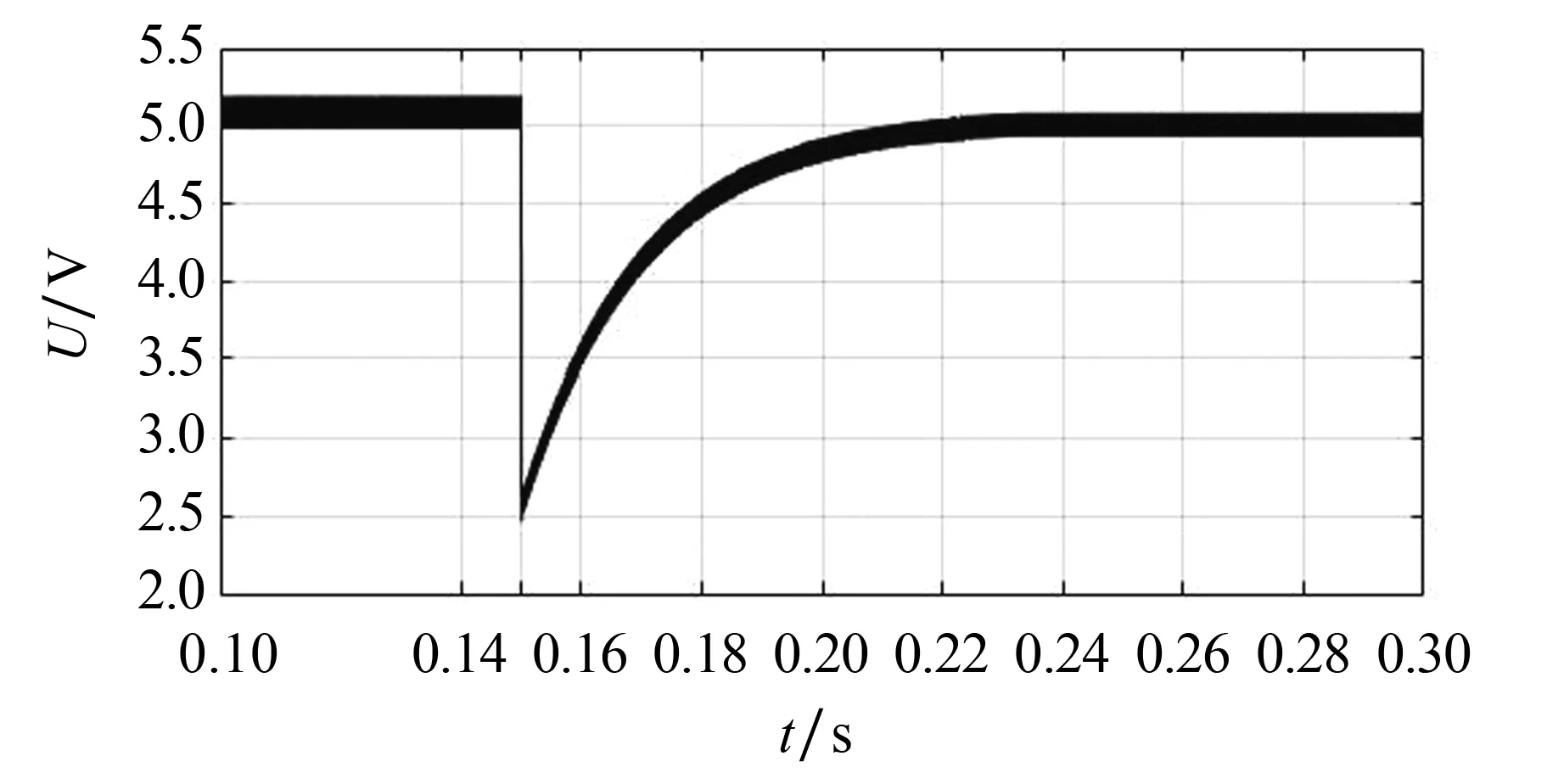
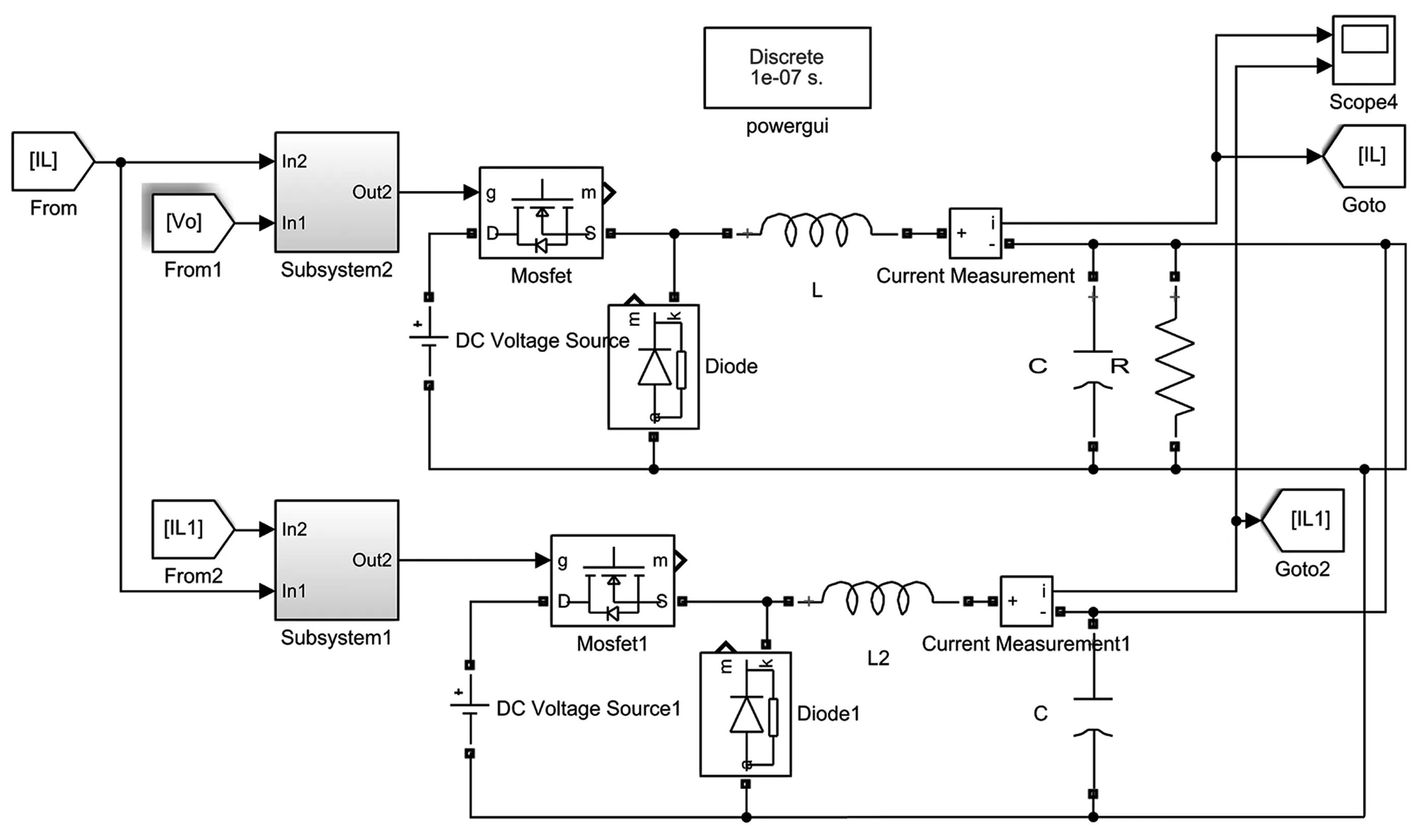
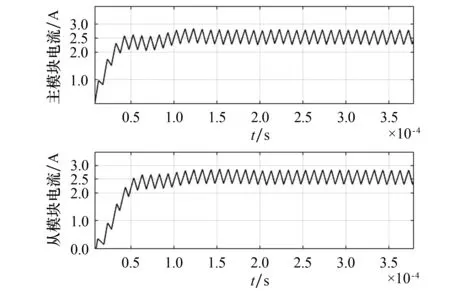
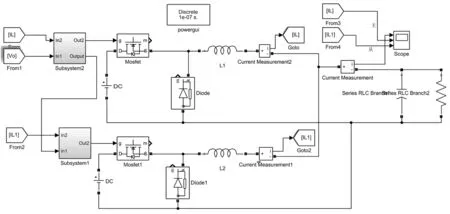
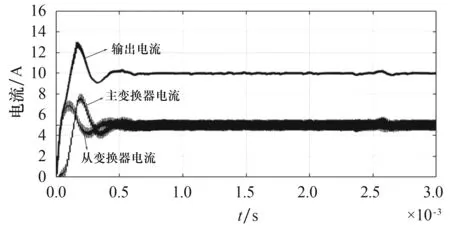
式(1)中:T为开关周期,T=fs;D为占空比,D=t1/T(0 在 [t0,t1]区间内,开关管Vbe关断,二极管VD续流,电感L两端电压UL=-Uout, 电流iL为负向(直到T时刻瞬间到最小值).在该区间内,iL的减小量为: (2) 在稳态工作下iL的波形因呈周期性重复,因此ΔiL(+)=ΔiL(-), 即: (3) 其中M为电压增益.由公式(3)可知,电压增益M由占空比D决定. 双闭环系统是由内环(以电流作为反馈信号)和外环(以电压作为反馈信号)组成的反馈控制系统.由于并联的Buck变换器系统具有内环均流、外环追踪电压误差的能力[9],因此其比单闭环控制系统能够得到更多的反馈信息,即比单闭环控制系统具有更好的控制效果. 双闭环的控制系统如图2所示.该系统中,负载电压为主控对象,它在电压传感器和模数转换模块的共同作用下将电压值和参考电压值的差值输入到电压PID控制器中[10].电感电流为副控对象,它通过电流传感器进入到模数转换模块,并与电流参考值做差.电压环的PID和电流环的PID根据做差得到的差值调节输入的电流后,将最终得到的电流值输入到PWM模块,由此形成双闭环控制. 图2 双闭环的PID控制系统 利用状态空间法推导双闭环控制的传递函数如图3所示.图3中,G1为电流环PI控制器的传递函数,G2为去除电感电流误差的传递函数,G3为双闭环控制的传递函数. 图3 双闭环控制的传递函数 为验证双闭环控制的可行性,利用Matlab对Buck电路进行仿真分析.由于系统采用的是离散方式运行,因此本文采用双线性变换设计法对并联Buck变换器进行变换处理.经过补偿网络设计与仿真调节,得到了系统的电流补偿网络Gid(S)和电压补偿网络Gvd(S): (4) (5) 在开关1(s1)和开关2(s2)均为闭合时,并联Buck变换器的状态方程可表示为: (6) 在s1闭合、 s2关断时,并联Buck变换器的状态方程可表示为: (7) 在s1关断、 s2闭合时,并联Buck变换器的状态方程可表示为: (8) 式中:E为输入电压;X为变化向量,其计算公式为 (9) 双并联Buck变换器的As和Bs可表示为: A1=A2=A3=A4= 主从均流法的主要特点是在并联系统中当外设特性不一致时其仍具备较好的控制效果.主从均流法的基本原理是在多个电源模块中,人为地规定一个主模块(Master),并将其余模块规定为从模块(Slaves),同时将主模块的电流值作为其他模块的参考值.主从均流法的控制框图如图4所示. 图4 主从均流法的控制框图 为验证Buck变换器的双闭环控制效果,采用Matlab/Simulink进行建模仿真.图5为双闭环控制下的Buck电路的Matlab仿真模型.仿真参数为:Vg=10 V,L=0.08 H,C=470 μF,D=0.5,R=10 Ω. 图5 双闭环控制的Buck电路模型 仿真时间为0~0.2 s的仿真结果如图6所示,图7为仿真时间在0.04~0.075 s时的放大图.由图7可知,当输入电压为10 V时,输出电压稳定在4.95~5.05 V范围内.由此可知,当系统稳定后,输出电压的误差仅为0.05 V. 图6 输出电压的仿真结果 图7 部分输出电压的仿真放大图 图8为t=0.15 s时的电阻突变仿真图(电阻由10 Ω突变为20 Ω).由图8可以看出,电阻突变后输出的输出电压值虽发生了改变,但是在t=0.2 s时电压恢复到了5.0 V左右,并随后保持稳定.该结果表明,双闭环控制能够稳定由电阻突变所引起的电压变化. 图8 t=0.15 s时电阻突变的仿真结果 图9为主从均流法的两路并联Buck变换器的仿真模型.在该模型中,去除了从机的负载电阻和电压环控制,保留了主机的电压环控制,并将主机的电感电流的输出作为从机电流环的参考值,其中L1=0.08 H,L2=0.05 H. 图9 主从均流法的两路并联Buck变换器的仿真模型 主从均流法的两路并联Buck变换器的仿真结果如图10所示.由图10可知,当输入电压保持一致时,两路并联Buck变换器的电感值虽有差异,但在每条支路上均可实现2.5 A的输出. 为进一步验证主从均流法的两路并联Buck变换器的稳定性,本文将图5中的R1由10 Ω突变为15 Ω(t=2.0 s),其仿真结果见图11.由图可以看出,在t=2.0 s时主机和从机的电阻均发生突变,虽然主机与从机的电感值不同,但二者的电流值基本保持一致.以上表明,主从均流法的两路并联Buck变换器具备均流的能力,且动态响应效果较好. 主从均流法的三路并联Buck变换器的Matlab仿真电路模型和仿真结果如图12和图13所示.由图13可以看出,主控制器和从控制器的电感电流均能稳定在5.0 A左右,且总输出的电感电流可以稳定在10 A.该结果表明,主从并联均流技术可以在多路并联Buck变换器系统中实现均流. 图10 主从均流法的两路并联Buck变换器的电感电流 图11 负载突变前后的仿真结果 图12 主从均流法的三路并联Buck变换器的仿真模型 图13 主从均流法的三路并联Buck变换器的仿真结果 研究表明,本文提出的主从均流控制技术可有效控制多路Buck变换器中各模块的电感电流,并可实现“低压大电流”的输出.本文研究结果可为分布式电源系统的大功率稳定输出提供控制策略.本文在研究中发现,主从均流法不易通过增加模块的数量来实现系统扩容,即该方法缺少灵活便捷性,因此在今后的研究中我们将对此问题做进一步研究.2 双闭环模式的Buck变换器
2.1 电流内环和电压外环的设计
2.2 双闭环控制的并联Buck电路模型


2.3 主从均流法的多路并联Buck变换器的设计

3 仿真实验
3.1 双闭环控制的Buck变换器的仿真

3.2 主从均流法的两路并联Buck变换器的仿真
3.3 主从均流法的三路并联Buck变换器的仿真

4 结论
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06 09:27:18
测控技术(2018年7期)2018-12-09 08:58:46
测控技术(2018年1期)2018-11-25 09:43:30
电子制作(2018年11期)2018-08-04 03:25:58
制造技术与机床(2017年6期)2018-01-19 02:41:22
光学精密工程(2016年4期)2016-11-07 09:05:39
电测与仪表(2016年24期)2016-04-12 00:21:04
探测与控制学报(2015年4期)2015-12-15 15:00:56
电测与仪表(2015年3期)2015-04-09 11:37:38
电测与仪表(2014年11期)2014-04-04 09:21:20